mirror of
https://github.com/RIOT-OS/RIOT.git
synced 2024-12-29 04:50:03 +01:00
doc: add wiki documentation to Doxygen files
This commit is contained in:
parent
f03e52d157
commit
a1e17ab5af
5
boards/acd52832/doc.txt
Normal file
5
boards/acd52832/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_acd52832 ACD52832
|
||||
@ingroup boards
|
||||
@brief Support for the aconno™ ACD52832
|
||||
*/
|
||||
250
boards/airfy-beacon/doc.txt
Normal file
250
boards/airfy-beacon/doc.txt
Normal file
@ -0,0 +1,250 @@
|
||||
/**
|
||||
@defgroup boards_airfy-beacon Airfy Beacon
|
||||
@ingroup boards
|
||||
@brief Support for the Airfy Beacon board
|
||||
|
||||
## Overview
|
||||
|
||||
The Airfy Beacon is utilizing a Nordics NRF51822QFAA SoC.
|
||||
The SoC features 16Kb of RAM, 256Kb of flash ROM and comes on top of the
|
||||
usual micro-controller peripherals with a 2.4GHz radio that supports both
|
||||
Nordics proprietary ShockBurst as well as Bluetooth Low Energy (BLE).
|
||||
|
||||
The board was available via
|
||||
[Indiegogo](https://www.indiegogo.com/projects/airfy-beacon-make-your-smart-
|
||||
home-even-smarter).
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
| MCU | NRF51822QFAA |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0 |
|
||||
| Vendor | Nordic Semiconductor |
|
||||
| RAM | 16Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | 16MHz |
|
||||
| FPU | no |
|
||||
| Timers | 3 (2x 16-bit, 1x 32-bit [TIMER0]) |
|
||||
| ADCs | 1x 10-bit (8 channels) |
|
||||
| UARTs | 1 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| Vcc | 1.8V - 3.6V |
|
||||
| Reference Manual | [Reference Manual](http://www.100y.com.tw/pdf_file/39-Nordic-NRF51822.pdf) |
|
||||
|
||||
|
||||
## Unlocking the flash memory
|
||||
|
||||
If you're holding a new device in your hands, there is a high change that
|
||||
your device's flash memory is locked and RIOT's `make flash` command will fail,
|
||||
saying something like erasing the flash was not possible.
|
||||
|
||||
A solution for this is to reset the chips code memory and user information
|
||||
registers. Just follow these steps:
|
||||
|
||||
1. Follow the steps described above for manually flashing the device:
|
||||
|
||||
1. start openocd using the correct config file `openocd -f boards/airfy-
|
||||
beacon/dist/openocd.cfg`
|
||||
2. connect to openocd using telnet `telnet localhost 4444`
|
||||
|
||||
2. type `halt` to stop the device
|
||||
3. type `nrf51 mass_erase` to reset the code memory
|
||||
4. all done, `make flash` should now work as expected.
|
||||
|
||||
|
||||
## Flashing and Debugging
|
||||
The Airfy Beacon comes without any on-board programming and flashing
|
||||
capabilities. It supports however to be programmed using off-the-shelf
|
||||
programmers such as Segger's JLink or STM's STLink.
|
||||
|
||||
A very simple and affordable way to program and debug this module is to use
|
||||
the integrated ST-Link/V2 programmer of any STM32Fx-discovery board. The needed
|
||||
steps are described in the following sections. If you want to use a standalone
|
||||
ST-Link adapter, you just simply have to alter the wiring to fit for your
|
||||
programmer, the software part is identical.
|
||||
|
||||
### Hardware
|
||||
First of all make sure the your ST-Link device is detected and can be
|
||||
accessed properly. In Linux you might have to adept your `udev` rules
|
||||
accordingly:
|
||||
```
|
||||
> cat 49-stlinkv2.rules
|
||||
# stm32 discovery boards, with onboard st/linkv2
|
||||
# ie, STM32L, STM32F4.
|
||||
# STM32VL has st/linkv1, which is quite different
|
||||
|
||||
SUBSYSTEMS=="usb", ATTRS{idVendor}=="0483", ATTRS{idProduct}=="3748", \
|
||||
MODE:="0666", \
|
||||
SYMLINK+="stlinkv2_%n"
|
||||
|
||||
# If you share your linux system with other users, or just don't like the
|
||||
# idea of write permission for everybody, you can replace MODE:="0666" with
|
||||
# OWNER:="yourusername" to create the device owned by you, or with
|
||||
# GROUP:="somegroupname" and mange access using standard unix groups.
|
||||
|
||||
> sudo cp 49-stlinkv2.rules /etc/udev/rules.d/
|
||||
> sudo udevadm control --reload-rules
|
||||
> sudo udevadm trigger
|
||||
```
|
||||
now replug the usb cable and flash.
|
||||
|
||||
Have a look at the 'Setting up udev rules' section in this [README
|
||||
file](https://github.com/texane/stlink/blob/master/README) if you need help.
|
||||
|
||||
Second you need to enable the standalone ST-Link mode of the discovery board
|
||||
by removing the two `CN2` jumpers, found somewhere in the upper left part of the
|
||||
board. This disconnects the ST-Link programmer from the micro-controller part of
|
||||
the port and enables direct access through the pin-header `CN3`, also labled
|
||||
`SWD`.
|
||||
|
||||
This module supports the Serial Wire Debug (SWD) interface. To access the
|
||||
device the following four lines need to be connected with the STM32x-discovery
|
||||
board:
|
||||
```
|
||||
Airfy Beacon STM32Fx-discovery
|
||||
common ground: GND <-----------> GND
|
||||
supply voltage: VDD <-----------> 3V
|
||||
SWD clock: SWDCLK <-----------> SWCLK (CN3, pin2)
|
||||
SWD data I/O: SWDIO <-----------> SWDIO (CN3, pin4)
|
||||
```
|
||||
|
||||
The following image shows the wiring for an SWD flasher board:
|
||||
|
||||

|
||||
|
||||
### Software
|
||||
Debugging and programming this module works well with [[OpenOCD]].
|
||||
|
||||
We suggest to use a fairly recent version, best use the upstream version from
|
||||
their [git repository](http://sourceforge.net/p/openocd/code/ci/master/tree/).
|
||||
Version `Open On-Chip Debugger 0.9.0-dev-00184-g885f438 (2014-10-19-14:49)`
|
||||
is reported to work.
|
||||
|
||||
### Programming the Device
|
||||
To program the Airfy Beacon, just go to your RIOT application and type:
|
||||
```
|
||||
make flash
|
||||
```
|
||||
and voila, the new firmware should be flashed onto your device.
|
||||
|
||||
### Resetting the Device
|
||||
As the Airfy Beacon module does not provide a reset button, RIOT includes a
|
||||
target to reset the board. To do that, just type
|
||||
```
|
||||
make reset
|
||||
```
|
||||
and your board will reboot.
|
||||
|
||||
### Debugging the Device
|
||||
The debugging setup comprises of two parts: a GDB server and a GDB client. To
|
||||
usual workflow is to start the GDB server first and then connect to it with some
|
||||
kind of front-end (e.g. command line, IDE, ...).
|
||||
|
||||
To start the GDB server, just type
|
||||
```
|
||||
make debug-server
|
||||
```
|
||||
This will start a local GDB server on `port 3333`.
|
||||
|
||||
If you are fine with working with the GDB command line client, you can start
|
||||
debugging your device by just typing
|
||||
```
|
||||
make debug
|
||||
```
|
||||
in a second terminal window. This will automatically connect to your
|
||||
previously opened GDB server and will also load your corresponding .elf file.
|
||||
|
||||
Alternatively you can configure your IDE (e.g. eclipse or similar) to connect
|
||||
directly to the GDB server. [See here for more information on how to configure
|
||||
Eclipse](https://github.com/RIOT-OS/RIOT/wiki/Using-the-Eclipse-IDE-for-C-and-
|
||||
CPP-Developers,-Howto)
|
||||
|
||||
|
||||
### Program the device manually
|
||||
For OpenOCD to work correctly, you need the following configuration file
|
||||
(which you can also find in `RIOTDIR/boards/airfy-beacon/dist/openocd.cfg`:
|
||||
|
||||
```
|
||||
$ cat RIOTDIR/boards/airfy-beacon/openocd.cfg
|
||||
# nRF51822 Target
|
||||
source [find interface/stlink-v2.cfg]
|
||||
|
||||
transport select hla_swd
|
||||
|
||||
set WORKAREASIZE 0x4000
|
||||
source [find target/nrf51.cfg]
|
||||
|
||||
# use hardware reset, connect under reset
|
||||
#reset_config srst_only srst_nogate
|
||||
```
|
||||
|
||||
You can now program your device by doing the following:
|
||||
|
||||
1. start openocd with: `openocd -d3 -f RIOTDIR/boards/airfy-
|
||||
beacon/dist/openocd.cfg`
|
||||
2. open a new terminal an connect with telnet: `telnet 127.0.0.1 4444`
|
||||
3. do the following steps to flash (only use bank #0 starting from address
|
||||
0):
|
||||
|
||||
```
|
||||
> flash banks
|
||||
#0 : nrf51.flash (nrf51) at 0x00000000, size 0x00040000, buswidth 1,
|
||||
chipwidth 1
|
||||
#1 : nrf51.uicr (nrf51) at 0x10001000, size 0x000000fc, buswidth 1, chipwidth
|
||||
1
|
||||
|
||||
> halt
|
||||
target state: halted
|
||||
target halted due to debug-request, current mode: Thread
|
||||
xPSR: 0x61000000 pc: 0x00000e1a msp: 0x20001b2c
|
||||
|
||||
> flash write_image erase PATH-TO-YOUR-BINARY/YOUR-BINARY.bin 0
|
||||
wrote xxx bytes from file PATH-TO-YOUR-BINARY/YOUR-BINARY.bin in xx.yys
|
||||
(x.yyy KiB/s)
|
||||
|
||||
> reset
|
||||
```
|
||||
|
||||
### Debugging manually
|
||||
|
||||
First you have to start OpenOCD as described in the section above.
|
||||
|
||||
Then enter the following in a new terminal:
|
||||
|
||||
```
|
||||
$ arm-none-eabi-gdb -tui "<your binary ELF>"
|
||||
|
||||
(gdb) target remote localhost:3333
|
||||
Remote debugging using localhost:3333
|
||||
0x000119ce in ?? ()
|
||||
|
||||
(gdb) load
|
||||
Loading section .text, size 0x2284 lma 0x16000
|
||||
Loading section .ARM.exidx, size 0x8 lma 0x18284
|
||||
Loading section .data, size 0x458 lma 0x1828c
|
||||
Loading section .jcr, size 0x4 lma 0x186e4
|
||||
Transfer rate: x KB/sec, xxxx bytes/write.
|
||||
|
||||
(gdb) monitor reset halt
|
||||
target state: halted
|
||||
target halted due to debug-request, current mode: Thread
|
||||
xPSR: 0xc1000000 pc: 0x000006d0 msp: 0x000007c0
|
||||
|
||||
(gdb) break main
|
||||
Breakpoint 3 at 0x123123: file ../main.c, line xx.
|
||||
(gdb) continue
|
||||
Continuing.
|
||||
```
|
||||
|
||||
### Using UART
|
||||
|
||||
The UART pins are configured in `boards/airfy-beacon/include/periph_conf.h`.
|
||||
The default values are PIN 17 and 18.
|
||||
|
||||
The default Baud rate is `115 200`.
|
||||
*/
|
||||
@ -1,13 +1,11 @@
|
||||
/*
|
||||
* Copyright (C) 2017 Freie Universität Berlin
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @defgroup boards_arduino-due Arduino Due
|
||||
* @ingroup boards
|
||||
* @brief Support for the Arduino Due board
|
||||
Copyright (C) 2017 Freie Universität Berlin
|
||||
|
||||
This file is subject to the terms and conditions of the GNU Lesser
|
||||
General Public License v2.1. See the file LICENSE in the top level
|
||||
directory for more details.
|
||||
|
||||
@defgroup boards_arduino-due Arduino Due
|
||||
@ingroup boards
|
||||
@brief Support for the Arduino Due board
|
||||
*/
|
||||
|
||||
27
boards/arduino-duemilanove/doc.txt
Normal file
27
boards/arduino-duemilanove/doc.txt
Normal file
@ -0,0 +1,27 @@
|
||||
/**
|
||||
@defgroup boards_arduino-duemilanove Arduino Duemilanove
|
||||
@ingroup boards
|
||||
@brief Support for the Arduino Duemilanove board
|
||||
|
||||
## Overview
|
||||
The Arduino Duemilanove ("2009") is a microcontroller board based on the
|
||||
ATmega168 or ATmega328.
|
||||
Only the ATmega328 version is supported by RIOT.
|
||||
|
||||
This board is very similar to the Arduino Uno board.
|
||||
In fact, The Uno is just an evolution of the Duemilanove/Atmega328 version,
|
||||
with a better USB/Serial chip and a new bootloader.
|
||||
Otherwise it's the same. Brief descriptions of both boards are available at
|
||||
the official [Arduino web site.](https://www.arduino.cc/en/Main/Boards)
|
||||
|
||||
For details, please look at the [Uno page.](@ref boards_arduino-uno)
|
||||
|
||||
## Flashing the device
|
||||
Flashing RIOT on the Arduino Duemilanove is quite straight forward, just
|
||||
connect your Arduino Uno using the programming port to your host computer and
|
||||
type:
|
||||
|
||||
`make BOARD=arduino-duemilanove flash`
|
||||
|
||||
This should take care of everything!
|
||||
*/
|
||||
197
boards/arduino-mega2560/doc.txt
Normal file
197
boards/arduino-mega2560/doc.txt
Normal file
@ -0,0 +1,197 @@
|
||||
/**
|
||||
@defgroup boards_arduino-mega2560 Arduino Mega 2560
|
||||
@ingroup boards
|
||||
@brief Support for the Arduino Mega 2560 board
|
||||
|
||||
## Overview
|
||||
|
||||
The Arduino Mega2560 is one of the larger Arduino boards. It is based on
|
||||
Atmel's AVR architecture and sports an ATmega2560 MCU. It is like many Arduinos
|
||||
extensible by using shields.
|
||||
|
||||
NOTE: In case you are wondering if flashing RIOT on your Arduino Mega2560
|
||||
will overwrite the Arduino bootloader: you can be reassured. After flashing RIOT
|
||||
you can without any intermediate steps just go over to flashing Arduino sketches
|
||||
again.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
| MCU | ATmega2560 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | AVR/ATmega |
|
||||
| Vendor | Atmel |
|
||||
| RAM | 8Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | 16MHz |
|
||||
| Timers | 6 (2x 8bit, 4x 16bit) |
|
||||
| ADCs | 14 analog input pins (10bit resolution|
|
||||
| UARTs | 4 |
|
||||
| SPIs | 1 |
|
||||
| I2Cs | 1 (called TWI) |
|
||||
| Vcc | 5.0V |
|
||||
| Datasheet / Reference Manual | [Datasheet and Reference Manual](http://www.atmel.com/images/atmel-2549-8-bit-avr-microcontroller-atmega640-1280-1281-2560-2561_datasheet.pdf) |
|
||||
| Board Manual | [Board Manual](http://arduino.cc/en/Main/arduinoBoardMega2560)|
|
||||
|
||||
Flashing RIOT on the Arduino Mega2560 is quite straight forward, just connect
|
||||
your Arduino Mega2560 using the programming port to your host computer and type:
|
||||
|
||||
`make BOARD=arduino-mega2560 flash`
|
||||
|
||||
This should take care of everything!
|
||||
|
||||
We use the open `avrdude` tool to write the new code into the ATmega2560's
|
||||
flash
|
||||
|
||||
## State
|
||||
While there is basic support in RIOT, there are still some parts missing:
|
||||
* Timer implementation needs love (ideally simulate a 32bit timer by adding
|
||||
an overflow counter to the implementation)
|
||||
* LPM driver missing
|
||||
* ~~SPI driver missing~~ (See https://github.com/RIOT-OS/RIOT/pull/4045)
|
||||
* I2C/TWI driver missing
|
||||
* ADC driver missing
|
||||
* PWM driver missing
|
||||
|
||||
## Debugging (WIP)
|
||||
The ATmega2560 MCU supports JTAG debugging. To use the JTAG debugging on the
|
||||
Arduino Mega 2560 an external JTAG debugger is required. There are several
|
||||
options for this MCU/board:
|
||||
* [AVR JTAGICE mkII](http://www.atmel.com/tools/avrjtagicemkii.aspx)
|
||||
* [JTAGICE3](http://www.atmel.com/tools/jtagice3.aspx)
|
||||
* [AVR Dragon](http://www.atmel.com/tools/avrdragon.aspx)
|
||||
|
||||
There may be other options as well, but I can't comment on how well they
|
||||
work. I tested debugging RIOT on the Arduino Mega 2560 using an AVR Dragon.
|
||||
|
||||
**Important:** To use a JTAG Debugger in conjunction with the ATmega2560 it
|
||||
is required to change the fuses of the MCU. Additionally it seems to be required
|
||||
to overwrite the bootloader on the MCU. Because of that it is a necessity to use
|
||||
an ISP (in system programmer) to do the debugging. This isn't an issue because
|
||||
all of the afore mentioned devices have ISP capabilities, but it requires some
|
||||
additional steps to get back normal operation after debugging:
|
||||
* flash a new arduino bootloader on the device, e.g. [this one](https://raw.
|
||||
githubusercontent.com/arduino/Arduino/master/hardware/arduino/bootloaders/stk500
|
||||
v2/stk500boot_v2_mega2560.hex)
|
||||
* restore the fuses to the default state.
|
||||
|
||||
|
||||
|
||||
### Wiring for the AVR Dragon
|
||||

|
||||
|
||||
In contrast to normal use (USB only), for debugging there are two separate
|
||||
wiring changes to do:
|
||||
* connecting the ISP headers (picture: orange cables).
|
||||
* connecting the JTAG header to the respective pins on the Arduino (picture:
|
||||
blue cables)
|
||||
|
||||
Connecting the ISP headers is straight forward: Pin1 on the Dragon connects
|
||||
to Pin1 on the Arduino Mega2560 and so on.
|
||||
Connecting the JTAG header needs the following pin mapping:
|
||||
|
||||
|AVR Dragon | Arduino Mega 2560|Signal|
|
||||
|:----------|:-----------------|:-----|
|
||||
|JTAG1 |A4 |TCK |
|
||||
|JTAG2 o. 10|GND |GND |
|
||||
|JTAG3 |A6 |TDO |
|
||||
|JTAG4 |+5V |+5V |
|
||||
|JTAG5 |A5 |TMS |
|
||||
|JTAG9 |A7 |TDI |
|
||||
|
||||
Ax refers to the analog in pins on the Arduino Mega 2560.
|
||||
JTAG2 and JTAG10 on the AVR Dragon are both GND, one connection suffices.
|
||||
All other JTAG Pins are not needed for debugging the Arduino Mega2560
|
||||
|
||||
Additional information can be found
|
||||
[here](http://automation.binarysage.net/?p=1515) or
|
||||
[here](http://arduino.cc/en/Hacking/PinMapping2560).
|
||||
|
||||
### Fuses
|
||||
**default:**
|
||||
|
||||
| Fuse | Setting |
|
||||
|:--------------|:--------|
|
||||
| Low Fuse | 0xFF |
|
||||
| High Fuse | 0xD8 |
|
||||
| Extended Fuse | 0xFD |
|
||||
avrdude arguments: `-U lfuse:w:0xff:m -U hfuse:w:0xD8:m -U efuse:w:0xfd:m`
|
||||
|
||||
**debugging:**
|
||||
|
||||
| Fuse | Setting |
|
||||
|:--------------|:--------|
|
||||
| Low Fuse | 0xFF |
|
||||
| High Fuse | 0x18 |
|
||||
| Extended Fuse | 0xFD |
|
||||
|
||||
(Both `OCDEN` and `JTAGEN` fuse bits are enabled)
|
||||
|
||||
avrdude arguments: `-U lfuse:w:0xff:m -U hfuse:w:0x18:m -U efuse:w:0xfd:m`
|
||||
|
||||
A useful tool to calculate fuse settings yourself is this [fuse
|
||||
calculator](http://www.engbedded.com/fusecalc/), which also works with other AVR
|
||||
MCUs.
|
||||
|
||||
### Debugging RIOT on the Arduino Mega 2560
|
||||
With PR [#1696](https://github.com/RIOT-OS/RIOT/pull/1696) merged the
|
||||
following commands should work for debugging:
|
||||
|
||||
`make BOARD=arduino-mega2560 debug-server`: starts an
|
||||
[avarice](http://avarice.sourceforge.net/) (avarice needs to be installed)
|
||||
server that `avr-gdb` can connect to.
|
||||
|
||||
`make BOARD=arduino-mega2560 debug`: starts an avarice server and connects
|
||||
`avr-gdb` to it.
|
||||
|
||||
**Note:** To flash the board via the ISP while debugging the additional flag
|
||||
`PROGRAMMER=dragon_isp` is required.
|
||||
For a full rebuild and debug cycle use the following command:
|
||||
|
||||
`make BOARD=arduino-mega2560 PROGRAMMER=dragon_isp clean all flash debug`
|
||||
|
||||
# Mac OSX El Capitan users
|
||||
Mac users can flash this Arduino board by installing `avr-gcc` and `avrdude`
|
||||
from `brew`.
|
||||
Debug is possible but is not covered in this wiki, if you need it, please
|
||||
refer to this [page](https://www.obdev.at/products/crosspack/index.html).
|
||||
|
||||
## Toolchain installation
|
||||
You should have installed `brew` to follow this instructions. Otherwise,
|
||||
[install](http://digitizor.com/install-homebrew-osx-el-capitan/) it.
|
||||
|
||||
Then, add a repository:
|
||||
|
||||
```
|
||||
$ brew tap osx-cross/avr
|
||||
```
|
||||
|
||||
Afterwards, install `avr-gcc`:
|
||||
|
||||
```
|
||||
$ brew install avr-libc
|
||||
```
|
||||
|
||||
And finally:
|
||||
|
||||
```
|
||||
$ brew install avrdude --with-usb
|
||||
```
|
||||
|
||||
With this you should be allowed to compile and to flash code to the Arduino
|
||||
Mega.
|
||||
|
||||
## Troubleshooting for serial connection
|
||||
In OSX El Capitan, there is no native driver working for the serial
|
||||
connection.
|
||||
|
||||
In order to install it, you must download and install a CDC-ACM driver from
|
||||
[here](http://eng.aten.eu/products/Mobility-&-USB/USB-Converters/USB-to-Serial-
|
||||
Converter~UC232A.html) (Go to Resources/Software & Driver/Mac Software).
|
||||
|
||||
A reboot should be enough to find your Arduino on `/dev/tty.usbmodem*`
|
||||
*/
|
||||
5
boards/arduino-mkr1000/doc.txt
Normal file
5
boards/arduino-mkr1000/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_arduino-mkr1000 Arduino MKR1000
|
||||
@ingroup boards
|
||||
@brief Support for the Arduino MKR1000 board.
|
||||
*/
|
||||
@ -1,34 +1,34 @@
|
||||
/**
|
||||
* @defgroup boards_arduino-mkrfox1200 Arduino MKRFOX1200
|
||||
* @ingroup boards
|
||||
* @brief Support for the Arduino MKRFOX1200 board.
|
||||
*
|
||||
* ### General information
|
||||
*
|
||||
* The [Arduino MKRFOX1200](https://www.arduino.cc/en/Main.ArduinoBoardMKRFox1200) board is
|
||||
* a learning and development board that provides Sigfox connectivity and is
|
||||
* powered by an Atmel SAMD21 microcontroller.
|
||||
*
|
||||
* ### Pinout
|
||||
*
|
||||
* <img src="https://www.arduino.cc/en/uploads/Main/MKR1000_pinout.png"
|
||||
* alt="Arduino MKRFOX1200 pinout" style="height:800px;"/>
|
||||
*
|
||||
* ### Flash the board
|
||||
*
|
||||
* 1. Put the board in bootloader mode by double tapping the reset button.<br/>
|
||||
* When the board is in bootloader mode, the user led (green) oscillates
|
||||
* smoothly.
|
||||
*
|
||||
*
|
||||
* 2. Use `BOARD=arduino-mkrfox1200` with the `make` command.<br/>
|
||||
* Example with `hello-world` application:
|
||||
* ```
|
||||
* make BOARD=arduino-mkrfox1200 -C examples/hello-world flash
|
||||
* ```
|
||||
*
|
||||
* ### Accessing STDIO via UART
|
||||
*
|
||||
* To access the STDIO of RIOT, a FTDI to USB converter needs to be plugged to
|
||||
* the RX/TX pins on the board.
|
||||
*/
|
||||
@defgroup boards_arduino-mkrfox1200 Arduino MKRFOX1200
|
||||
@ingroup boards
|
||||
@brief Support for the Arduino MKRFOX1200 board.
|
||||
|
||||
### General information
|
||||
|
||||
The [Arduino MKRFOX1200](https://www.arduino.cc/en/Main.ArduinoBoardMKRFox1200) board is
|
||||
a learning and development board that provides Sigfox connectivity and is
|
||||
powered by an Atmel SAMD21 microcontroller.
|
||||
|
||||
### Pinout
|
||||
|
||||
<img src="https://www.arduino.cc/en/uploads/Main/MKR1000_pinout.png"
|
||||
alt="Arduino MKRFOX1200 pinout" style="height:800px;"/>
|
||||
|
||||
### Flash the board
|
||||
|
||||
1. Put the board in bootloader mode by double tapping the reset button.<br/>
|
||||
When the board is in bootloader mode, the user led (green) oscillates
|
||||
smoothly.
|
||||
|
||||
|
||||
2. Use `BOARD=arduino-mkrfox1200` with the `make` command.<br/>
|
||||
Example with `hello-world` application:
|
||||
```
|
||||
make BOARD=arduino-mkrfox1200 -C examples/hello-world flash
|
||||
```
|
||||
|
||||
### Accessing STDIO via UART
|
||||
|
||||
To access the STDIO of RIOT, a FTDI to USB converter needs to be plugged to
|
||||
the RX/TX pins on the board.
|
||||
*/
|
||||
|
||||
5
boards/arduino-mkrzero/doc.txt
Normal file
5
boards/arduino-mkrzero/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_arduino-mkrzero Arduino MKRZERO
|
||||
@ingroup boards
|
||||
@brief Support for the Arduino MKRZERO board.
|
||||
*/
|
||||
42
boards/arduino-uno/doc.txt
Normal file
42
boards/arduino-uno/doc.txt
Normal file
@ -0,0 +1,42 @@
|
||||
/**
|
||||
@defgroup boards_arduino-uno Arduino Uno
|
||||
@ingroup boards
|
||||
@brief Support for the Arduino Uno board
|
||||
|
||||
## Overview
|
||||
|
||||
The Arduino Uno is one of the cheapest board to start and discover with
|
||||
electronics and embedded coding. It is based on Atmel's AVR architecture and
|
||||
sports an ATmega328p MCU. It is like many Arduinos extensible by using shields.
|
||||
|
||||
### MCU
|
||||
| MCU | ATmega328p |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | AVR/ATmega |
|
||||
| Vendor | Atmel |
|
||||
| RAM | 2Kb |
|
||||
| Flash | 32Kb |
|
||||
| Frequency | 16MHz |
|
||||
| Timers | 3 (2x 8bit, 1x 16bit) |
|
||||
| ADCs | 6 analog input pins |
|
||||
| UARTs | 1 |
|
||||
| SPIs | 1 |
|
||||
| I2Cs | 1 (called TWI) |
|
||||
| Vcc | 5.0V |
|
||||
| Datasheet / Reference Manual | [Datasheet and Reference Manual](http://www.atmel.com/images/atmel-8271-8-bit-avr-microcontroller-atmega48a-48pa-88a-88pa-168a-168pa-328-328p_datasheet_complete.pdf) |
|
||||
| Board Manual | [Board Manual](https://www.arduino.cc/en/Main/ArduinoBoardUno)|
|
||||
|
||||
## Flashing the device
|
||||
Flashing RIOT on the Arduino Uno is quite straight forward, just connect your
|
||||
Arduino Uno using the programming port to your host computer and type:
|
||||
|
||||
`make BOARD=arduino-uno flash`
|
||||
|
||||
This should take care of everything!
|
||||
|
||||
We use the open `avrdude` tool to write the new code into the ATmega328p's
|
||||
flash
|
||||
|
||||
##Caution
|
||||
Don't expect having a working network stack due to very limited resources.
|
||||
*/
|
||||
91
boards/arduino-zero/doc.txt
Normal file
91
boards/arduino-zero/doc.txt
Normal file
@ -0,0 +1,91 @@
|
||||
/**
|
||||
@defgroup boards_arduino-zero Arduino Zero
|
||||
@ingroup boards
|
||||
@brief Support for the Arduino Zero board.
|
||||
|
||||
## Overview
|
||||
|
||||
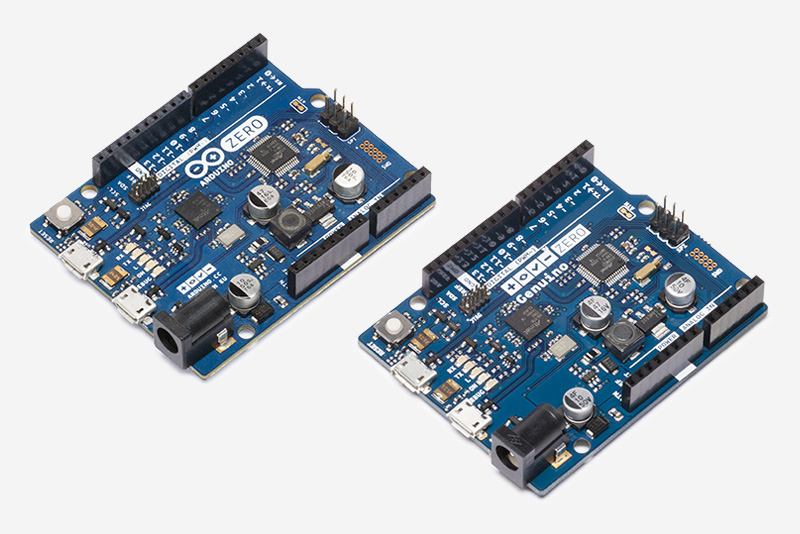
The `Arduino Zero` is a board by Arduino/Genuino featuring a ATSAMD21G18A.
|
||||
The SAMD21 is a ARM Cortex-M0+ micro-controller. It has 256Kb of flash memory
|
||||
and 32Kb of RAM.
|
||||
|
||||
This board is available [here](https://store.arduino.cc/product/GBX00003).
|
||||
|
||||
## Hardware
|
||||
|
||||
|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | ATSAMD21G18A |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0+ |
|
||||
| Vendor | Atmel |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | up to 48MHz |
|
||||
| FPU | no |
|
||||
| Timers | 6 (1x 16-bit, 2x 24-bit, 3x 32-bit) |
|
||||
| ADCs | 6x 12-bit channels) |
|
||||
| UARTs | 2 |
|
||||
| SPIs | max 6 (see UART) |
|
||||
| I2Cs | max 6 (see UART) |
|
||||
| Vcc | 1.8V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.atmel.com/Images/Atmel-42181-SAM-D21_Datasheet.pdf) |
|
||||
|
||||
### User Interface
|
||||
|
||||
1 LED:
|
||||
|
||||
| Device | PIN |
|
||||
|:------ |:--- |
|
||||
| LED0 | PA17 |
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
Notice that the initial support for the Arduino Zero was based on samr21-xpro
|
||||
and Sodaq Autonomo.
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | samd21 | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | to be tested | |
|
||||
| | UART | yes | two UARTs|
|
||||
| | I2C | yes | |
|
||||
| | SPI | yes | |
|
||||
| | ADC | not implemented | |
|
||||
| | USB | no | |
|
||||
| | RTT | yes | |
|
||||
| | RTC | yes | |
|
||||
| | RNG | no | no HW module |
|
||||
| | Timer | yes | |
|
||||
|
||||
|
||||
Detailed information on the board can be found on [the official web page](https://www.arduino.cc/en/Main/ArduinoBoardZero).
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The standard method for flashing RIOT to the Arduino Zero is using OpenOCD.
|
||||
For this to work properly, **you have to make sure to use a very recent version
|
||||
of OpenOCD**. Arduino-IDE comes with openocd v0.9.0 which is known to work.
|
||||
Also Ubuntu 16.04 has openocd v0.9.0.
|
||||
|
||||
Refer to https://github.com/RIOT-OS/RIOT/wiki/OpenOCD for building OpenOCD
|
||||
and make sure "cmsis-dap" and "hidapi-libusb" are enabled.
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
To build software for the Arduino Zero board we strongly recommend the usage
|
||||
of the [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded) toolchain.
|
||||
|
||||
|
||||
## Known Issues / Problems
|
||||
|
||||
### Stack sizes
|
||||
The default stack sizes have not been tuned properly yet. If in doubt why
|
||||
your application crashes try increasing the default stack sizes and use `ps` to
|
||||
find out how much stack is being used.
|
||||
Tracked in https://github.com/RIOT-OS/RIOT/issues/2228
|
||||
*/
|
||||
5
boards/avsextrem/doc.txt
Normal file
5
boards/avsextrem/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_avsextrem Avsextrem
|
||||
@ingroup boards
|
||||
@brief Support for the Avsextrem board
|
||||
*/
|
||||
5
boards/b-l072z-lrwan1/doc.txt
Normal file
5
boards/b-l072z-lrwan1/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_b-l072z-lrwan1 ST B-L072Z-LRWAN1 LoRa discovery
|
||||
@ingroup boards
|
||||
@brief Support for the ST B-L072Z-LRWAN1 board
|
||||
*/
|
||||
5
boards/b-l475e-iot01a/doc.txt
Normal file
5
boards/b-l475e-iot01a/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_b-l475e-iot01a ST B-L475E-IOT01A
|
||||
@ingroup boards
|
||||
@brief Support for the ST B-L475E-IOT01A board
|
||||
*/
|
||||
133
boards/bluepill/doc.txt
Normal file
133
boards/bluepill/doc.txt
Normal file
@ -0,0 +1,133 @@
|
||||
/**
|
||||
@defgroup boards_bluepill Bluepill board
|
||||
@ingroup boards
|
||||
@brief Support for the stm32f103c8 based bluepill board.
|
||||
|
||||
## Overview
|
||||
|
||||
The bluepill is an STM32F103 based board which can be bought for around
|
||||
2€ on sides like AliExpress, eBay and others. Although the STM32F130C8
|
||||
MCU nominally has 64 KB flash, most [actually have 128 KB
|
||||
flash][Flashsize].
|
||||
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
|
||||
| MCU | STM32F103C8 |
|
||||
|:----------|:-----------------------|
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | STMicroelectronics |
|
||||
| RAM | 20 KB |
|
||||
| Flash | 64 KB / 128 KB |
|
||||
| Frequency | up to 72 MHz |
|
||||
| Timer | 3x 16-Bit |
|
||||
| ADC | 2x 12-bit, 10 channels |
|
||||
| UART | 3 |
|
||||
| SPI | 2 |
|
||||
| I2C | 2 |
|
||||
| CAN | 1 |
|
||||
| Vcc | 2.0 to 3.6 V |
|
||||
| Datasheet | [Datasheet][Datasheet] |
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| ID | Supported |
|
||||
|:----- |:--------- |
|
||||
| GPIO | yes |
|
||||
| PWM | yes |
|
||||
| UART | yes |
|
||||
| ADC | yes |
|
||||
| I2C | no |
|
||||
| SPI | yes |
|
||||
| USB | no |
|
||||
| Timer | yes |
|
||||
| CAN | no |
|
||||
|
||||
|
||||
## Flashing
|
||||
|
||||
To program and debug the board you need a SWD capable debugger. The
|
||||
easiest way is using [OpenOCD][OpenOCD]. If you have OpenOCD installed,
|
||||
you can flash the device with:
|
||||
|
||||
$ make BOARD=bluepill flash
|
||||
|
||||
### Additional Flash
|
||||
|
||||
To make use of the entire 128 KB flash, compile your application with:
|
||||
|
||||
$ make BOARD=bluepill CPU_MODEL=stm32f103cb
|
||||
|
||||
This sets the `CPU_MODEL` make variable to `stm32f103cb`, the default
|
||||
value is `stm32f103c8`. These two CPU models basically only have one
|
||||
major difference, the latter has 128 KB flash while the former has 64
|
||||
KB.
|
||||
|
||||
If you want to flash a binary compiled this way you either need to
|
||||
figure out how to adjust the OpenOCD configuration to make it use 128 KB
|
||||
flash or use this [stlink fork][caboStlink] which has a
|
||||
[patch][caboPatch] to make use of the entire 128 KB flash using:
|
||||
|
||||
$ C8T6HACK=1 st-flash write /dev/sgX $pathToHexFile 0x8000000
|
||||
|
||||
|
||||
## Connecting via Serial
|
||||
|
||||
The default UART port used is UART2, which uses pins A2 (TX) and A3 (RX).
|
||||
|
||||
## Using PWM
|
||||
|
||||
PWM is available at pins A8 to A11.
|
||||
|
||||
## Known Issues
|
||||
|
||||
### USB connector
|
||||
|
||||
The Micro-USB port is sometimes not soldered properly. Also, it is
|
||||
usually equipped with an incorrect resistor. [This can be fixed multiple
|
||||
ways][USB].
|
||||
|
||||
### Flashing abortion
|
||||
|
||||
Some boards have problems to flash on the first try. It may help, to press
|
||||
the reset-button, start the flashing and release it while doing so.
|
||||
|
||||
|
||||
## Where to buy
|
||||
|
||||
The board is sold under different names. On some sites it is called
|
||||
`bluepill` or `blue pill`. On others you might find it by searching for
|
||||
`stm32f103c8` or `stm32f103c8t6`.
|
||||
|
||||
Try [eBay][eBay] or [AliExpress][AliExpress].
|
||||
|
||||
|
||||
## Further reading
|
||||
|
||||
* http://wiki.stm32duino.com/index.php?title=Blue_Pill
|
||||
* http://wiki.stm32duino.com/index.php?title=Maple_Mini#Clones
|
||||
* http://www.st.com/content/st_com/en/products/microcontrollers/stm32-32-bit-
|
||||
arm-cortex-mcus/stm32-mainstream-mcus/stm32f1-series/stm32f103/stm32f103c8.html
|
||||
|
||||
[Datasheet]: http://www.st.com/content/ccc/resource/technical/document/datash
|
||||
eet/33/d4/6f/1d/df/0b/4c/6d/CD00161566.pdf/files/CD00161566.pdf/jcr:content/tran
|
||||
slations/en.CD00161566.pdf
|
||||
[Flashsize]:
|
||||
http://wiki.stm32duino.com/index.php?title=Blue_Pill#128_KB_flash_on_C8_version
|
||||
[eBay]: https://www.ebay.com/sch/i.html?_nkw=stm32f103c8
|
||||
[AliExpress]: https://www.aliexpress.com/wholesale?SearchText=STM32F103C8T6
|
||||
[OpenOCD]: https://github.com/RIOT-OS/RIOT/wiki/OpenOCD
|
||||
[USB]:
|
||||
http://wiki.stm32duino.com/index.php?title=Blue_Pill#Hardware_installation
|
||||
[imgTop]:
|
||||
http://wiki.stm32duino.com/images/thumb/1/19/STM32_Blue_Pill_top.jpg/800px-
|
||||
STM32_Blue_Pill_top.jpg
|
||||
[caboStlink]: https://github.com/cabo/stlink
|
||||
[caboPatch]:
|
||||
https://github.com/cabo/stlink/commit/e2ff1710ca6caeb55b5b99f7bd8a29181ccf533d
|
||||
*/
|
||||
5
boards/calliope-mini/doc.txt
Normal file
5
boards/calliope-mini/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_calliope-mini Calliope mini
|
||||
@ingroup boards
|
||||
@brief Support for the Calliope mini
|
||||
*/
|
||||
147
boards/cc2538dk/doc.txt
Normal file
147
boards/cc2538dk/doc.txt
Normal file
@ -0,0 +1,147 @@
|
||||
/**
|
||||
@defgroup boards_cc2538dk CC2538DK
|
||||
@ingroup boards
|
||||
@brief Support for the Texas Instruments CC2538DK board.
|
||||
|
||||
## Overview
|
||||
|
||||
The [CC2538DK](http://www.ti.com/tool/cc2538dk) is Texas Instruments'
|
||||
developer kit for the CC2538 SoC MCU, which combines an ARM Cortex-M3
|
||||
microcontroller with an IEEE802.15.4 radio.
|
||||
|
||||
## Hardware
|
||||
|
||||
|
||||
|
||||
| MCU | CC2538SF53 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | Texas Instruments |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | 32MHz |
|
||||
| FPU | no |
|
||||
| Timers | 4 |
|
||||
| ADCs | 1x 12-bit (8 channels) |
|
||||
| UARTs | 2 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 1 |
|
||||
| Vcc | 2V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.ti.com/lit/gpn/cc2538) (pdf file) |
|
||||
| Reference Manual | [Reference Manual](http://www.ti.com/lit/pdf/swru319) |
|
||||
|
||||
|
||||
## Flashing and Debugging
|
||||
|
||||
By default, RIOT will attempt to flash the MCU via the USB UART using a
|
||||
Python script named [cc2538-bsl](https://github.com/JelmerT/cc2538-bsl).
|
||||
Hold down the SELECT pushbutton while pressing RESET to activate the MCU's
|
||||
internal bootloader, then run:
|
||||
|
||||
`make flash`
|
||||
|
||||
Activating this bootloader is NOT enabled if the flash content is in factory
|
||||
default state (e.g. after unboxing). To set the bits in the CCA accordingly you
|
||||
have to follow the guidelines found
|
||||
[here](http://processors.wiki.ti.com/index.php/CC2538_Bootloader_Backdoor). To
|
||||
manage this first time access you have to download the
|
||||
["Uniflash"](http://processors.wiki.ti.com/index.php/Category:CCS_UniFlash) tool
|
||||
at TI's website.
|
||||
|
||||
Some Linux machines may not recognize the CC2538DK's vendor and product ID
|
||||
automatically.
|
||||
If a /dev/ttyUSBx device does not appear, try specifying these codes to the
|
||||
FTDI driver manually:
|
||||
|
||||
`echo 0403 a6d1 > /sys/bus/usb-serial/drivers/ftdi_sio/new_id`
|
||||
|
||||
If the path `/sys/bus/usb-serial/drivers/ftdi_sio/` doesn't exist, you also
|
||||
have to load the module `ftdi_sio` by hand. Alternatively, you can install a
|
||||
`udev` rule that configures this on device connection, see [this post on TI's
|
||||
E2E site](https://e2e.ti.com/support/microcontrollers/c2000/f/171/p/359074/18434
|
||||
85#1843485) for details.
|
||||
|
||||
RIOT will use /dev/ttyUSB1 by default, but if the UART is given a different
|
||||
device name, you can specity it to RIOT using the PORT variable:
|
||||
|
||||
`make PORT=/dev/ttyUSB2 flash`
|
||||
|
||||
To flash using a Segger JLink JTAG adapter you need to install Segger's
|
||||
JLinkExe tool, then specify `PROGRAMMER=jlink` when flashing:
|
||||
|
||||
`make PROGRAMMER=jlink flash`
|
||||
|
||||
|
||||
# Mac OSX **El Capitan** users
|
||||
Be prevented that you'll need to disable Apple's System Integrity Protection
|
||||
to allow FTDI unsigned drivers to be loaded on your Mac.
|
||||
|
||||
To do this, reboot in recovery mode, by pressing simultaneously `cmd + R`
|
||||
while booting.
|
||||
Then, on the recovery mode go to Utilities/Terminal and type:
|
||||
|
||||
```
|
||||
# csrutil status
|
||||
```
|
||||
|
||||
If you see something like:
|
||||
|
||||
```
|
||||
System Integrity Protection status: enabled.
|
||||
```
|
||||
|
||||
You should disable it by typing:
|
||||
|
||||
```
|
||||
# csrutil disable
|
||||
```
|
||||
|
||||
then reboot
|
||||
|
||||
```
|
||||
# reboot
|
||||
```
|
||||
|
||||
and be sure that your System Integrity Protection is disabled
|
||||
|
||||
```
|
||||
$ csrutil status
|
||||
System Integrity Protection status: disabled.
|
||||
```
|
||||
|
||||
Afterwards you'll be able to install this [driver](https://cdn.sparkfun.com/a
|
||||
ssets/learn_tutorials/7/4/FTDIUSBSerialDriver_v2_3.dmg).
|
||||
|
||||
If everything goes OK reboot your Mac and then edit
|
||||
`/System/Library/Extensions/FTDIUSBSerialDriver.kext/Contents/Info.plist` with a
|
||||
text editor.
|
||||
Add the following block somewhere under `IOKitPersonalities`:
|
||||
```
|
||||
<key>TI_XDS100v3</key>
|
||||
<dict>
|
||||
<key>CFBundleIdentifier</key>
|
||||
<string>com.FTDI.driver.FTDIUSBSerialDriver</string>
|
||||
<key>IOClass</key>
|
||||
<string>FTDIUSBSerialDriver</string>
|
||||
<key>IOProviderClass</key>
|
||||
<string>IOUSBInterface</string>
|
||||
<key>bConfigurationValue</key>
|
||||
<integer>1</integer>
|
||||
<key>bInterfaceNumber</key>
|
||||
<integer>1</integer>
|
||||
<key>idProduct</key>
|
||||
<integer>42705</integer>
|
||||
<key>idVendor</key>
|
||||
<integer>1027</integer>
|
||||
</dict>
|
||||
```
|
||||
|
||||
Reboot again and then type:
|
||||
|
||||
```
|
||||
$ sudo kextload /System/Library/Extensions/FTDIUSBSerialDriver.kext
|
||||
```
|
||||
|
||||
If everything worked, the XDS will be enumerated as
|
||||
`/dev/tty.usbserial-<serial-number>`
|
||||
*/
|
||||
@ -1,5 +1,5 @@
|
||||
/**
|
||||
* @defgroup boards_cc2650_launchpad TI CC2650 LaunchPad XL
|
||||
* @ingroup boards
|
||||
* @brief Texas Instruments SimpleLink(TM) CC2650 Wireless MCU LaunchPad(TM) Kit
|
||||
@defgroup boards_cc2650_launchpad TI CC2650 LaunchPad XL
|
||||
@ingroup boards
|
||||
@brief Texas Instruments SimpleLink(TM) CC2650 Wireless MCU LaunchPad(TM) Kit
|
||||
*/
|
||||
|
||||
219
boards/cc2650stk/doc.txt
Normal file
219
boards/cc2650stk/doc.txt
Normal file
@ -0,0 +1,219 @@
|
||||
/**
|
||||
@defgroup boards_cc2650stk CC2650STK
|
||||
@ingroup boards
|
||||
@brief Support for the SimpleLink™ CC2650 sensor tag
|
||||
|
||||

|
||||
|
||||
The CC2650STK is an 'IoT kit' with 10 sensors, a fancy case, and a radio unit
|
||||
that is capable of irradiating IEEE802.15.4 and BLE (or SMART or whatever they
|
||||
call it now).
|
||||
|
||||
- [Official homepage](http://www.ti.com/tool/cc2650stk)
|
||||
- [Another official homepage](http://www.ti.com/ww/en/wireless_connectivity/sensortag2015)
|
||||
- [Platform](http://www.ti.com/product/CC2650) <- CPU data sheet here
|
||||
|
||||
Use `BOARD=cc2650stk` for building RIOT for this platform.
|
||||
|
||||
## Components
|
||||
|
||||
| MCU | CC2650f128 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | Texas Instruments |
|
||||
| RAM | 20KB |
|
||||
| Flash | 128KB |
|
||||
| Frequency - Standby | 31.26kHz, 32kHz or 32.768kHz |
|
||||
| Frequency - Active / Idle | 48MHz |
|
||||
| RF core | ARM Cortex-M0 CPU, 4KB RAM |
|
||||
| Timers | 4x 32-bit |
|
||||
| ADCs | 1x 12-bit (8 channels) |
|
||||
| UARTs | 2 |
|
||||
| SPIs | 2 |
|
||||
| I2C | 1 |
|
||||
| I2S | 1 |
|
||||
| Datasheet | [Datasheet](http://www.ti.com/lit/ds/symlink/cc2650.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.ti.com/lit/ug/swcu117d/swcu117d.pdf) |
|
||||
|
||||
## Implementation Status
|
||||
|
||||
It's an ongoing process...
|
||||
|
||||
| Module | Status | |
|
||||
|:------------- |:--------------------- |:--------------------- |
|
||||
| Cortex-M3 | Partial support | Missing: energy saving features |
|
||||
| UART | OK | |
|
||||
| LEDS | OK | |
|
||||
| Hardware buttons | OK | |
|
||||
| Timers | Unstable | See [#5631](https://github.com/RIOT-OS/RIOT/issues/5361)|
|
||||
| RF core | Work in progress | See [here](https://github.com/yogo1212/RIOT/tree/cc26x0_rfc). |
|
||||
|
||||
## Toolchains
|
||||
|
||||
The arm-none-eabi toolchain works fine. You can get it
|
||||
[here](https://launchpad.net/gcc-arm-embedded/+download).
|
||||
|
||||
## Programming and Debugging
|
||||
|
||||
You'll need [debugging hardware](http://processors.wiki.ti.com/index.php/CC13xx_CC26xx_Tools_Overview#Debuggers).
|
||||
So far, the [XDS110 debug probe](http://www.ti.com/tool/CC-DEVPACK-DEBUG) has
|
||||
been tested. That bugger requires you to load a firmware onto it each time it
|
||||
powers up. The tool is contained in the Uniflash utility or the `CodeComposer
|
||||
Studio` from TI. Look for a folder called `uscif` in the installation directory,
|
||||
go to the folder `xds110` therein, and follow the instructions in the
|
||||
`ReadMe.txt`.
|
||||
|
||||
The process is relying on proprietary TI softsoftware. If you're on Windows
|
||||
you can use the stuff linked to on the product websites.
|
||||
|
||||
On Linux, there's an application called
|
||||
[Uniflash](http://www.ti.com/tool/uniflash). Sadly, you'll have to install the
|
||||
whole IDE just to get the scripting interface :-[
|
||||
|
||||
No idea about MacOSX.
|
||||
|
||||
In order to flash the CC2650STK you need to plug the XDS110 probe through the
|
||||
JTAG and so-called "DevPack" connectors. Note that the back of the SensorTag
|
||||
case has a removable plastic cut-out: as a result the XDS110 can be used while
|
||||
the CC2650STK is still protected in its case. For the flashing process to be
|
||||
successful, the CC2650STK needs to be powered by a working battery.
|
||||
|
||||
Once your application code has compiled, you need to indicate the path to
|
||||
your UniFlash tool. You can do it in two ways:
|
||||
|
||||
1. Add `export UNIFLASH_PATH = your_path` to
|
||||
`boards/cc2650stk/Makefile.include` and then run `make BOARD=cc2650stk flash`
|
||||
|
||||
2. Use the command `make BOARD=cc2650stk UNIFLASH_PATH=your_path flash` to
|
||||
flash the board.
|
||||
If you're lazy you can create an alias to do it with the following command:
|
||||
`alias cc2650stkmake='make BOARD=cc2650stk UNIFLASH_PATH=your_path flash'`
|
||||
|
||||
In both cases you can add `term` at the end of the `make` command to enter
|
||||
the pyterm console directly. After the board has been flashed, it needs to be
|
||||
manually reset using the reset button on the XDS110 probe.
|
||||
|
||||
***
|
||||
WORK IN PROGRESS
|
||||
***
|
||||
# **Bluetooth Low Energy on the CC2650STK**
|
||||
This section is meant to provide information regarding the BLE specifications
|
||||
as well as their implementation on the CC2650.
|
||||
|
||||
BLE support two main data format: one for advertising channels packets and
|
||||
the other for data channels packets. Both formats will be described in details
|
||||
in the first half of the guide. The second half will provide guidance on how to
|
||||
implement the most common roles of a BLE network.
|
||||
|
||||
References: [BlueTooth Core Specification v4.2](https://www.bluetooth.org/DocMan/handlers/DownloadDoc.ashx?doc_id=286439),
|
||||
[Core Specification Supplement v6](https://www.bluetooth.org/DocMan/handlers/DownloadDoc.ashx?doc_id=302735),
|
||||
[BLE Becons by TI](http://www.ti.com.cn/cn/lit/an/swra475/swra475.pdf)
|
||||
|
||||
## BLE packet format for advertising channels
|
||||
|
||||

|
||||
|
||||
| Field | Size | Definition | Description |
|
||||
|:------------------------|:--------|:------------------|:----------------------|
|
||||
| Preamble | 1 byte | BLE specification | Always 10101010b for advertising channel packets |
|
||||
| Access Address | 4 bytes | BLE specification | Always 0x8E89BED6 for advertising channel packets |
|
||||
| Payload Data Unit (PDU) | 2 to 257 bytes | User defined | Advertising Channel PDU |
|
||||
| CRC | 3 bytes | BLE specification | Result of a polynomial calculated based on the PDU |
|
||||
|
||||
### PDU for advertising channels
|
||||
|
||||
The RF Core will automatically build the PDU based on the content of the
|
||||
radio operation command. The following table describes the format of the PDU for
|
||||
advertising channels, as well as the corresponding variables in the RIOT
|
||||
command.
|
||||
|
||||
```
|
||||
typedef struct __attribute__ ((aligned(4))) {
|
||||
radio_op_command_t ropCmd;
|
||||
uint8_t channel;
|
||||
struct {
|
||||
uint8_t init:7;
|
||||
uint8_t bOverride:1;
|
||||
} whitening;
|
||||
void *pParams; //points toward a structure of type
|
||||
rfc_ble_param_advertiser_t
|
||||
void *pOutput;
|
||||
} ble_rop_cmd_t;
|
||||
```
|
||||
|
||||
| Field | Size | RIOT variable | Description|
|
||||
|:----------------------|:--------|:--------------|:------------------------------------------------------------|
|
||||
| PDU Type | 4 bits | `ropCmd.commandNo` | PDU Type is solely dependant on the command type. See below. |
|
||||
| RFU | 2 bits | - | Reserved for Future Use (RFU): [You can't touch this.](https://www.youtube.com/watch?v=otCpCn0l4Wo) Assumed to be 0.|
|
||||
| TxAdd | 1 bit | `pParams->advConfig.deviceAddrType` | The field value is specific to the PDU type. |
|
||||
| RxAdd | 1 bit | - | The field value is specific to the PDU type. According to the TI documentation ([23.6.4.4](http://www.ti.com/lit/ug/swcu117d/swcu117d.pdf)), this field is not available to configure and thus assumed to be 0. |
|
||||
| Length | 6 bits | `pParams->advLen` + 6| Indicates the length of the payload field in bytes. 6 is added to account for the advertiser address. The payload length ranges from 6 to 37 bytes. |
|
||||
| RFU | 2 bits | - | Reserved for Future Use (RFU): [You can't touch this.](https://www.youtube.com/watch?v=otCpCn0l4Wo) Assumed to be 0 |
|
||||
| Advertiser address | 6 bytes | `pParams->pDeviceAddress` | First element of the payload. The different formats of address types are illustrated [here](https://cloud.githubusercontent.com/assets/14371243/15826564/4c7f5f54-2c08-11e6-8051-dc0a018f6e42.png).|
|
||||
| Advertising data (AD) | 0-31 bytes | `pParams->pAdvData` | Second element of the payload. Warning: if `pParams->advLen=0` the advertiser data are disregarded.|
|
||||
|
||||
As mentioned in the table above, the content of some of the PDU fields are
|
||||
intertwined. These relationships are established in the following tables. Please
|
||||
note that the configuration of the RxAdd is not possible on the CC2650 (RxAdd=0
|
||||
∀ Command No) and thus displayed for information purposes only.
|
||||
|
||||
| Command No | Denomination in BLE specs | Value of PDU Type | Value of TxAdd and RxAdd | Description |
|
||||
|:-----------|:---------------------------|:------------------|:---------------|:------------|
|
||||
| CMD_BLE_ADV | ADV_IND | 0000b | TxAdd: advertiser's address is public (0) or random (1). RxAdd: not defined. | Connectable undirected advertising event |
|
||||
| CMD_BLE_ADV_DIR | ADV_DIRECT_IND | 0001b | TxAdd: advertiser's address is public (0) or random (1). RxAdd: initiator's address is public (0) or random (1). | Connectable directed advertising event |
|
||||
| CMD_BLE_ADV_NC | ADV_NONCONN_IND | 0010b | TxAdd: advertiser's address is public (0) or random (1). RxAdd: not defined. | Non-connectable undirected advertising event |
|
||||
| CMD_BLE_ADV_SCAN | ADV_SCAN_IND | 0110b | TxAdd: advertiser's address is public (0) or random (1). RxAdd: not defined. | Scannable undirected advertising event|
|
||||
|
||||
The Advertising Data (AD) field can be populated with a set of basic data
|
||||
types described in chapter 1 of the [BLE core specification supplement](https://www.bluetooth.com/specifications/adopted-specifications),
|
||||
e.g. service UUID, flags or manufacturer specific data.
|
||||
|
||||
## BLE packet format for data channels
|
||||
|
||||
| Field | Size | Definition | Description |
|
||||
|:------------------------|:--------|:------------------|:----------------------|
|
||||
| Preamble | 1 byte | BLE specification | Equal to 10101010b (LSB of Access Address is 0) or 01010101b (LSB of Access Address is 1) for data channel.|
|
||||
| Access Address | 4 bytes | BLE specification | Randomly generated under constraints. |
|
||||
| Payload Data Unit (PDU) | 2 to 257 bytes | User defined | Data Channel PDU|
|
||||
| CRC | 3 bytes | BLE specification | Result of a polynomial calculated based on the PDU |
|
||||
|
||||
## Configuring a BLE beacon
|
||||
|
||||
In order to configure a BLE beacon, a radio operation command `cmd` of type
|
||||
`ble_rop_cmd_t` must be sent to the RF core.
|
||||
|
||||
1. Define the parameters of the command by filling a structure of type
|
||||
`rfc_ble_param_advertiser_t`. Minimum requirements are as follows:
|
||||
1. Set `params->endTime = 0` and `params->endTrigger.triggerType = 0` unless
|
||||
you want to do something fancy timewise.
|
||||
2. Set `params->pDeviceAddress` to an `unsigned char` array containing the
|
||||
[48-bit MAC address](https://en.wikipedia.org/wiki/MAC_address) of the MCU. The
|
||||
MAC-48 identifier can be obtained from the function `ble_mac48_get()` defined in
|
||||
`cpu/cc26x0/periph/cpuid.c`. This function returns a **public device address**,
|
||||
defined in the factory config data (FCFG->MAC_BLE_n): bits 0-24 contain a serial
|
||||
number unique to the MCU, while the bits 24-48 contain the Organizationally
|
||||
Unique Identifier
|
||||
([OUI](https://en.wikipedia.org/wiki/Organizationally_unique_identifier)) for
|
||||
Texas Instrument, i.e. b0:b4:48.
|
||||
3. Set `params->pAdvData` to a byte array containing the data to be
|
||||
broadcasted. The size of the array must be written as `params->advLen`. Since
|
||||
the advertising packet is non-connectable, the Flag data type (described in
|
||||
[Core Specification Supplement v6](https://www.bluetooth.org/DocMan/handlers/DownloadDoc.ashx?doc_id=302735))
|
||||
may be omitted from the advertising payload.
|
||||
2. Configure the command itself by filling a structure of type
|
||||
`ble_rop_cmd_t`. Minimum requirements are as follows:
|
||||
1. Set `cmd.ropCmd.commandNo = CMDR_CMDID_BLE_ADV_NC`. The PDU type will be
|
||||
set accordingly by the RF core.
|
||||
2. Set `cmd.condition.rule = R_OP_CONDITION_RULE_NEVER` unless you plan on
|
||||
executing an additional command via `cmd.pNextOp`.
|
||||
3. Set `cmd.whitening.bOverride = 0` and `cmd.whitening.init = 0` unless you
|
||||
understand how to use it.
|
||||
4. Set `cmd.pParams` to the address of the `rfc_ble_param_advertiser_t`
|
||||
structure defined in 1).
|
||||
5. Set the advertising channel via `cmd.channel`. There are 3 possible
|
||||
channels, each identified by a `uint8_t`: 37, 38 or 39. If you want to broadcast
|
||||
on all three channels you can create three ble_rop_cmd_t commands and chain them
|
||||
via `cmd.pNextOp`.
|
||||
3. Send the command to be executed to the RF core via the `rfc_send_cmd()`
|
||||
function
|
||||
*/
|
||||
44
boards/chronos/doc.txt
Normal file
44
boards/chronos/doc.txt
Normal file
@ -0,0 +1,44 @@
|
||||
/**
|
||||
@defgroup boards_chronos Chronos
|
||||
@ingroup boards
|
||||
@brief Support for the chronos board
|
||||
|
||||
# Hardware
|
||||
|
||||

|
||||
|
||||
# MCU
|
||||
| MCU | TI CC430F6137 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | MSP430 |
|
||||
| Vendor | Texas Instruments |
|
||||
| Package | 64VQFN |
|
||||
| RAM | 4Kb |
|
||||
| Flash | 32Kb |
|
||||
| Frequency | 20MHz |
|
||||
| FPU | no |
|
||||
| Timers | 2 (2x 16bit) |
|
||||
| ADCs | 1x 8 channel 12-bit |
|
||||
| UARTs | 1 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet / Reference Manual | [Datasheet](http://www.ti.com/lit/gpn/cc430f6137) |
|
||||
| Board Manual | [User Guide](http://www.ti.com/lit/pdf/slau292)|
|
||||
|
||||
## Flashing RIOT
|
||||
|
||||
Flashing RIOT on the eZ430-Chronos is quite straight forward, just connect
|
||||
your eZ430-Chronos using the USB programming dongle to your host computer and
|
||||
type:
|
||||
|
||||
`make flash`
|
||||
|
||||
This should take care of everything!
|
||||
|
||||
# Vendor information
|
||||
|
||||
[TI Wiki](http://processors.wiki.ti.com/index.php/EZ430-Chronos)
|
||||
[MCU information](http://www.ti.com/product/cc430f6137)
|
||||
*/
|
||||
@ -1,16 +1,14 @@
|
||||
/*
|
||||
* Copyright (C) 2017 HAW Hamburg
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @defgroup boards_common Common Board Groups
|
||||
* @ingroup boards
|
||||
* @brief Common definitions and implementations for board groups
|
||||
*
|
||||
* Several boards share many definitions and implementations, these are
|
||||
* collectively stored into a common module per board group.
|
||||
Copyright (C) 2017 HAW Hamburg
|
||||
|
||||
This file is subject to the terms and conditions of the GNU Lesser
|
||||
General Public License v2.1. See the file LICENSE in the top level
|
||||
directory for more details.
|
||||
|
||||
@defgroup boards_common Common Board Groups
|
||||
@ingroup boards
|
||||
@brief Common definitions and implementations for board groups
|
||||
|
||||
Several boards share many definitions and implementations, these are
|
||||
collectively stored into a common module per board group.
|
||||
*/
|
||||
|
||||
5
boards/ek-lm4f120xl/doc.txt
Normal file
5
boards/ek-lm4f120xl/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_ek-lm4f120xl EK-LM4F120XL
|
||||
@ingroup boards
|
||||
@brief Support for the Stellaris Launchpad LM4F120 board
|
||||
*/
|
||||
5
boards/f4vi1/doc.txt
Normal file
5
boards/f4vi1/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_f4vi1 F4VI1
|
||||
@ingroup boards
|
||||
@brief Support for the F4VI1 board
|
||||
*/
|
||||
@ -1,45 +1,45 @@
|
||||
/**
|
||||
* @defgroup boards_feather-m0 Adafruit Feather M0
|
||||
* @ingroup boards
|
||||
* @brief Support for the Adafruit Feather M0.
|
||||
*
|
||||
* ### General information
|
||||
*
|
||||
* Feather M0 boards are development boards shipped by
|
||||
* [Adafruit](https://learn.adafruit.com/adafruit-feather-m0-basic-proto/).
|
||||
*
|
||||
* All the feather M0 boards are built based on the same Atmel SAMD21G18A
|
||||
* microcontroller. See @ref cpu_samd21.
|
||||
*
|
||||
* Several types of Feather M0 boards exist:
|
||||
* * [Feather M0 WiFi](https://learn.adafruit.com/adafruit-feather-m0-wifi-atwinc1500/)
|
||||
* * [Feather M0 BLE](https://learn.adafruit.com/adafruit-feather-m0-bluefruit-le/overview)
|
||||
* * [Feather M0 Adalogger](https://learn.adafruit.com/adafruit-feather-m0-adalogger/)
|
||||
* * [Feather M0 LoRa](https://learn.adafruit.com/adafruit-feather-m0-radio-with-lora-radio-module)
|
||||
*
|
||||
* The different modules used to differenciate the boards (ATWINC1500 WiFi,
|
||||
* Bluefruit LE, SD card, LoRa) are connected via SPI (SPI_DEV(0)) to the
|
||||
* SAMD21 mcu.
|
||||
*
|
||||
* ### Pinout
|
||||
*
|
||||
* <img src="https://cdn-learn.adafruit.com/assets/assets/000/030/921/original/adafruit_products_2772_pinout_v1_0.png"
|
||||
* alt="Adafruit Feather M0 proto pinout" style="width:800px;"/>
|
||||
*
|
||||
* ### Flash the board
|
||||
*
|
||||
* 1. Put the board in bootloader mode by double tapping the reset button.<br/>
|
||||
* When the board is in bootloader mode, the user led (red) oscillates smoothly.
|
||||
*
|
||||
*
|
||||
* 2. Use `BOARD=feather-m0` with the `make` command.<br/>
|
||||
* Example with `hello-world` application:
|
||||
* ```
|
||||
* make BOARD=feather-m0 -C examples/hello-world flash
|
||||
* ```
|
||||
*
|
||||
* ### Accessing STDIO via UART
|
||||
*
|
||||
* To access the STDIO of RIOT, a FTDI to USB converted needs to be plugged to
|
||||
* the RX/TX pins on the board.
|
||||
*/
|
||||
@defgroup boards_feather-m0 Adafruit Feather M0
|
||||
@ingroup boards
|
||||
@brief Support for the Adafruit Feather M0.
|
||||
|
||||
### General information
|
||||
|
||||
Feather M0 boards are development boards shipped by
|
||||
[Adafruit](https://learn.adafruit.com/adafruit-feather-m0-basic-proto/).
|
||||
|
||||
All the feather M0 boards are built based on the same Atmel SAMD21G18A
|
||||
microcontroller. See @ref cpu_samd21.
|
||||
|
||||
Several types of Feather M0 boards exist:
|
||||
* [Feather M0 WiFi](https://learn.adafruit.com/adafruit-feather-m0-wifi-atwinc1500/)
|
||||
* [Feather M0 BLE](https://learn.adafruit.com/adafruit-feather-m0-bluefruit-le/overview)
|
||||
* [Feather M0 Adalogger](https://learn.adafruit.com/adafruit-feather-m0-adalogger/)
|
||||
* [Feather M0 LoRa](https://learn.adafruit.com/adafruit-feather-m0-radio-with-lora-radio-module)
|
||||
|
||||
The different modules used to differenciate the boards (ATWINC1500 WiFi,
|
||||
Bluefruit LE, SD card, LoRa) are connected via SPI (SPI_DEV(0)) to the
|
||||
SAMD21 mcu.
|
||||
|
||||
### Pinout
|
||||
|
||||
<img src="https://cdn-learn.adafruit.com/assets/assets/000/030/921/original/adafruit_products_2772_pinout_v1_0.png"
|
||||
alt="Adafruit Feather M0 proto pinout" style="width:800px;"/>
|
||||
|
||||
### Flash the board
|
||||
|
||||
1. Put the board in bootloader mode by double tapping the reset button.<br/>
|
||||
When the board is in bootloader mode, the user led (red) oscillates smoothly.
|
||||
|
||||
|
||||
2. Use `BOARD=feather-m0` with the `make` command.<br/>
|
||||
Example with `hello-world` application:
|
||||
```
|
||||
make BOARD=feather-m0 -C examples/hello-world flash
|
||||
```
|
||||
|
||||
### Accessing STDIO via UART
|
||||
|
||||
To access the STDIO of RIOT, a FTDI to USB converted needs to be plugged to
|
||||
the RX/TX pins on the board.
|
||||
*/
|
||||
|
||||
136
boards/fox/doc.txt
Normal file
136
boards/fox/doc.txt
Normal file
@ -0,0 +1,136 @@
|
||||
/**
|
||||
@defgroup boards_fox fox
|
||||
@ingroup boards
|
||||
@brief Support for the fox board
|
||||
|
||||
## Components
|
||||
|
||||
| MCU | [ST2M32F103REY](http://www.st.com/web/catalog/mmc/FM141/SC1169/SS1031/LN1565/PF164485) – 32-bits|
|
||||
|-------|-----------------------------------------------------------------------------------------------------|
|
||||
| RAM | 64Kb |
|
||||
| Flash | 512Kb |
|
||||
| radio chipset | [AT86RF231](http://www.atmel.com/images/doc8111.pdf) |
|
||||
| | a IEEE802.15.4-compliant radio at 2.4 GHz |
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | [STM23F103REY](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/reference_manual/CD00171190.pdf) | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | no | |
|
||||
| | UART | full | |
|
||||
| | I2C | yes | |
|
||||
| | SPI | yes | one SPI device for now |
|
||||
| | USB | no | |
|
||||
| | RTT | yes | in progress |
|
||||
| | RNG | no | no HW module |
|
||||
| | Timer | full | |
|
||||
| Radio Chip | AT86RF231 | partly | will be remodelled soon |
|
||||
|
||||
|
||||
##### Note on at86rf231 radio driver
|
||||
|
||||
The current implementation of the radio driver for the at86rf231 chip uses
|
||||
the basic operation modes. This gives
|
||||
you basic sending and receiving functionality but no hardware address
|
||||
filtering and no auto-ACKs etc. Due to the fact this radio device is an IEEE
|
||||
802.15.4 compliant device it supports radio channels from 11 to 26. When trying
|
||||
to set a channel out of range the driver returns an error and prints a message
|
||||
with `DEVELHELP` enabled.
|
||||
|
||||
## Toolchains
|
||||
|
||||
See [ARM Family](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM)
|
||||
|
||||
Working:
|
||||
* [gcc-arm-embedded](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM#gcc-
|
||||
arm-embedded-toolchain)
|
||||
* [gcc-linaro](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM#linaro-
|
||||
toolchain)
|
||||
|
||||
### Programming and Debugging
|
||||
|
||||
In order to program (flash) and debug the node you need
|
||||
[OpenOCD](http://openocd.sourceforge.net/) and an ARM version of gdb (`arm-none-
|
||||
eabi-gdb`), which provided by most toolchains. Most Linux distributions provide
|
||||
also a package for OpenOCD. The required configuration files are provided by
|
||||
RIOT.
|
||||
When starting the debugger with `make debug BOARD=fox` GDB connects to
|
||||
openocd, loads the elf-file and puts the MCU into halt state. Before setting
|
||||
breakpoints it is sometimes needed to use the following workflow
|
||||
```
|
||||
bash
|
||||
monitor reset run
|
||||
monitor reset halt
|
||||
b <breakpoint>
|
||||
c
|
||||
```
|
||||
For best debugging experience also change the `-Os` flag in
|
||||
`Makefile.inlcude`'s `CFLAGS` variable to `-O0`.
|
||||
|
||||
## Debugging
|
||||
|
||||
For debugging you need to open a terminal. Here you simply have to call `make
|
||||
debug` - assuming that the current directory is your application directory. It
|
||||
establishes an openocd connection to the device and starts gdb connected to the
|
||||
openocd instance. For example, it should look something like this
|
||||
```
|
||||
[user@host RIOT]$ cd examples/default/
|
||||
[user@host default]$ BOARD=fox make
|
||||
Building application default for fox w/ MCU stm32f1.
|
||||
...
|
||||
[user@hostdefault]$ BOARD=fox make debug
|
||||
RIOT/boards/hikob-common/dist/debug.sh RIOT/boards/fox/dist/gdb.conf
|
||||
RIOT/examples/default/bin/fox/default.elf
|
||||
Open On-Chip Debugger 0.8.0 (2014-07-27-20:18)
|
||||
Licensed under GNU GPL v2
|
||||
For bug reports, read
|
||||
http://openocd.sourceforge.net/doc/doxygen/bugs.html
|
||||
GNU gdb (GNU Tools for ARM Embedded Processors) 7.4.1.20140401-cvs
|
||||
Copyright (C) 2012 Free Software Foundation, Inc.
|
||||
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
|
||||
This is free software: you are free to change and redistribute it.
|
||||
There is NO WARRANTY, to the extent permitted by law. Type "show copying"
|
||||
and "show warranty" for details.
|
||||
This GDB was configured as "--host=x86_64-apple-darwin10 --target=arm-none-
|
||||
eabi".
|
||||
For bug reporting instructions, please see:
|
||||
<http://www.gnu.org/software/gdb/bugs/>...
|
||||
Reading symbols from RIOT/examples/default/bin/fox/default.elf...done.
|
||||
idle_thread (arg=<optimized out>) at RIOT/core/kernel_init.c:67
|
||||
67 lpm_set(LPM_IDLE);
|
||||
JTAG tap: stm32f1x.cpu tap/device found: 0x3ba00477 (mfg: 0x23b, part:
|
||||
0xba00, ver: 0x3)
|
||||
JTAG tap: stm32f1x.bs tap/device found: 0x06414041 (mfg: 0x020, part: 0x6414,
|
||||
ver: 0x0)
|
||||
target state: halted
|
||||
target halted due to debug-request, current mode: Thread
|
||||
xPSR: 0x01000000 pc: 0x0800027c msp: 0x20002200
|
||||
Loading section .text, size 0x6df4 lma 0x8000000
|
||||
Loading section .ARM.exidx, size 0x8 lma 0x8006df4
|
||||
Loading section .relocate, size 0x120 lma 0x8006dfc
|
||||
Start address 0x8000000, load size 28444
|
||||
Transfer rate: 11 KB/sec, 7111 bytes/write.
|
||||
(gdb) c
|
||||
Continuing.
|
||||
```
|
||||
|
||||
The node will reboot and you can continue to use `gdb` like you're used to.
|
||||
In some cases it
|
||||
seems necessary to prepend a `monitor reset run` before executing continue.
|
||||
In general you can
|
||||
use openocd commands prepended by `monitor`.
|
||||
In the case the node crashes it can be reseted with the following sequence
|
||||
```
|
||||
Bash
|
||||
(gdb) monitor reset halt
|
||||
(gdb) monitor reset run
|
||||
```
|
||||
|
||||
## Troubleshooting
|
||||
|
||||
For terminal output on OS X (`make term`) you need to install a driver:
|
||||
http://www.ftdichip.com/Drivers/VCP.htm
|
||||
http://www.ftdichip.com/Drivers/VCP.htm
|
||||
*/
|
||||
5
boards/frdm-k22f/doc.txt
Normal file
5
boards/frdm-k22f/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_frdm-k22f NXP FRDM-K22F Board
|
||||
@ingroup boards
|
||||
@brief Support for the NXP FRDM-K22F
|
||||
*/
|
||||
102
boards/frdm-k64f/doc.txt
Normal file
102
boards/frdm-k64f/doc.txt
Normal file
@ -0,0 +1,102 @@
|
||||
/**
|
||||
@defgroup boards_frdm-k64f NXP FRDM-K64F Board
|
||||
@ingroup boards
|
||||
@brief Support for the NXP FRDM-K64F
|
||||
|
||||
## Overview
|
||||
The board has a K64F Kinetis MCU and is supported by `cpu/kinetis_common`.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
| MCU | MK64FN1M0VLL12 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4F |
|
||||
| Vendor | Freescale |
|
||||
| RAM | 256Kb |
|
||||
| Flash | 1024Kb |
|
||||
| Frequency | 120MHz |
|
||||
| FPU | yes |
|
||||
| Timers | yes |
|
||||
| ADCs | yes |
|
||||
| UARTs | yes |
|
||||
| SPIs | yes |
|
||||
| I2Cs | yes |
|
||||
| Ethernet | WIP |
|
||||
| USB | WIP |
|
||||
| LPM | TODO |
|
||||
| DAC | TODO |
|
||||
| Vcc | TODO |
|
||||
| Reference Manual | TODO |
|
||||
|
||||
The board has an integrated debuger adapter (k20dx128) with the firmware from
|
||||
ARMmbed.
|
||||
There are three interfaces available:
|
||||
* Drag-n-drop programming over Mass Storage Device
|
||||
* USB Serial Port (/dev/ttyACMx) connected to a K64F UART interface
|
||||
* CMSIS-DAP for debugging with e.g. OpenOCD
|
||||
|
||||
**Please update the firmware to version 0221, see below.**
|
||||
|
||||
## OpenOCD
|
||||
The latest (01.07.2015) OpenOCD version (also current git) does not support
|
||||
the K64F. There is a [patch](http://openocd.zylin.com/#/c/2773/) which makes
|
||||
flashing and debugging possible. A refactored and rebased version can be found
|
||||
[here](https://github.com/jfischer-phytec-iot/openocd/tree/wip%40phytec).<br>
|
||||
|
||||
## Flashing the Device
|
||||
#### Over OpenOCD
|
||||
make BOARD=frdm-k64f flash
|
||||
|
||||
#### Over MSD
|
||||
Simply mount the mbed Mass Storage Device und copy new RIOT firmware.
|
||||
See also the ARMmbed
|
||||
[instructions](https://developer.mbed.org/platforms/FRDM-K64F/#getting-started-
|
||||
with-mbed).
|
||||
|
||||
## Updating the Booloader
|
||||
A update of CMSIS-DAP firmware is necessary to using the board with OpenOCD.
|
||||
A good step by step guide is available
|
||||
[here](https://developer.mbed.org/handbook/Firmware-FRDM-K64F).
|
||||
|
||||
## I can't flash the device with OpenOCD anymore...
|
||||
When a flash process has failed or a wrong firmware has been programmed, the
|
||||
following OpenOCD message may appear:
|
||||
```
|
||||
START...
|
||||
Info : SWD IDCODE 0x2ba01477
|
||||
Info : SWD IDCODE 0x2ba01477
|
||||
Error: Failed to read memory at 0xe000ed00
|
||||
Examination failed, GDB will be halted. Polling again in 300ms
|
||||
TargetName Type Endian TapName State
|
||||
-- ------------------ ---------- ------ ------------------ ------------
|
||||
0* k64f.cpu cortex_m little k64f.cpu unknown
|
||||
START...
|
||||
Warn : *********** ATTENTION! ATTENTION! ATTENTION! ATTENTION! **********
|
||||
Warn : **** ****
|
||||
Warn : **** Your Kinetis MCU is in secured state, which means that, ****
|
||||
Warn : **** with exception for very basic communication, JTAG/SWD ****
|
||||
Warn : **** interface will NOT work. In order to restore its ****
|
||||
Warn : **** functionality please issue 'kinetis mdm mass_erase' ****
|
||||
Warn : **** command, power cycle the MCU and restart OpenOCD. ****
|
||||
Warn : **** ****
|
||||
Warn : *********** ATTENTION! ATTENTION! ATTENTION! ATTENTION! **********
|
||||
in procedure 'reset'
|
||||
in procedure 'ocd_bouncer'
|
||||
```
|
||||
Solution 1:
|
||||
+ Hold the reset button and execute make BOARD=frdm-k64f flash in a project
|
||||
directory
|
||||
+ Release reset button just after "Info : MDM: Chip is unsecured.
|
||||
Continuing."
|
||||
|
||||
Solution 2:
|
||||
+ Comment out line `reset_config srst_only srst_nogate connect_assert_srst`
|
||||
in `boards/frdm-k64f/dist/openocd.cfg`
|
||||
+ Execute make BOARD=frdm-k64f flash in a project directory
|
||||
|
||||
Solution 3:
|
||||
+ Ask Deep Thought
|
||||
*/
|
||||
5
boards/ikea-tradfri/doc.txt
Normal file
5
boards/ikea-tradfri/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_ikea-tradfri IKEA TRÅDFRI modules
|
||||
@ingroup boards
|
||||
@brief Support for the IKEA TRÅDFRI modules
|
||||
*/
|
||||
5
boards/iotlab-a8-m3/doc.txt
Normal file
5
boards/iotlab-a8-m3/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_iotlab-a8-m3 IoT-LAB A8 M3 open node
|
||||
@ingroup boards
|
||||
@brief Support for iotlab-m3 board.
|
||||
*/
|
||||
163
boards/iotlab-m3/doc.txt
Normal file
163
boards/iotlab-m3/doc.txt
Normal file
@ -0,0 +1,163 @@
|
||||
/**
|
||||
@defgroup boards_iotlab-m3 IoT-LAB M3 open node
|
||||
@ingroup boards
|
||||
@brief Support for the iotlab-m3 board
|
||||
|
||||
## Components
|
||||
|
||||
| MCU | [ST2M32F103REY](http://www.st.com/web/catalog/mmc/FM141/SC1169/SS1031/LN1565/PF164485) – 32-bits, 64kB RAM |
|
||||
|-------|-------------------------------------------------------------------------------------------------------------------|
|
||||
|sensors | Light ([ISL29020](http://www.intersil.com/en/products/optoelectronics/ambient-light-sensors/light-to-digital-sensors/ISL29020.html)) |
|
||||
| | Pressure ([LPS331AP](http://www.st.com/web/catalog/sense_power/FM89/SC1316/PF251601)) |
|
||||
| | Tri-axis accelerometer/magnetometer ([LSM303DLHC](http://www.st.com/web/catalog/sense_power/FM89/SC1449/PF251940)) |
|
||||
| | Tri-axis gyrometer ([L3G4200D](http://www.st.com/web/catalog/sense_power/FM89/SC1288/PF250373)) |
|
||||
| external memory | 128 Mbits external Nor flash ([N25Q128A13E1240F](http://www.datasheet4u.com/download.php?id=683085)) |
|
||||
| power | 3,7V LiPo battery – 650 mAh ([063040](http://www.gmbattery.com/Datasheet/LIPO/LIPO-063040.pdf)) |
|
||||
| radio chipset | [AT86RF231](http://www.atmel.com/images/doc8111.pdf) |
|
||||
| | a IEEE802.15.4-compliant radio at 2.4 GHz |
|
||||
|
||||
## Board HW overview
|
||||
|
||||

|
||||
|
||||
### Board Architecture
|
||||
|
||||

|
||||
|
||||
### [Board schematics](http://github.com/iot-lab/iot-lab/wiki/Docs/openm3-schematics.pdf)
|
||||
, wiring, pinouts, etc...
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | [STM23F103REY](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/reference_manual/CD00171190.pdf) | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | no | #4227|
|
||||
| | UART | yes | |
|
||||
| | I2C | yes | |
|
||||
| | SPI | yes | |
|
||||
| | USB | no | |
|
||||
| | RTT | yes | |
|
||||
| | Timer | yes | |
|
||||
| Radio Chip | AT86RF231 | yes | |
|
||||
| Accelerometer | L3G4200D | yes | |
|
||||
| Magnetometer | L3G4200D | yes | |
|
||||
| Gyroscope | LSM303DLHC | yes | |
|
||||
| Pressure Sensor | LPS331AP | yes | |
|
||||
| Light Sensor | ISL29020 | yes | |
|
||||
|
||||
## Toolchains
|
||||
|
||||
See [ARM Family](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM)
|
||||
|
||||
Working:
|
||||
* [gcc-arm-embedded](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM#gcc-
|
||||
arm-embedded-toolchain)
|
||||
* [gcc-linaro](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM#linaro-
|
||||
toolchain)
|
||||
|
||||
### Programming and Debugging
|
||||
|
||||
In order to program (flash) and debug the node you need
|
||||
[OpenOCD](http://openocd.sourceforge.net/) and an ARM version of gdb (`arm-none-
|
||||
eabi-gdb`), which provided by most toolchains. Most Linux distributions provide
|
||||
also a package for OpenOCD. The required configuration files are provided by
|
||||
RIOT.
|
||||
When starting the debugger with `make debug BOARD=iotlab-m3` GDB connects to
|
||||
openocd, loads the elf-file and puts the MCU into halt state. Befor setting
|
||||
breakpoints it is sometimes needed to use the following workflow
|
||||
```
|
||||
bash
|
||||
monitor reset run
|
||||
monitor reset halt
|
||||
b <breakpoint>
|
||||
c
|
||||
```
|
||||
For best debugging experience also change the `-Os` flag in
|
||||
`Makefile.inlcude`'s `CFLAGS` variable to `-O0`.
|
||||
|
||||
## Details
|
||||
The M3 Open Node can reset, debug and program the STM32 on JTAG through the
|
||||
FTDI2322H connected to the USB. This component allows also a UART link to the
|
||||
STM32. The Open Node connector gives access to 3 STM32/GPIO and the STM32/I2C.
|
||||
Two power lines are accessible on this connector:
|
||||
* a + 5.0 volts for the board power supply
|
||||
* a 3.3 volts for the consumption monitoring of the STM32, the RF component
|
||||
and the sensors
|
||||
|
||||
The M3 Open Node can be used standalone without a gateway connected to the M3
|
||||
Open node connector. The powering of the board is then assumed by a battery or
|
||||
by the USB connector The choice of the power input is done electronically
|
||||
(power management).
|
||||
|
||||

|
||||
|
||||
## Debugging
|
||||
|
||||
For debugging you need to open a terminal. Here you simply have to call `make
|
||||
debug` - assuming that the current directory is your application directory. It
|
||||
establishes an openocd connection to the device and starts gdb connected to the
|
||||
openocd instance. For example, it should look something like this
|
||||
```
|
||||
[user@host RIOT]$ cd examples/default/
|
||||
[user@host default]$ BOARD=iotlab-m3 make
|
||||
Building application default for iotlab-m3 w/ MCU stm32f1.
|
||||
...
|
||||
[user@hostdefault]$ BOARD=iotlab-m3 make debug
|
||||
RIOT/boards/hikob-common/dist/debug.sh RIOT/boards/iotlab-m3/dist/gdb.conf
|
||||
RIOT/examples/default/bin/iotlab-m3/default.elf
|
||||
Open On-Chip Debugger 0.8.0 (2014-07-27-20:18)
|
||||
Licensed under GNU GPL v2
|
||||
For bug reports, read
|
||||
http://openocd.sourceforge.net/doc/doxygen/bugs.html
|
||||
GNU gdb (GNU Tools for ARM Embedded Processors) 7.4.1.20140401-cvs
|
||||
Copyright (C) 2012 Free Software Foundation, Inc.
|
||||
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
|
||||
This is free software: you are free to change and redistribute it.
|
||||
There is NO WARRANTY, to the extent permitted by law. Type "show copying"
|
||||
and "show warranty" for details.
|
||||
This GDB was configured as "--host=x86_64-apple-darwin10 --target=arm-none-
|
||||
eabi".
|
||||
For bug reporting instructions, please see:
|
||||
<http://www.gnu.org/software/gdb/bugs/>...
|
||||
Reading symbols from RIOT/examples/default/bin/iotlab-m3/default.elf...done.
|
||||
idle_thread (arg=<optimized out>) at RIOT/core/kernel_init.c:67
|
||||
67 lpm_set(LPM_IDLE);
|
||||
JTAG tap: stm32f1x.cpu tap/device found: 0x3ba00477 (mfg: 0x23b, part:
|
||||
0xba00, ver: 0x3)
|
||||
JTAG tap: stm32f1x.bs tap/device found: 0x06414041 (mfg: 0x020, part: 0x6414,
|
||||
ver: 0x0)
|
||||
target state: halted
|
||||
target halted due to debug-request, current mode: Thread
|
||||
xPSR: 0x01000000 pc: 0x0800027c msp: 0x20002200
|
||||
Loading section .text, size 0x6df4 lma 0x8000000
|
||||
Loading section .ARM.exidx, size 0x8 lma 0x8006df4
|
||||
Loading section .relocate, size 0x120 lma 0x8006dfc
|
||||
Start address 0x8000000, load size 28444
|
||||
Transfer rate: 11 KB/sec, 7111 bytes/write.
|
||||
(gdb) c
|
||||
Continuing.
|
||||
```
|
||||
|
||||
The node will reboot and you can continue to use `gdb` like you're used to.
|
||||
In some cases it
|
||||
seems necessary to prepend a `monitor reset run` before executing continue.
|
||||
In general you can
|
||||
use openocd commands prepended by `monitor`.
|
||||
In the case the node crashes it can be reseted with the following sequence
|
||||
```
|
||||
Bash
|
||||
(gdb) monitor reset halt
|
||||
(gdb) monitor reset run
|
||||
```
|
||||
|
||||
## Troubleshooting
|
||||
|
||||
For terminal output on OS X (`make term`) you need to install a driver:
|
||||
http://www.ftdichip.com/Drivers/VCP.htm
|
||||
http://www.ftdichip.com/Drivers/VCP.htm
|
||||
*/
|
||||
85
boards/limifrog-v1/doc.txt
Normal file
85
boards/limifrog-v1/doc.txt
Normal file
@ -0,0 +1,85 @@
|
||||
/**
|
||||
@defgroup boards_limifrog-v1 LimiFrog Version 1
|
||||
@ingroup boards
|
||||
@brief Support for the limifrog-v1 board
|
||||
|
||||
## Overview
|
||||
LimiFrog-v1 arose from the La BlueFrog board. LimiFrog-v1 contains the first
|
||||
hardware revision of that kickstarter project. LimiFrog-v2 is already there and
|
||||
the RIOT support will follow. [LimiFrog](http://www.limifrog.io/home-en-
|
||||
kickstarter/) features a variety of sensors as well as an OLED Display and a BLE
|
||||
(Bluetooth Low-Energy) module.
|
||||
|
||||
## Hardware
|
||||

|
||||
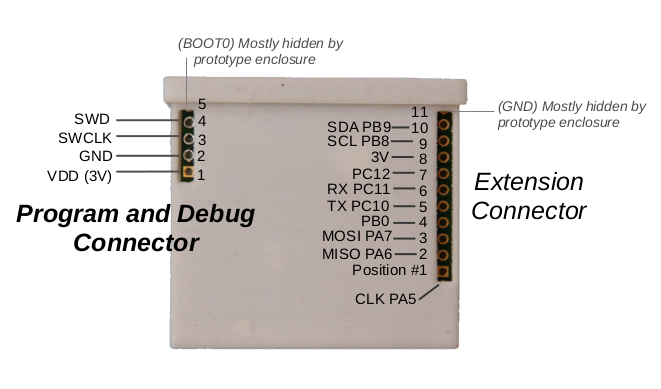
|
||||
|
||||
### MCU
|
||||
| MCU | STM32L151RC |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | 32MHz (no external oscilator connected) |
|
||||
| FPU | no |
|
||||
| Timers | 8 (8x 16-bit, 1x 32-bit [TIM5]) |
|
||||
| ADCs | 1x 42-channel 12-bit |
|
||||
| UARTs | 3 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| Vcc | 1.65V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00048356.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/CD00240193.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/CD00228163.pdf) |
|
||||
|
||||
## User Inferface
|
||||
|
||||
2 Buttons:
|
||||
|
||||
| PIN |
|
||||
|:----- |
|
||||
| PA15 (IN) |
|
||||
| PC8 (IN) |
|
||||
|
||||
1 LED:
|
||||
|
||||
| NAME | LED_RED|
|
||||
| ----- | ----- |
|
||||
| Color | red |
|
||||
| Pin | PC3 |
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32L151RC | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes | |
|
||||
| | UART | yes | |
|
||||
| | I2C | yes | |
|
||||
| | SPI | yes | |
|
||||
| | Timer | yes | |
|
||||
| Ambient Light Sensor| ST VL6180X | no | planned|
|
||||
| Accelerometer | ST LSM6DS3 | no | planned |
|
||||
| Magnetometer | ST LIS3MDL | no | planned |
|
||||
| Gyroscope | ST LSM6DS3 | no | planned |
|
||||
| atmospheric pressure (and altitude) sensor | ST SLPS25H | no | planned |
|
||||
| Microphone | Knowles SPU0414HR5H-SB | no | planned |
|
||||
| OLED Display | Densitron DD-160128FC-1A | no | planned |
|
||||
| BLE | Panasonic PAN1740 | no | planned |
|
||||
|
||||
## Flashing and Debugging the device
|
||||
|
||||
The LimiFrog-v1 has no on-board programmer nor an USB-UART converter. It can
|
||||
be programmed by using the integrated ST-Link/V2 programmer of any STM32Fx-
|
||||
discovery board. See Hardware section [here](@ref boards_yunjia-nrf51822) for an example.
|
||||
Another way is to use a stand-alone ST-Link V2 programmer as shown in the
|
||||
picture.
|
||||
|
||||
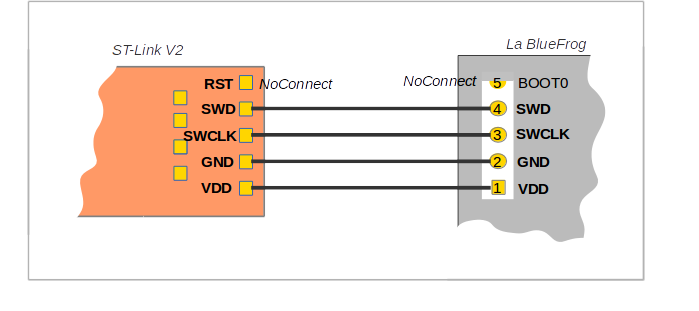
|
||||
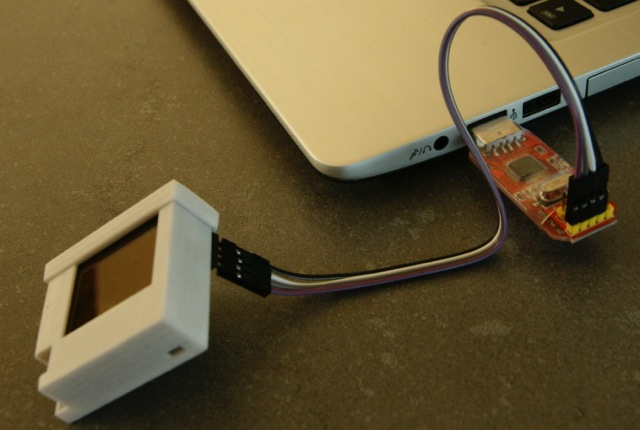
|
||||
|
||||
To debug the device you may also want to use a stand-alone UART converter and
|
||||
connect it to the pins PC10 and PC11 and keep the programmer plugged.
|
||||
*/
|
||||
5
boards/maple-mini/doc.txt
Normal file
5
boards/maple-mini/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_maple-mini maple-mini
|
||||
@ingroup boards
|
||||
@brief Support for the maple-mini board
|
||||
*/
|
||||
26
boards/mbed_lpc1768/doc.txt
Normal file
26
boards/mbed_lpc1768/doc.txt
Normal file
@ -0,0 +1,26 @@
|
||||
/**
|
||||
@defgroup boards_mbed_lpc1768 mbed LPC1768 development kit
|
||||
@ingroup boards
|
||||
@brief Support for the mbed LPC1762 board
|
||||
|
||||
# Overview
|
||||
|
||||
*missing*
|
||||
|
||||
# Hardware
|
||||
| MCU | LPC1768 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | NXP |
|
||||
| RAM | 64kB SRAM |
|
||||
| Flash | 512kB |
|
||||
| Frequency | up to 100MHz |
|
||||
| Datasheet | [Datasheet](http://www.nxp.com/documents/data_sheet/LPC1769_68_67_66_65_64_63.pdf) |
|
||||
| User Manual | [User Manual](http://www.nxp.com/documents/user_manual/UM10360.pdf)|
|
||||
|
||||
*missing*
|
||||
|
||||
# Known Issues
|
||||
* Does not compile with the mentor graphics toolchain (compare
|
||||
https://github.com/RIOT-OS/RIOT/issues/751)
|
||||
*/
|
||||
@ -1,37 +1,37 @@
|
||||
/**
|
||||
* @defgroup boards_mega-xplained Mega1284P-Xplained
|
||||
* @ingroup boards
|
||||
* @brief Support for the Mega1284P-Xplained board.
|
||||
*
|
||||
* ### General information
|
||||
*
|
||||
* The [Mega1284P-Xplained](http://www.microchip.com/DevelopmentTools/ProductDetails.aspx?PartNO=atmega1284p-xpld)
|
||||
* is an evaluation kit by Atmel (now Microchip) for their ATmega1284P microcontroller.
|
||||
*
|
||||
* ### Flash the board
|
||||
*
|
||||
* 1. The board may be flashed through JTAG or using a SPI ISP programmer. If
|
||||
* the Buspirate is being used, then `make flash` can be used to flash the
|
||||
* board:
|
||||
* ```
|
||||
* make BOARD=mega-xplained -C examples/hello-world flash
|
||||
* ```
|
||||
*
|
||||
* 2. The default fuse settings must also be changed.<br/>
|
||||
* If using the Buspirate:
|
||||
* ```
|
||||
* avrdude -p m1284p -c buspirate -P /dev/ttyUSB0 -U efuse:w:0xFF:m
|
||||
* avrdude -p m1284p -c buspirate -P /dev/ttyUSB0 -U hfuse:w:0x99:m
|
||||
* avrdude -p m1284p -c buspirate -P /dev/ttyUSB0 -U lfuse:w:0xE2:m
|
||||
* ```
|
||||
* WARNING: setting the fuses incorrectly can brick your board!
|
||||
*
|
||||
* ### Accessing STDIO via UART
|
||||
*
|
||||
* STDIO can be accessed through the USB connector. The on-board UART-USB
|
||||
* adapter is not affected by flashing. It shows up as /dev/ttyACM0 on Linux.
|
||||
* It will be used automatically with `make term`:
|
||||
* ```
|
||||
* make BOARD=mega-xplained -C examples/hello-world term
|
||||
* ```
|
||||
@defgroup boards_mega-xplained Mega1284P-Xplained
|
||||
@ingroup boards
|
||||
@brief Support for the Mega1284P-Xplained board.
|
||||
|
||||
### General information
|
||||
|
||||
The [Mega1284P-Xplained](http://www.microchip.com/DevelopmentTools/ProductDetails.aspx?PartNO=atmega1284p-xpld)
|
||||
is an evaluation kit by Atmel (now Microchip) for their ATmega1284P microcontroller.
|
||||
|
||||
### Flash the board
|
||||
|
||||
1. The board may be flashed through JTAG or using a SPI ISP programmer. If
|
||||
the Buspirate is being used, then `make flash` can be used to flash the
|
||||
board:
|
||||
```
|
||||
make BOARD=mega-xplained -C examples/hello-world flash
|
||||
```
|
||||
|
||||
2. The default fuse settings must also be changed.<br/>
|
||||
If using the Buspirate:
|
||||
```
|
||||
avrdude -p m1284p -c buspirate -P /dev/ttyUSB0 -U efuse:w:0xFF:m
|
||||
avrdude -p m1284p -c buspirate -P /dev/ttyUSB0 -U hfuse:w:0x99:m
|
||||
avrdude -p m1284p -c buspirate -P /dev/ttyUSB0 -U lfuse:w:0xE2:m
|
||||
```
|
||||
WARNING: setting the fuses incorrectly can brick your board!
|
||||
|
||||
### Accessing STDIO via UART
|
||||
|
||||
STDIO can be accessed through the USB connector. The on-board UART-USB
|
||||
adapter is not affected by flashing. It shows up as /dev/ttyACM0 on Linux.
|
||||
It will be used automatically with `make term`:
|
||||
```
|
||||
make BOARD=mega-xplained -C examples/hello-world term
|
||||
```
|
||||
*/
|
||||
|
||||
80
boards/microbit/doc.txt
Normal file
80
boards/microbit/doc.txt
Normal file
@ -0,0 +1,80 @@
|
||||
/**
|
||||
@defgroup boards_microbit BBC micro:bit
|
||||
@ingroup boards
|
||||
@brief Support for the BBC micro:bit
|
||||
|
||||
## Overview
|
||||
|
||||
The [micro:bit](https://www.microbit.co.uk/) was designed by the BBC and
|
||||
released in 2015. The boards was distributed to all 11-12 year old children
|
||||
throughout the UK.
|
||||
|
||||
The board is based on the Nordic nRF51822 SoC, featuring 16Kb of RAM, 256Kb
|
||||
of ROM, and a 2.4GHz radio, that supports Bluetooth Low Energy (BLE) as well as
|
||||
a Nordic proprietary radio mode.
|
||||
|
||||
Additionally the boards features 2 buttons, a 5x5 LED matrix, a MAG3110
|
||||
3-axis magnetometer, and a MMA8653 3-axis accelerometer.
|
||||
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
| MCU | NRF51822QFAA |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0 |
|
||||
| Vendor | Nordic Semiconductor |
|
||||
| RAM | 16Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | 16MHz |
|
||||
| FPU | no |
|
||||
| Timers | 3 (2x 16-bit, 1x 32-bit [TIMER0]) |
|
||||
| ADCs | 1x 10-bit (8 channels) |
|
||||
| UARTs | 1 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| Vcc | 1.8V - 3.6V |
|
||||
| Reference Manual | [Reference Manual](http://infocenter.nordicsemi.com/pdf/nRF51_RM_v3.0.pdf) |
|
||||
|
||||
|
||||
## Flashing and Debugging
|
||||
|
||||
There are two possibilities to flash the board: using the default ARM DAPLink
|
||||
or you can flash the board using Segger's JLink.
|
||||
|
||||
### DAPLink
|
||||
|
||||
The [DAPLink interface](https://www.mbed.com/en/development/hardware/prototyping-production/daplink/daplink-on-kl26z/) is the default way to flash the board and
|
||||
works out of the box. When you plug the board to your host computer, it shows up
|
||||
as a flash drive. To flash the board, you can simply copy your compiled `.hex`
|
||||
file onto the board, and thats it.
|
||||
|
||||
The `micro:bit` port comes with a little script that does this automatically,
|
||||
so you can flash the board as usual with
|
||||
```
|
||||
bash
|
||||
make flash
|
||||
```
|
||||
|
||||
The DAPLink interface provides however not means for debugging the board.
|
||||
|
||||
### JLink
|
||||
|
||||
Recently, Segger released a JLink firmware for the interface MCU on the
|
||||
`micro:bit`. You have to follow [these instructions](https://www.segger.com/bbc-micro-bit.html) to flash the JLink firmware on your `micro:bit`. Don't worry,
|
||||
the process is very simple and you can revert the firmware back to the DAPLink
|
||||
default anytime ([as described here](https://www.mbed.com/en/development/hardware/prototyping-production/daplink/daplink-on-kl26z/)).
|
||||
|
||||
Once you have flashed the JLink firmware, you can flash the board like this:
|
||||
```
|
||||
bash
|
||||
FLASHTOOL=jlink make flash
|
||||
```
|
||||
|
||||
With the JLink firmware, you can now also do in-circuit debugging etc.
|
||||
|
||||
**Note: The current version of the JLink firmware
|
||||
(JLink_OB_BBC_microbit_16-07-29.hex) does not support any serial port over USB,
|
||||
so you can not use the RIOT shell with this firmware.**
|
||||
*/
|
||||
5
boards/mips-malta/doc.txt
Normal file
5
boards/mips-malta/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_mips-malta MIPS MALTA
|
||||
@ingroup boards
|
||||
@brief Support for the MIPS Malta FPGA system
|
||||
*/
|
||||
5
boards/msb-430/doc.txt
Normal file
5
boards/msb-430/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_msb430 MSB-430
|
||||
@ingroup boards
|
||||
@brief Support for the ScatterWeb MSB-430 board
|
||||
*/
|
||||
62
boards/msb-430h/doc.txt
Normal file
62
boards/msb-430h/doc.txt
Normal file
@ -0,0 +1,62 @@
|
||||
/**
|
||||
@defgroup boards_msb430h MSB-430H
|
||||
@ingroup boards
|
||||
@brief Support for the ScatterWeb MSB-430H board
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
## MCU
|
||||
| MCU | TI MSP430F1612 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | MSP430 |
|
||||
| Vendor | Texas Instruments |
|
||||
| Package | 64 QFN |
|
||||
| RAM | 5Kb |
|
||||
| Flash | 55Kb |
|
||||
| Frequency | 8MHz |
|
||||
| FPU | no |
|
||||
| Timers | 2 (2x 16bit) |
|
||||
| ADCs | 1x 8 channel 12-bit |
|
||||
| UARTs | 2 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet / Reference Manual | [Datasheet](http://www.mi.fu-berlin.de/inf/groups/ag-tech/projects/Z_Finished_Projects/ScatterWeb/moduleComponents/msp430f1612.pdf?1346661398) |
|
||||
| User Guide | [User Guide](http://www.mi.fu-berlin.de/inf/groups/ag-tech/projects/Z_Finished_Projects/ScatterWeb/moduleComponents/MSP430slau049f.pdf?1346661398)|
|
||||
|
||||
## Radio
|
||||
|
||||
| RF Chip | Texas Instruments® CC1100 |
|
||||
|:-------------------- |:------------------------- |
|
||||
| Frequency Band | 300-348MHz, 400-464 MHz, and 800-928 MHz |
|
||||
| Standard compliance | DASH7 compliant |
|
||||
| Receive Sensitivity | -94dBm typ |
|
||||
| Transfer Rate | 500kBaud |
|
||||
| RF Power | -30dBm ~ 10dBm |
|
||||
| Current Draw | RX: 14.4mA TX: 16.9mA Sleep mode: 400nA |
|
||||
| RF Power Supply | 2.1V ~ 3.6V |
|
||||
| Antenna | Dipole Antenna / PCB Antenna |
|
||||
| Datasheet | [Datasheet](http://www.ti.com/lit/gpn/cc1100) |
|
||||
|
||||
## Flashing RIOT
|
||||
|
||||
Flashing RIOT on the MSB-430H is quite straight forward, just connect your
|
||||
board using a JTAG adapter (either the original one from TI or an [Olimex
|
||||
version](https://www.olimex.com/Products/MSP430/JTAG/)) to your host computer
|
||||
and type:
|
||||
|
||||
`make flash`
|
||||
|
||||
This should take care of everything!
|
||||
|
||||
## Using the shell
|
||||
|
||||
The shell is using the UART interface of the MSB-430H at 115200 baud. You
|
||||
need a 3.3V TTL serial cable. For USB connections you could use a [FTDI connector](http://apple.clickandbuild.com/cnb/shop/ftdichip?productID=53&op=catalogue-product_info-null&prodCategoryID=105)
|
||||
|
||||
## More information
|
||||
|
||||
[FU Berlin info page on the MSB-430H](http://www.mi.fu-berlin.de/inf/groups/ag-tech/projects/Z_Finished_Projects/ScatterWeb/modules/mod_MSB-430H.html)
|
||||
*/
|
||||
71
boards/msba2/doc.txt
Normal file
71
boards/msba2/doc.txt
Normal file
@ -0,0 +1,71 @@
|
||||
/**
|
||||
@defgroup boards_msba2 MSB-A2
|
||||
@ingroup boards
|
||||
@brief Support for the ScatterWeb MSB-A2 board
|
||||
|
||||
## Overview
|
||||
|
||||

|
||||
|
||||
|
||||
## Hardware
|
||||
|
||||
| MCU: | LPC2387 ARM7-TDMI |
|
||||
|------|-------------------|
|
||||
| RAM: | 96kb |
|
||||
| Flash: | 512kb |
|
||||
|
||||
|
||||
# More info
|
||||
|
||||
## Board Schematics
|
||||
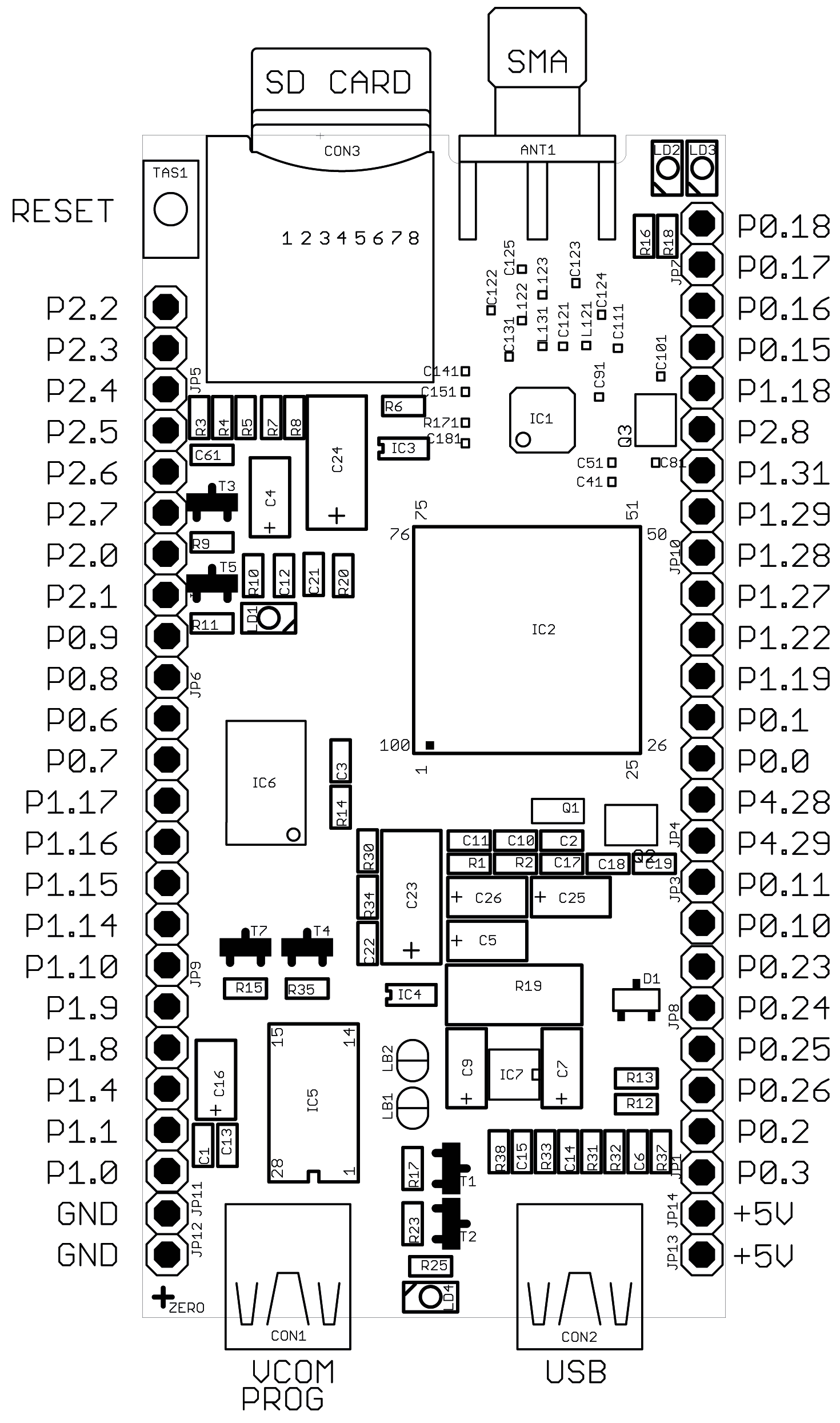
|
||||
|
||||
## Circuit Diagrams
|
||||
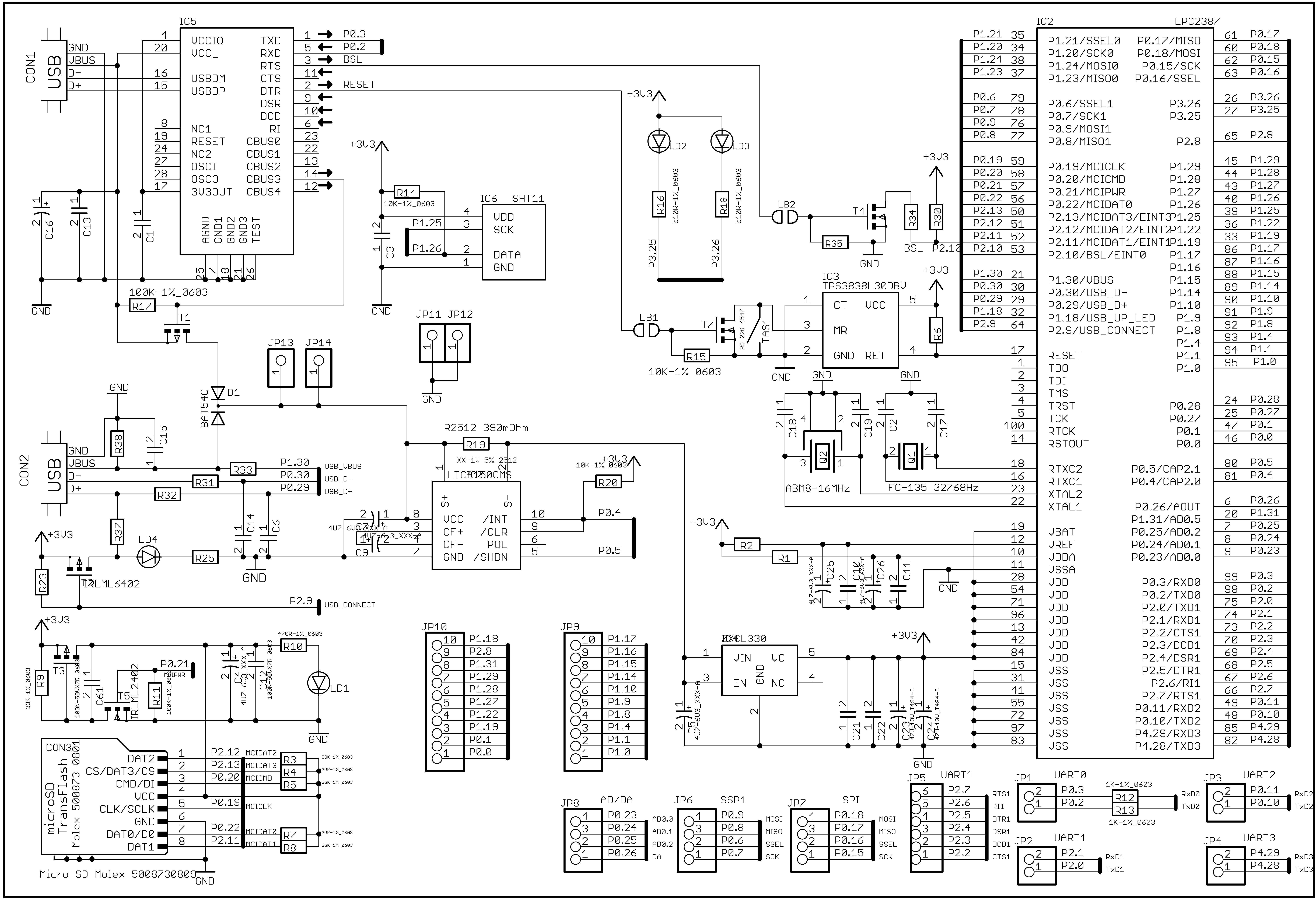
|
||||
|
||||
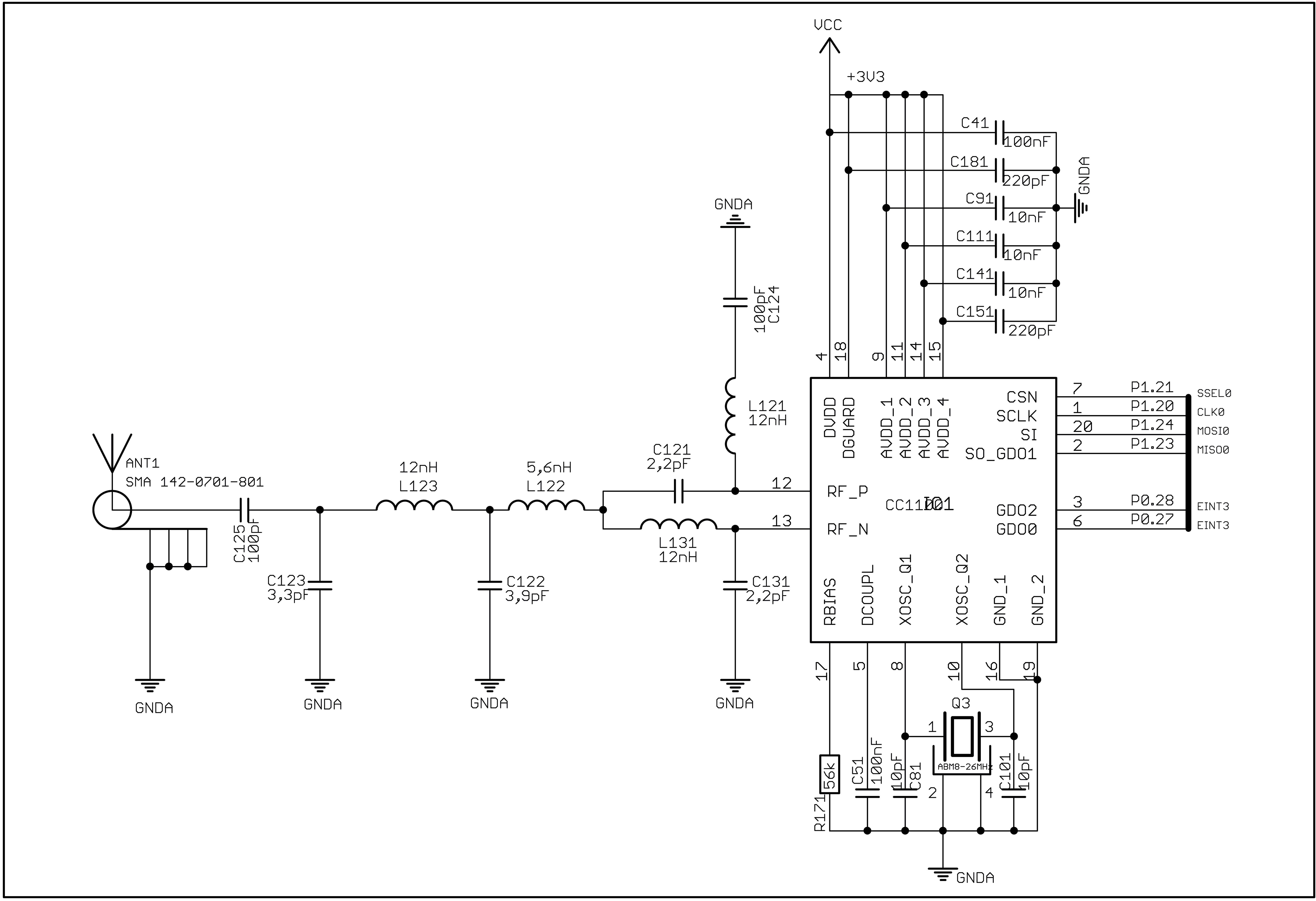
|
||||
|
||||
[MSB-A2 page @ Freie Universität Berlin/CST](http://www.mi.fu-berlin.de/inf/groups/ag-tech/projects/Z_Finished_Projects/ScatterWeb/modules/mod_MSB-A2.html)
|
||||
|
||||
|
||||
## Toolchains
|
||||
|
||||
See: [ARM](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM)
|
||||
|
||||
Working:
|
||||
- CodeSourcery 2013.11
|
||||
- CodeSourcery 2014.05 (only hello-world tested)
|
||||
- CodeSourcery 2008q3
|
||||
- [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded) 5.2.1 20151202 (release) (only [`default`](https://github.com/RIOT-OS/RIOT/tree/master/examples/default) tested)
|
||||
|
||||
Not Working:
|
||||
- Arm launchpad 2013-2
|
||||
- [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded) 4.8.4 2014q2 (release)
|
||||
|
||||
|
||||
## Programming and Debugging
|
||||
|
||||
Currently the MSBA2 boards only work properly™ with a CodeSourcery toolchain.
|
||||
|
||||
##### lpc2k_pgm
|
||||
|
||||
In order to flash the MSBA2 board you also need the `lpc2k_pgm` tool. You can
|
||||
build it by navigating to the `boards/msba2-common/tools` directory and then
|
||||
running `make`. The tool will be created inside the `bin/` sub-directory and has
|
||||
to be copied to a directory inside the `$PATH`.
|
||||
|
||||
##### flashing/debugging
|
||||
|
||||
Build using the following set of commands:
|
||||
|
||||
BOARD=msba2 make flash
|
||||
BOARD=msba2 make term
|
||||
|
||||
|
||||
|
||||
## Known Issues
|
||||
|
||||
None
|
||||
*/
|
||||
348
boards/msbiot/doc.txt
Normal file
348
boards/msbiot/doc.txt
Normal file
@ -0,0 +1,348 @@
|
||||
/**
|
||||
@defgroup boards_msbiot MSB-IoT
|
||||
@ingroup boards
|
||||
@brief Support for the MSB-IoT board
|
||||
|
||||
# Overview
|
||||
|
||||
The MSB-IoT was developed at FU Berlin and is based on a STM32F415RG MCU.
|
||||
|
||||
|
||||
|
||||
|
||||
# Hardware
|
||||
|
||||
### MCU
|
||||
|
||||
The centerpiece of the MSB-IoT is the STM32F415RG MCU. With a maximum
|
||||
frequency of 168 MHz it offers high performance for a microcontroller of its
|
||||
category. The STM32F415RG comes with a huge set of accessible communication
|
||||
interfaces and features that are listed [here](http://www.st.com/web/catalog/mmc/FM141/SC1169/SS1577/LN1035/PF252143?sc=internet/mcu/product/252143.jsp).
|
||||
|
||||
| MCU | STM32F415RG |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 192Kb (128Kb RAM + 64Kb CCMRAM) |
|
||||
| Flash | 1024Kb |
|
||||
| Frequency | up to 168MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 14 (12x 16bit, 2x 32bit [TIM2 + TIM5]) |
|
||||
| ADCs | 3x 12-bit (16 channel) |
|
||||
| UARTs | 6 (4 USART, 2 UART) |
|
||||
| SPIs | 3 |
|
||||
| I2Cs | 3 |
|
||||
| Vcc | 1.8V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00035129.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/reference_manual/DM00031020.pdf)|
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/programming_manual/DM00046982.pdf) |
|
||||
|
||||
Due to licensing issues, RIOT's driver implementations for the STM32F4 series
|
||||
are not based on ST's standard peripheral library. Therefore, not every feature
|
||||
of the MCU is currently supported in RIOT.
|
||||
|
||||
For an overview on the currently supported functional units please check the
|
||||
following directories:
|
||||
* [Peripheral implementations](https://github.com/RIOT-OS/RIOT/tree/master/cpu/stm32f4/periph) and corresponding
|
||||
[Interfaces](https://github.com/RIOT-OS/RIOT/tree/master/drivers/include/periph)
|
||||
* Main [STM32F4 directory](https://github.com/RIOT-OS/RIOT/tree/master/cpu/stm32f4)
|
||||
and [Cortex M4 directory](https://github.com/RIOT-OS/RIOT/tree/master/cpu/cortex-m4_common)
|
||||
|
||||
### RIOT pin mapping
|
||||
|
||||
The following picture shows the easily accessible pins of the board:
|
||||
|
||||
|
||||
RIOT uses its own naming scheme for GPIO pins and other functionality. The
|
||||
actual STM32F4 specific pins and functional units are mapped to RIOT internal
|
||||
enum values. Please refer to [this document](https://docs.google.com/spreadsheets/d/1RLn1j5h7VIQ1zezRs5Z3A7SYCMvEukHaKjhcsyrDz6g/pubhtml)
|
||||
for RIOTs pin mapping
|
||||
for the MSB-IoT (the document only lists ports where a PIN is mapped).
|
||||
|
||||
The pin mapping can be altered freely by editing the
|
||||
`boards/msbiot/include/periph_conf.h` header file found
|
||||
[here](https://github.com/RIOT-OS/RIOT/tree/master/boards/msbiot/include).
|
||||
Please keep in mind that changing pin mappings that are important for the
|
||||
integrated hardware could affect the corresponding driver implementations. The
|
||||
most important mappings needed for correct operation of the MSB-IoT with RIOT
|
||||
can be extracted from the `boards/msbiot/include/board.h` found
|
||||
[here](https://github.com/RIOT-OS/RIOT/tree/master/boards/msbiot/include).
|
||||
|
||||
### User Interface
|
||||
|
||||
**3 Buttons:**
|
||||
|
||||
| NAME | User Button T1 | User Button T2 | T RESET|
|
||||
|:----- |:----- |:--------- |:------|
|
||||
| Pin | PB13 | PA0 | NRST|
|
||||
The user buttons are mapped to GPIO_0 (Button T2) and GPIO_8 (Button T1) in
|
||||
the board's default configuration file for RIOT. To configure and use the
|
||||
buttons, you can use the provided interface functions from RIOT's
|
||||
[GPIO](https://github.com/RIOT-OS/RIOT/blob/master/drivers/include/periph/gpio.h) low-level driver interface.
|
||||
|
||||
Pushing the reset button will always reset the board and restart your
|
||||
application.
|
||||
|
||||
**3 user controllable LEDs:**
|
||||
|
||||
| NAME | LED_RED | LED_YELLOW | LED_GREEN |
|
||||
| ----- | --------- | ---------- | --------- |
|
||||
| Color | red | yellow | green |
|
||||
| Pin | PB8 | PB14 | PB15 |
|
||||
The LEDs can be controlled inside your RIOT application by using the LED
|
||||
macros provided [here](https://github.com/RIOT-OS/RIOT/blob/master/boards/msbiot/include/board.h).
|
||||
|
||||
There is also a yellow charge LED on the board indicating the charging
|
||||
process of the battery.
|
||||
|
||||
**1 Beeper:**
|
||||
|
||||
| NAME | Beeper |
|
||||
|:----- |:----- |
|
||||
| Pin | PB09 |
|
||||
The board's beeper allows for acoustic feedback. It needs a PWM signal
|
||||
between 1-5 kHz and is mapped to GPIO_5 and PWM_0 in RIOT. To configure and use
|
||||
the beeper inside your application, you can use the provided interface functions
|
||||
from RIOT's [GPIO](https://github.com/RIOT-OS/RIOT/blob/master/drivers/include/periph/gpio.h) and
|
||||
[PWM](https://github.com/RIOT-OS/RIOT/blob/master/drivers/include/periph/pwm.h)
|
||||
low-level driver interfaces.
|
||||
|
||||
|
||||
### CC1101 Sub-1GHz RF Transceiver
|
||||
|
||||
The board has an integrated CC1101 Sub-1GHz RF Transceiver which is connected
|
||||
to the MCU using the SPI. The transceiver allows for energy-efficient local
|
||||
communication in the frequency band below 1 GHz. The CC1101 is configured as the
|
||||
`defaulttransceiver` for the MSB-IoT in RIOT (see
|
||||
[here](https://github.com/RIOT-OS/RIOT/blob/master/boards/msbiot/Makefile.include)) and the necessary driver
|
||||
files are automatically included for applications that use the
|
||||
`defaulttransceiver` module.
|
||||
|
||||
| Product | CC1101 |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | Sub-1GHz RF Transceiver |
|
||||
| Vendor | Texas Instruments |
|
||||
| Datasheet | [Datasheet](http://www.ti.com/lit/ds/symlink/cc1101.pdf)|
|
||||
| Errata Sheet | [Errata Sheet](http://www.ti.com/lit/er/swrz020d/swrz020d.pdf) |
|
||||
| Other Technical Documents | [TI Webpage](http://www.ti.com/product/CC1101/technicaldocuments) |
|
||||
| Driver | [Implementation](https://github.com/RIOT-OS/RIOT/tree/master/drivers/cc110x) and [Interface](https://github.com/RIOT-OS/RIOT/tree/master/drivers/include/cc110x) |
|
||||
| SPI Device | SPI1 (Mapped to SPI_0 in RIOT)|
|
||||
| SCL | PA5 |
|
||||
| MISO | PA6 |
|
||||
| MOSI | PA7 |
|
||||
| CS | PB12 (Mapped to GPIO_7 in RIOT)|
|
||||
| GDO0 | PC4 (Mapped to GPIO_11 in RIOT)|
|
||||
| GDO2 | PC5 (Mapped to GPIO_12 in RIOT)|
|
||||
|
||||
|
||||
### CC3000 802.11b/g Wi-Fi Module
|
||||
In addition to the CC1101, the MSB-IoT also features a CC3000 Wi-Fi Module.
|
||||
The CC3000 is a self-contained wireless network module with a full embedded IPv4
|
||||
TCP/IP stack that for example allows to use the MSB-IoT as a gateway node to the
|
||||
internet. Please note that the CC3000 only supports operation in infrastructure
|
||||
mode and therefore always needs to be connected to an access point to be used
|
||||
for communication.
|
||||
|
||||
The CC3000's driver implementation for RIOT includes the full driver provided
|
||||
by Texas Instruments. The API documentation from TI can be found
|
||||
[here](http://software-dl.ti.com/ecs/simplelink/cc3000/public/doxygen_API/v1.14/html/index.html). To
|
||||
use the CC3000 in RIOT, just add `USEMODULE += cc3000` to your application's
|
||||
Makefile.
|
||||
|
||||
The driver for the CC3000 is not yet merged into RIOT's master branch. Please
|
||||
see pull request [#2603](https://github.com/RIOT-OS/RIOT/pull/2603) for progress
|
||||
on the inclusion.
|
||||
|
||||
| Product | CC3000 |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | 802.11b/g Wi-Fi Module |
|
||||
| Vendor | Texas Instruments |
|
||||
| Datasheet | [Datasheet](http://www.ti.com/lit/ds/symlink/cc3000.pdf)|
|
||||
| Errata Sheet | [Errata Sheet](http://www.ti.com/lit/er/swrz044b/swrz044b.pdf) |
|
||||
| Other Technical Documents | [TI Webpage](http://www.ti.com/product/CC3000/technicaldocuments) |
|
||||
| TI Wiki | [Wiki](http://processors.wiki.ti.com/index.php/CC3000) |
|
||||
| Driver | [Pull Request](https://github.com/RIOT-OS/RIOT/pull/2603) |
|
||||
| SPI Device | SPI2 (Mapped to SPI_1 in RIOT)|
|
||||
| SCL | PB10 |
|
||||
| MISO | PC2 |
|
||||
| MOSI | PC3 |
|
||||
| CS | PC1 (Mapped to GPIO_10 in RIOT)|
|
||||
| WLAN_ENABLE | PC13 (Mapped to GPIO_14 in RIOT)|
|
||||
| IRQ Line | PA10 (Mapped to GPIO_3 in RIOT)|
|
||||
|
||||
### MPU-9150 Nine-Axis MotionTracking Device
|
||||
The MSB-IoT is equipped with a MPU-9150 MotionTracking Device from
|
||||
Invensense. The device combines a gyroscope, a magnetometer and an accelerometer
|
||||
in one module.
|
||||
|
||||
Due to licensing issues, the current MPU-9150 driver implementation for RIOT
|
||||
is not based on Invensense's 'Motion Driver' library and offers only a limited
|
||||
set of features. Nonetheless, the RIOT driver allows to configure and read
|
||||
values from all three sensors of the device. For an overview on the supported
|
||||
features, you can check the [driver's interface](https://github.com/RIOT-OS/RIOT/blob/master/drivers/include/mpu9150.h).
|
||||
|
||||
A sample RIOT application for the MPU-9150 that utilizes the driver can be
|
||||
found [here](https://github.com/RIOT-OS/RIOT/tree/master/tests/driver_mpu9150).
|
||||
|
||||
| Product | MPU-9150 |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | Nine-Axis MotionTracking Device (Gyro, Accel and Compass) |
|
||||
| Vendor | Invensense |
|
||||
| Product Specification | [Product Specification](http://www.invensense.com/mems/gyro/documents/PS-MPU-9150A-00v4_3.pdf) |
|
||||
| Register Map | [Register Map](http://www.invensense.com/mems/gyro/documents/RM-MPU-9150A-00v4_2.pdf) |
|
||||
| Driver | [Implementation](https://github.com/RIOT-OS/RIOT/tree/master/drivers/mpu9150) and [Interface](https://github.com/RIOT-OS/RIOT/blob/master/drivers/include/mpu9150.h) |
|
||||
| I²C Device | I2C1 (Mapped to I2C_0 in RIOT)|
|
||||
| SCL | PB6 |
|
||||
| SDA | PB7 |
|
||||
| IRQ Line | PB11 (Mapped to GPIO_6 in RIOT) |
|
||||
|
||||
### Other components
|
||||
For the following components of the MSB-IoT, there is currently no support in
|
||||
RIOT:
|
||||
* [TCA6416 16-Bit I/O Expander](http://www.ti.com/product/tca6416)
|
||||
* Micro-SD-Card Interface
|
||||
|
||||
# Compiling, Flashing and Debugging
|
||||
This section only covers the automated functionality provided by RIOT's
|
||||
makefile system. If you don't want to rely on RIOT's make targets for flashing
|
||||
or debugging (for instance to use a different flashing tool), please check the
|
||||
documentation of your used tools.
|
||||
|
||||
### Prerequisites
|
||||
We strongly recommend the usage of the [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded) toolchain for the MSB-IoT.
|
||||
Support for other toolchains was not tested!
|
||||
|
||||
RIOT's provided functionality for debugging and flashing the MSB-IoT is based
|
||||
on the [Open On-Chip Debugger](http://openocd.org/) tool. A wiki page with
|
||||
installation instructions and some other information can be found
|
||||
[here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD).
|
||||
|
||||
### Quick start
|
||||
For a quick getting started guide you can stick to the steps explained on
|
||||
[this page](https://github.com/RIOT-OS/RIOT/wiki/Getting-started-with-STM32F%5B0%7C3%7C4%5Ddiscovery-boards). Just make sure to use "msbiot" as the
|
||||
respective board name.
|
||||
|
||||
### Compiling
|
||||
```
|
||||
fabian@fabian-ThinkPad-L412:~/myriot/RIOT/examples/hello-world$ BOARD=msbiot
|
||||
make
|
||||
Building application "hello-world" for "msbiot" with MCU "stm32f4".
|
||||
|
||||
"make" -C /home/fabian/myriot/RIOT/boards/msbiot
|
||||
"make" -C /home/fabian/myriot/RIOT/core
|
||||
"make" -C /home/fabian/myriot/RIOT/cpu/stm32f4
|
||||
"make" -C /home/fabian/myriot/RIOT/cpu/cortex-m4_common
|
||||
"make" -C /home/fabian/myriot/RIOT/cpu/stm32f4/periph
|
||||
"make" -C /home/fabian/myriot/RIOT/drivers
|
||||
"make" -C /home/fabian/myriot/RIOT/sys
|
||||
"make" -C /home/fabian/myriot/RIOT/sys/auto_init
|
||||
text data bss dec hex filename
|
||||
11116 116 6444 17676 450c
|
||||
/home/fabian/myriot/RIOT/examples/hello-world/bin/msbiot/hello-world.elf
|
||||
```
|
||||
|
||||
### Flashing
|
||||
```
|
||||
fabian@fabian-ThinkPad-L412:~/myriot/RIOT/examples/hello-world$ BOARD=msbiot
|
||||
make flash
|
||||
Building application "hello-world" for "msbiot" with MCU "stm32f4".
|
||||
|
||||
"make" -C /home/fabian/myriot/RIOT/boards/msbiot
|
||||
"make" -C /home/fabian/myriot/RIOT/core
|
||||
"make" -C /home/fabian/myriot/RIOT/cpu/stm32f4
|
||||
"make" -C /home/fabian/myriot/RIOT/cpu/cortex-m4_common
|
||||
"make" -C /home/fabian/myriot/RIOT/cpu/stm32f4/periph
|
||||
"make" -C /home/fabian/myriot/RIOT/drivers
|
||||
"make" -C /home/fabian/myriot/RIOT/sys
|
||||
"make" -C /home/fabian/myriot/RIOT/sys/auto_init
|
||||
text data bss dec hex filename
|
||||
11116 116 6444 17676 450c
|
||||
/home/fabian/myriot/RIOT/examples/hello-world/bin/msbiot/hello-world.elf
|
||||
/home/fabian/myriot/RIOT/dist/tools/openocd/openocd.sh flash
|
||||
### Flashing Target ###
|
||||
Open On-Chip Debugger 0.8.0 (2015-03-01-08:19)
|
||||
Licensed under GNU GPL v2
|
||||
For bug reports, read
|
||||
http://openocd.sourceforge.net/doc/doxygen/bugs.html
|
||||
srst_only separate srst_nogate srst_open_drain connect_deassert_srst
|
||||
Info : This adapter doesn't support configurable speed
|
||||
Info : STLINK v2 JTAG v17 API v2 SWIM v4 VID 0x0483 PID 0x3748
|
||||
Info : using stlink api v2
|
||||
Info : Target voltage: 3.183191
|
||||
Info : stm32f4x.cpu: hardware has 0 breakpoints, 0 watchpoints
|
||||
Error: jtag status contains invalid mode value - communication failure
|
||||
Polling target stm32f4x.cpu failed, GDB will be halted. Polling again in
|
||||
100ms
|
||||
Error: jtag status contains invalid mode value - communication failure
|
||||
Polling target stm32f4x.cpu failed, GDB will be halted. Polling again in
|
||||
300ms
|
||||
TargetName Type Endian TapName State
|
||||
-- ------------------ ---------- ------ ------------------ ------------
|
||||
0* stm32f4x.cpu hla_target little stm32f4x.cpu unknown
|
||||
target state: halted
|
||||
target halted due to debug-request, current mode: Thread
|
||||
xPSR: 0x01000000 pc: 0x080002fc msp: 0x2000ab48
|
||||
Polling target stm32f4x.cpu succeeded again
|
||||
target state: halted
|
||||
target halted due to debug-request, current mode: Thread
|
||||
xPSR: 0x01000000 pc: 0x080002fc msp: 0x2000ab48
|
||||
** Programming Started **
|
||||
auto erase enabled
|
||||
Info : stm32f4x errata detected - fixing incorrect MCU_IDCODE
|
||||
Info : device id = 0x10006413
|
||||
Info : flash size = 1024kbytes
|
||||
target state: halted
|
||||
target halted due to breakpoint, current mode: Thread
|
||||
xPSR: 0x61000000 pc: 0x20000042 msp: 0x2000ab48
|
||||
wrote 16384 bytes from file /home/fabian/myriot/RIOT/examples/hello-
|
||||
world/bin/msbiot/hello-world.hex in 0.869447s (18.403 KiB/s)
|
||||
** Programming Finished **
|
||||
** Verify Started **
|
||||
target state: halted
|
||||
target halted due to breakpoint, current mode: Thread
|
||||
xPSR: 0x61000000 pc: 0x2000002e msp: 0x2000ab48
|
||||
verified 11232 bytes in 0.124356s (88.204 KiB/s)
|
||||
** Verified OK **
|
||||
shutdown command invoked
|
||||
shutdown command invoked
|
||||
Done flashing
|
||||
```
|
||||
|
||||
### Debugging
|
||||
```
|
||||
fabian@fabian-ThinkPad-L412:~/myriot/RIOT/examples/hello-world$ BOARD=msbiot
|
||||
make debug
|
||||
/home/fabian/myriot/RIOT/dist/tools/openocd/openocd.sh debug
|
||||
### Starting Debugging ###
|
||||
Open On-Chip Debugger 0.8.0 (2015-03-01-08:19)
|
||||
Licensed under GNU GPL v2
|
||||
For bug reports, read
|
||||
http://openocd.sourceforge.net/doc/doxygen/bugs.html
|
||||
GNU gdb (GNU Tools for ARM Embedded Processors) 7.6.0.20131129-cvs
|
||||
Copyright (C) 2013 Free Software Foundation, Inc.
|
||||
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
|
||||
This is free software: you are free to change and redistribute it.
|
||||
There is NO WARRANTY, to the extent permitted by law. Type "show copying"
|
||||
and "show warranty" for details.
|
||||
This GDB was configured as "--host=i686-linux-gnu --target=arm-none-eabi".
|
||||
For bug reporting instructions, please see:
|
||||
<http://www.gnu.org/software/gdb/bugs/>...
|
||||
Reading symbols from /home/fabian/myriot/RIOT/examples/hello-
|
||||
world/bin/msbiot/hello-world.elf...done.
|
||||
Remote debugging using :3333
|
||||
reset_handler () at /home/fabian/myriot/RIOT/cpu/stm32f4/startup.c:54
|
||||
54 {
|
||||
(gdb)
|
||||
```
|
||||
|
||||
### Using the UART for STDIO
|
||||
The MCU's USART2 is set as the default input/output for the MSB-IoT inside
|
||||
RIOT (mapped to UART_0). It is initialized and configured automatically for
|
||||
every RIOT application and can be used for communication with your computer. The
|
||||
easiest way is to use an USB to TTL adapter:
|
||||
|
||||
Step 1: Connect your adapter and the boards pin strip with RX<=>PA02,
|
||||
TX<=>PA03 and GND<=>GND
|
||||
|
||||
Step 2: Done. The MCUs USART2 is used as STDIO.
|
||||
*/
|
||||
72
boards/mulle/doc.txt
Normal file
72
boards/mulle/doc.txt
Normal file
@ -0,0 +1,72 @@
|
||||
/**
|
||||
@defgroup boards_mulle Eistec Mulle
|
||||
@ingroup boards
|
||||
@brief Support for Eistec Mulle IoT boards
|
||||
|
||||

|
||||
|
||||
The Mulle is a miniature wireless Embedded Internet System suitable for
|
||||
wireless sensors connected to the Internet of Things, and designed for rapid
|
||||
prototyping. It can be bought directly from [Eistec AB](http://www.eistec.se).
|
||||
|
||||
- [Official homepage](http://www.eistec.se/mulle)
|
||||
- [Eistec wiki](https://github.com/eistec/mulle/wiki)
|
||||
|
||||
Use `BOARD=mulle` for building RIOT for this platform.
|
||||
|
||||
## Components
|
||||
|
||||
https://github.com/eistec/mulle/wiki/Datasheets contains a list of relevant
|
||||
documentation for the components.
|
||||
|
||||
| MCU | MK60DN512VLL10 – Cortex-M4 |
|
||||
|-------|-----------------------------------|
|
||||
| RAM | 64kB |
|
||||
| Flash | 512kB|
|
||||
| radio chipset | AT86RF212B, sub-GHz IEEE802.15.4 transceiver, similar to the AT86RF233 |
|
||||
| external flash memory | Micron M25P16 16 Mbits external NOR flash, used for storing configuration, measurements and other slow changing non-volatile data |
|
||||
| external FRAM memory | Cypress/Ramtron FM25L04B 4 Kbits external F-RAM, used for storing counters and other rapidly changing non-volatile data |
|
||||
| accelerometer | ST micro LIS3DH MEMS accelerometer, |
|
||||
|
||||
|
||||
## Layout
|
||||
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
The Mulle board is supported by mainline RIOT. See the below table for
|
||||
software support status for the different components.
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | MK60DN512VLL10 | partly | See below |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes | |
|
||||
| | UART | yes | |
|
||||
| | I2C | yes | |
|
||||
| | SPI | yes |Master mode works, slave mode unsupported |
|
||||
| | USB | no | [PR#3890](https://github.com/RIOT-OS/RIOT/pull/3890) |
|
||||
| | RTT | yes | |
|
||||
| | RNG | yes | |
|
||||
| | timer | yes | uses LPTMR module for TIMER_0 (used by xtimer), 32.768 kHz tick rate. PIT for additional timers, F_BUS tick rate (48 MHz default) |
|
||||
| | PM/LLWU | in progress | [PR#2605](https://github.com/RIOT-OS/RIOT/pull/2605) |
|
||||
| Radio Chip | AT86RF212B | yes | |
|
||||
| Accelerometer | LIS3DH | yes | |
|
||||
| Flash | M25P16 | in progress | [PR#6762](https://github.com/RIOT-OS/RIOT/pull/6762) |
|
||||
| FRAM | FM25L04B | yes | |
|
||||
|
||||
## Toolchains
|
||||
|
||||
See [ARM Family](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM), and
|
||||
[Eistec wiki - Installing-toolchain (GCC)](https://github.com/eistec/mulle/wiki/Installing-toolchain-%28GCC%29)
|
||||
|
||||
Working:
|
||||
* [gcc-arm-embedded](https://github.com/RIOT-OS/RIOT/wiki/Family:-ARM#gcc-arm-embedded-toolchain)
|
||||
* Clang 3.4 - Clang 4.0 - Install procedure not documented but pretty
|
||||
straightforward, Makefiles and build system is fully functional with Clang.
|
||||
|
||||
### Programming and Debugging
|
||||
|
||||
See [Eistec wiki](https://github.com/eistec/mulle/wiki).
|
||||
*/
|
||||
19
boards/native/doc.txt
Normal file
19
boards/native/doc.txt
Normal file
@ -0,0 +1,19 @@
|
||||
/**
|
||||
@defgroup boards_native Native Board
|
||||
@ingroup boards
|
||||
|
||||
[Family: native](https://github.com/RIOT-OS/RIOT/wiki/Family:-native)
|
||||
|
||||
# Overview
|
||||

|
||||
|
||||
# Hardware
|
||||
- CPU: Host CPU
|
||||
- RAM: Host RAM
|
||||
- Flash: Host file system
|
||||
- Network: Tap Interface
|
||||
- UART: Runtime configurable - `/dev/tty*` are supported
|
||||
- Timers: Host timer
|
||||
- LEDs: One red and one green LED - state changes are printed to the UART
|
||||
*/
|
||||
54
boards/nrf51dongle/doc.txt
Normal file
54
boards/nrf51dongle/doc.txt
Normal file
@ -0,0 +1,54 @@
|
||||
/**
|
||||
@defgroup boards_nrf51dongle nRF51 Dongle
|
||||
@ingroup boards
|
||||
@brief Support for the Nordic nRF51 Dongle
|
||||
|
||||
## Overview:
|
||||
The nRF51822 is a multi-protocol SoC ideally suited for Bluetooth® low energy
|
||||
and 2.4GHz ultra low-power wireless applications from Nordic Semiconductor. The
|
||||
nRF51822 is built around a 32-bit ARM® Cortex™ M0 CPU with 256kB flash + 16kB
|
||||
RAM. The embedded 2.4GHz transceiver supports Bluetooth low energy as well as
|
||||
2.4GHz operation.
|
||||
|
||||
Nordic's development kit contains two different boards:
|
||||
- **pca10000**: a USB-dongle containing the nRF51822 and a RGB-Led
|
||||
- **pca10005**: two a basic nRF51822 boards making the MCU pins available
|
||||
|
||||
While the pca10000 contains an on-board J-Link debugger, the pca10005 boards
|
||||
have to be flashed/debugged using the (included) external J-Link device.
|
||||
|
||||
## Hardware:
|
||||

|
||||
|
||||
| MCU | NRF51822QFAA |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0 |
|
||||
| Vendor | Nordic Semiconductor |
|
||||
| RAM | 16Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | 16MHz |
|
||||
| FPU | no |
|
||||
| Timers | 3 (2x 16-bit, 1x 32-bit [TIMER0]) |
|
||||
| ADCs | 1x 10-bit (8 channels) |
|
||||
| UARTs | 1 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| Radio | 2.4GHz BLE compatiple, +4dBm to -20 dBm output, -93 dBm RX sensitivity |
|
||||
| Vcc | 1.8V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.freqchina.com/cn/down.asp?ID=135) (pdf file) |
|
||||
| Reference Manual | [Reference Manual](http://www.100y.com.tw/pdf_file/39-Nordic-NRF51822.pdf) |
|
||||
|
||||
|
||||
## Flashing the Device:
|
||||
The nRF51822 PC10000 board is shipped with an on-board JLink debugger.
|
||||
However the PC10004/5 board uses an external flash tool as seen in the Image
|
||||
above. Under Linux, the easiest way flashing the nRF51822 is using the JLink
|
||||
tool(version >4.85) from [Segger](http://www.segger.com/jlink-software.html).
|
||||
|
||||
To interact with the board just start the tool using the following command:
|
||||
`# JLinkExe -device nrf51822`
|
||||
|
||||
For RIOT itself there is a Flash-Script available. When using any of the
|
||||
Examples type in the following command:
|
||||
`# Make -B clean flash`
|
||||
*/
|
||||
5
boards/nrf52840dk/doc.txt
Normal file
5
boards/nrf52840dk/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_nrf52840dk nRF52840 DK
|
||||
@ingroup boards
|
||||
@brief Support for the nRF52840 DK
|
||||
*/
|
||||
98
boards/nrf52dk/doc.txt
Normal file
98
boards/nrf52dk/doc.txt
Normal file
@ -0,0 +1,98 @@
|
||||
/**
|
||||
@defgroup boards_nrf52dk nRF52 DK
|
||||
@ingroup boards
|
||||
@brief Support for the nRF52 DK
|
||||
|
||||
## Overview:
|
||||
There are some nameless simple development Boards with an nRF52832 available.
|
||||
These boards providing access to most SoC ports. There are two buttons (RST,
|
||||
KEY), two LED’s (Pin 30, 31), a voltage regulator and a current messurment shunt
|
||||
on board. A serial connection and flashing must be provided by external
|
||||
Hardware.
|
||||
|
||||
The nRF52832 is a SoC with a 32-bit ARM® Cortex™-M4F CPU with 512kB Flash and
|
||||
64kB RAM. The embedded 2.4GHz transceiver supports Bluetooth low energy, ANT and
|
||||
proprietary 2.4 GHz protocol stack. It is on air compatible with the nRF51
|
||||
Series, nRF24L and nRF24AP Series products from Nordic Semiconductor.
|
||||
|
||||
## Hardware:
|
||||

|
||||
|
||||
| MCU | NRF52832 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4F |
|
||||
| Vendor | Nordic Semiconductor |
|
||||
| RAM | 64Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | 64MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 5 (32-bit) |
|
||||
| RTC | 3 |
|
||||
| ADCs | 1x 12-bit (8 channels) |
|
||||
| UARTs | 1 |
|
||||
| SPIs | 3 |
|
||||
| I2Cs | 2 |
|
||||
| I2S | 1 |
|
||||
| PWM | 3*4 Channels |
|
||||
| Radio | 2.4GHz BLE compatiple, -20 dBm to +4 dBm output, -96 dBm RX sensitivity |
|
||||
| Vcc | 1.7V - 3.6V |
|
||||
| Datasheet | [Datasheet](https://www.nordicsemi.com/eng/Products/Bluetooth-low-energy/nRF52832) |
|
||||
| Reference Manual | [Reference Manual](http://infocenter.nordicsemi.com/index.jsp?topic=%2Fcom.nordic.infocenter.nrf52%2Fdita%2Fnrf52%2Fnrf52_series.html&cp=1) |
|
||||
|
||||
##Pin layout
|
||||
|
||||
|MCU pin|Board pin|Function|
|
||||
|:-----------|:-----------|:----------|
|
||||
|P0.0| n.c. | |
|
||||
|P0.1| n.c. | |
|
||||
|P0.2| D07 | |
|
||||
|P0.3| D08 | |
|
||||
|P0.4| D09 | KEY |
|
||||
|P0.5| D10 | |
|
||||
|P0.6| D13 | |
|
||||
|P0.7| D14 | |
|
||||
|P0.8| D15 | |
|
||||
|P0.9| n.c. | |
|
||||
|P0.10| n.c. | NFC antenna 2 (unusable) |
|
||||
|P0.11| D18 | RXD (software defined) |
|
||||
|P0.12| D19 | TXD (software defined) |
|
||||
|P0.13| D20 | |
|
||||
|P0.14| D21 | |
|
||||
|P0.15| D22 | |
|
||||
|P0.16| D23 | |
|
||||
|P0.17| D24 | |
|
||||
|P0.18| D25 | |
|
||||
|P0.19| D26 | |
|
||||
|P0.20| D27 | |
|
||||
|P0.21| RST | RESET |
|
||||
|P0.22| D28 | near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.23| D29 | near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.24| D30 | near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.25| D00 | near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.26| D01 | near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.27| D02 | near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.28| D03 | near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.29| D04 | near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.30| D05 | LED0, near Radio! -> Low drive, low frequency I/O only. |
|
||||
|P0.31| D06 | LED1, near Radio! -> Low drive, low frequency I/O only. |
|
||||
| | V33 | 3.3V for MCU |
|
||||
| | D16 | ? |
|
||||
| | D17 | ? |
|
||||
| | VBUS | 5V input |
|
||||
| | GND | |
|
||||
| | RXD | n.c. |
|
||||
| | TXD | n.c. |
|
||||
| | TD0 | n.c. |
|
||||
| | TD1 | n.c. |
|
||||
| SWDIO | TMS | |
|
||||
| SWCLK | TCK | |
|
||||
|
||||
**Caution**: NFC is not usable with this board.
|
||||
|
||||
## Current measurement:
|
||||
|
||||
There are two pins for current measurement on board. Don't connect these pins
|
||||
to GND!. The left pin is at 3.3V level and the right pin is connected to V33.
|
||||
Divide the measured voltage between this pins by 22 to get the current.
|
||||
*/
|
||||
5
boards/nrf6310/doc.txt
Normal file
5
boards/nrf6310/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_nrf6310 NRF6310 (Nordic NRF Hardware Development Kit)
|
||||
@ingroup boards
|
||||
@brief Support for the nRF51 boards: nrf6310 or MOMMOSOFT BLE DEVKIT.N
|
||||
*/
|
||||
74
boards/nucleo-f030r8/doc.txt
Normal file
74
boards/nucleo-f030r8/doc.txt
Normal file
@ -0,0 +1,74 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f030r8 STM32 Nucleo-F030R8
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F030R8
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F030 is a board from ST's Nucleo family supporting a ARM Cortex-M0
|
||||
STM32F030R8 microcontroller with 8Kb of SRAM and 64Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F030R8 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 8Kb |
|
||||
| Flash | 64Kb |
|
||||
| Frequency | up to 48MHz) |
|
||||
| FPU | yes |
|
||||
| Timers | 11 (2x watchdog, 1 SysTick, 8x 16-bit) |
|
||||
| ADCs | 1x 12-bit |
|
||||
| UARTs | 6 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/en/evaluation-tools/nucleo-f030r8.html) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/datasheet/stm32f030r8.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/programming_manual/dm00051352.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/resource/en/user_manual/dm00105823.pdf)|
|
||||
|
||||
|
||||
|
||||
## Implementation Status
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F030R8 | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (4 pins available) | |
|
||||
| | UART | 2 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX) and USART1 on PA10(RX)/PA09(TX) |
|
||||
| | ADC | 6 pins | |
|
||||
| | I2C | no | |
|
||||
| | SPI | no | |
|
||||
| | USB | no | |
|
||||
| | Timer | 3 16 bit timers | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F030 board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f030 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f030 debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F030 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
5
boards/nucleo-f031k6/doc.txt
Normal file
5
boards/nucleo-f031k6/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
* @defgroup boards_nucleo-f031k6 STM32 Nucleo-F031K6
|
||||
* @ingroup boards_common_nucleo32
|
||||
* @brief Support for the STM32 Nucleo-F031K6
|
||||
*/
|
||||
5
boards/nucleo-f042k6/doc.txt
Normal file
5
boards/nucleo-f042k6/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
* @defgroup boards_nucleo-f042k6 STM32 Nucleo-F042K6
|
||||
* @ingroup boards_common_nucleo32
|
||||
* @brief Support for the STM32 Nucleo-F042K6
|
||||
*/
|
||||
74
boards/nucleo-f070rb/doc.txt
Normal file
74
boards/nucleo-f070rb/doc.txt
Normal file
@ -0,0 +1,74 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f070rb STM32 Nucleo-F070RB
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F070RB
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F070 is a board from ST's Nucleo family supporting a ARM Cortex-M0
|
||||
STM32F070RB microcontroller with 16Kb of SRAM and 128Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F070RB |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 16Kb |
|
||||
| Flash | 128Kb |
|
||||
| Frequency | up to 48MHz) |
|
||||
| FPU | yes |
|
||||
| Timers | 11 (2x watchdog, 1 SysTick, 8x 16-bit) |
|
||||
| ADCs | 1x 12-bit |
|
||||
| UARTs | 4 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/en/evaluation-tools/nucleo-f070rb.html) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/datasheet/stm32f070rb.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/programming_manual/dm00051352.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/resource/en/user_manual/dm00105823.pdf)|
|
||||
|
||||
|
||||
|
||||
## Implementation Status
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F070RB | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (4 pins available) | |
|
||||
| | UART | 3 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX), USART1 on PA10(RX)/PA09(TX) and USART3 on PC11(RX)/PC10(TX) |
|
||||
| | ADC | 6 pins | |
|
||||
| | I2C | no | |
|
||||
| | SPI | no | |
|
||||
| | USB | no | |
|
||||
| | Timer | 3 16 bit timers | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F070 board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f070 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f070 debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F070 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
73
boards/nucleo-f072rb/doc.txt
Normal file
73
boards/nucleo-f072rb/doc.txt
Normal file
@ -0,0 +1,73 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f072rb STM32 Nucleo-F072RB
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F072RB
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F072 is a board from ST's Nucleo family supporting a ARM Cortex-M0
|
||||
STM32F072RB microcontroller with 16Kb of SRAM and 128Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||
|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F072RB |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 16Kb |
|
||||
| Flash | 128Kb |
|
||||
| Frequency | up to 48MHz) |
|
||||
| FPU | yes |
|
||||
| Timers | 12 (2x watchdog, 1 SysTick, 8x 16-bit, 1x 32-bit) |
|
||||
| ADCs | 1x 12-bit (up to 16 channels) |
|
||||
| UARTs | 4 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/en/evaluation-tools/nucleo-f072rb.html) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/datasheet/stm32f072rb.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/reference_manual/dm00031936.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/resource/en/user_manual/dm00105823.pdf)|
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F072RB | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (4 pins available) | |
|
||||
| | UART | 3 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX), USART1 on PA10(RX)/PA09(TX) and USART3 on PC11(RX)/PC10(TX) |
|
||||
| | PWM | 7 pins | |
|
||||
| | ADC | 6 pins | |
|
||||
| | I2C | no | |
|
||||
| | SPI | yes (SPI1) | |
|
||||
| | USB | no | |
|
||||
| | Timer | 1 32 bit timers (TIM1) | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F072 board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f072 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f072 debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F072 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
88
boards/nucleo-f091rc/doc.txt
Normal file
88
boards/nucleo-f091rc/doc.txt
Normal file
@ -0,0 +1,88 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f091rc STM32 Nucleo-F091RC
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F091RC
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F091 is a board from ST's Nucleo family supporting a ARM Cortex-M0
|
||||
STM32F091 microcontroller with 32Kb of RAM and 256Kb of ROM.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
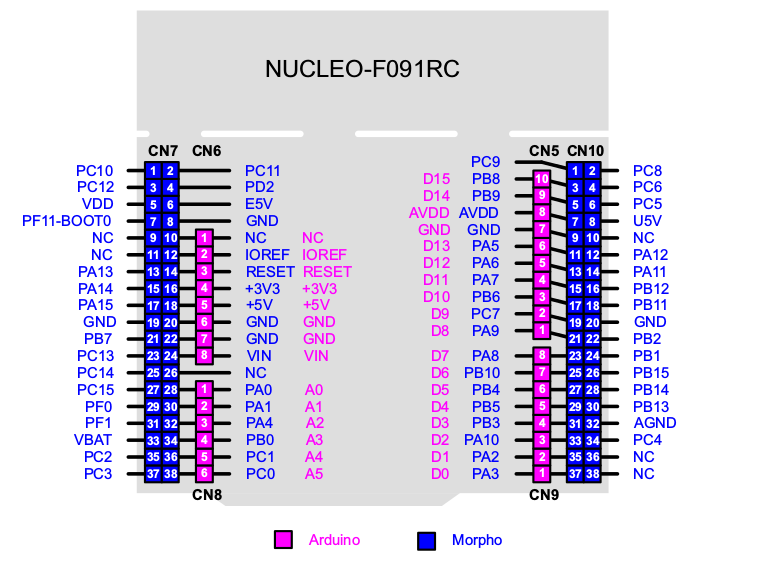
|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F091RC |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | up to 48MHz (using the on-board 8MHz Oszillator of the ST-Link) |
|
||||
| FPU | no |
|
||||
| Timers | 9 (8x 16-bit, 1x 32-bit [TIM2]) |
|
||||
| ADCs | 1x 12-bit |
|
||||
| UARTs | 8 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/web/en/resource/technical/document/datasheet/DM00115237.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00031936.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/DM00051352.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
### RIOT static pin mapping
|
||||
please refer to [this](https://docs.google.com/spreadsheets/d/1gnxsux5WpFrn-33Ivb9nGgTBqooqgDYxRkhZms-cvsc/edit?usp=sharing)
|
||||
document for the pin mapping as implemenented in `boards/nucleo-f091/include/periph_conf.h`
|
||||
|
||||
### User Interface
|
||||
1 Button:
|
||||
|
||||
| NAME | USER |
|
||||
|:----- |:----- |
|
||||
| Pin | PC13 |
|
||||
|
||||
1 LEDs:
|
||||
|
||||
| NAME | LED_GREEN |
|
||||
| ----- | ------------- |
|
||||
| Color | orange |
|
||||
| Pin | PA5 |
|
||||
|
||||
|
||||
## Implementation Status
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F091RC | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | no | |
|
||||
| | PWM | no | |
|
||||
| | UART | full | |
|
||||
| | I2C | no | |
|
||||
| | SPI | no | |
|
||||
| | USB | no | |
|
||||
| | Timer | full | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F091 board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f091 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f091 debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F091 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
68
boards/nucleo-f103rb/doc.txt
Normal file
68
boards/nucleo-f103rb/doc.txt
Normal file
@ -0,0 +1,68 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f103rb STM32 Nucleo-F103RB
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F103RB
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F103 is a board from ST's Nucleo family supporting a ARM Cortex-M3
|
||||
STM32F103RB microcontroller with 20Kb of SRAM and 128Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
| MCU | STM32F103RB |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 20Kb |
|
||||
| Flash | 128Kb |
|
||||
| Frequency | up to 72MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 7 (2x watchdog, 1 SysTick, 4x 16-bit) |
|
||||
| ADCs | 1x 12-bit |
|
||||
| UARTs | 3 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/en/evaluation-tools/nucleo-f103rb.html) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/datasheet/stm32f103rb.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/programming_manual/dm00051352.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/resource/en/user_manual/dm00105823.pdf)|
|
||||
|
||||
## Implementation Status
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F103RB | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (4 pins available) | |
|
||||
| | UART | 2 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX), USART1 on PA10(RX)/PA09(TX) and USART3 on PB11(RX)/PB10(TX) |
|
||||
| | ADC | no | |
|
||||
| | I2C | yes (I2C1 and I2C2) | |
|
||||
| | SPI | yes (SPI1 and SPI2) | |
|
||||
| | USB | no | |
|
||||
| | Timer | 2 16 bit timers (TIM2 and TIM3) | |
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F103 board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing:
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f103 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f103 debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F103 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
70
boards/nucleo-f207zg/doc.txt
Normal file
70
boards/nucleo-f207zg/doc.txt
Normal file
@ -0,0 +1,70 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f207zg STM32 Nucleo-F207ZG
|
||||
@ingroup boards_common_nucleo144
|
||||
@brief Support for the STM32 Nucleo-F207ZG
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo144-F207 is a board from ST's Nucleo family supporting a ARM
|
||||
Cortex-M3
|
||||
STM32F207ZG microcontroller with 128Kb of SRAM and 1Mb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||
|
||||
|
||||
### MCU
|
||||
|
||||
| MCU | STM32F207ZG |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 128Kb |
|
||||
| Flash | 1Mb |
|
||||
| Frequency | up to 120MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 17 (2x watchdog, 1 SysTick, 12x 16-bit, 2x 32-bit [TIM2]) |
|
||||
| ADCs | 3x 12-bit |
|
||||
| UARTs | 4 |
|
||||
| SPIs | 3 |
|
||||
| I2Cs | 3 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/resource/en/datasheet/stm32f207zg.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/reference_manual/cd00225773.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/programming_manual/cd00228163.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/resource/en/user_manual/dm00244518.pdf)|
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F207ZG | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (7 pins available in see [PR #6192](https://github.com/RIOT-OS/RIOT/pull/6192)) | |
|
||||
| | UART | 2 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX) and USART6 on PA12(RX)/PA11(TX) |
|
||||
| | I2C | 1 I2C | |
|
||||
| | SPI | 1 SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | 2 32 bit timers | |
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The ST Nucleo-F207ZG board includes an on-board ST-LINK V2-1 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo144-f207 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo144-f207 debug
|
||||
```
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo144-F207 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
83
boards/nucleo-f302r8/doc.txt
Normal file
83
boards/nucleo-f302r8/doc.txt
Normal file
@ -0,0 +1,83 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f302r8 STM32 Nucleo-F302R8
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F302R8
|
||||
|
||||
## Overview
|
||||
|
||||
Not yet available upstream, see [PR 6615](https://github.com/RIOT-OS/RIOT/pull/6615)
|
||||
|
||||
The [Nucleo-F302](http://www.st.com/en/evaluation-tools/nucleo-f302r8.html)
|
||||
is
|
||||
a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
[STM32F302R8](http://www.st.com/en/microcontrollers/stm32f302r8.html)
|
||||
microcontroller with 16KB of RAM and 64KB of ROM.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F302R8 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 16KB |
|
||||
| Flash | 64KB |
|
||||
| Frequency | up to 72MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 9 (5x 16-bit, 1x 32-bit [TIM2], 2 watchdog, 1 systick) |
|
||||
| ADCs | 1 with selectable resolution (6,8,10,12-bit) |
|
||||
| UARTs | 3 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 3 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/resource/en/datasheet/stm32f302r6.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/reference_manual/dm00094349.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/programming_manual/dm00046982.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F302R8 | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | one PWM (D5) | |
|
||||
| | UART | three UART | |
|
||||
| | I2C | no | |
|
||||
| | SPI | one SPI (SPI2) | |
|
||||
| | USB | no | |
|
||||
| | Timer | one 32 timer (TIM2) | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The ST Nucleo-F302 board includes an on-board ST-LINK V2-1 programmer.
|
||||
The easiest way to program the board is to use OpenOCD. Once you have
|
||||
installed OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD)
|
||||
for installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f302 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f302 debug
|
||||
```
|
||||
|
||||
### Troubleshooting
|
||||
|
||||
For some reason the ST Link programmer can be outdated, making it impossible
|
||||
to
|
||||
flash or to access the debug UART via USB. To fix this, please use
|
||||
the ST Link firmware update tool following
|
||||
[this documentation](http://www.st.com/en/embedded-software/stsw-link007.html).
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F303RE board we strongly recommend the usage of
|
||||
the [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded) toolchain.
|
||||
*/
|
||||
73
boards/nucleo-f303k8/doc.txt
Normal file
73
boards/nucleo-f303k8/doc.txt
Normal file
@ -0,0 +1,73 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f303k8 STM32 Nucleo-F303K8
|
||||
@ingroup boards_common_nucleo32
|
||||
@brief Support for the STM32 Nucleo-F303K8
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F303 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F303RE
|
||||
microcontroller with 64Kb of RAM and 512Kb of ROM.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
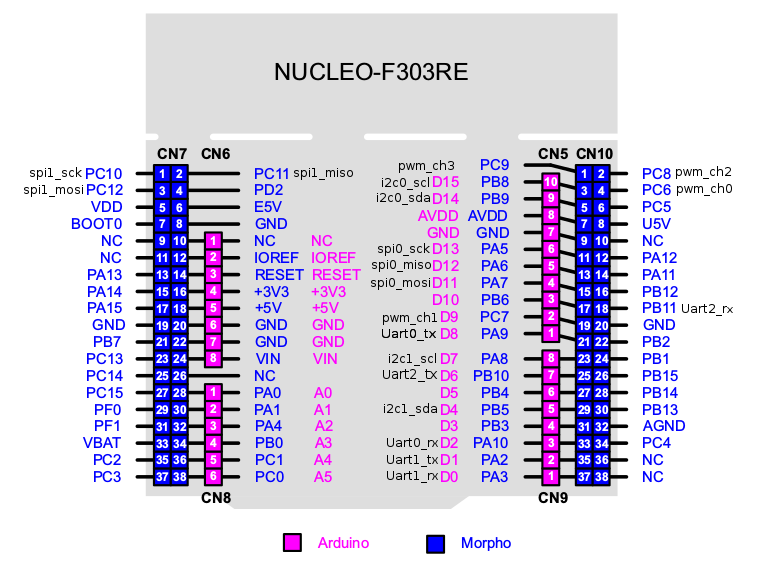
|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F303RE |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 64Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | up to 72MHz) |
|
||||
| FPU | yes |
|
||||
| Timers | 14 (13x 16-bit, 1x 32-bit [TIM2]) |
|
||||
| ADCs | 4x 12-bit |
|
||||
| UARTs | 5 |
|
||||
| SPIs | 4 |
|
||||
| I2Cs | 3 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00118585.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00043574.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/DM00046982.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
|
||||
|
||||
## Implementation Status
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F303RE | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | one PWM | |
|
||||
| | UART | three UART | |
|
||||
| | I2C | two I2C | |
|
||||
| | SPI | two SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | one 32 timer | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F303RE board includes an on-board ST-LINK V2 programmer.
|
||||
The easiest way to program the board is to use OpenOCD. Once you have
|
||||
installed OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD)
|
||||
for installation instructions), you can flash the board simply by typing.
|
||||
|
||||
```
|
||||
make flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F303RE board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
73
boards/nucleo-f303re/doc.txt
Normal file
73
boards/nucleo-f303re/doc.txt
Normal file
@ -0,0 +1,73 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f303re STM32 Nucleo-F303RE
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F303RE
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F303 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F303RE
|
||||
microcontroller with 64Kb of RAM and 512Kb of ROM.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F303RE |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 64Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | up to 72MHz) |
|
||||
| FPU | yes |
|
||||
| Timers | 14 (13x 16-bit, 1x 32-bit [TIM2]) |
|
||||
| ADCs | 4x 12-bit |
|
||||
| UARTs | 5 |
|
||||
| SPIs | 4 |
|
||||
| I2Cs | 3 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00118585.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00043574.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/DM00046982.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
|
||||
|
||||
## Implementation Status
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F303RE | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | one PWM | |
|
||||
| | UART | three UART | |
|
||||
| | I2C | two I2C | |
|
||||
| | SPI | two SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | one 32 timer | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F303RE board includes an on-board ST-LINK V2 programmer.
|
||||
The easiest way to program the board is to use OpenOCD. Once you have
|
||||
installed OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD)
|
||||
for installation instructions), you can flash the board simply by typing.
|
||||
|
||||
```
|
||||
make flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F303RE board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
73
boards/nucleo-f303ze/doc.txt
Normal file
73
boards/nucleo-f303ze/doc.txt
Normal file
@ -0,0 +1,73 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f303ze STM32 Nucleo-F303ZE
|
||||
@ingroup boards_common_nucleo144
|
||||
@brief Support for the STM32 Nucleo-F303ZE
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F303 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F303RE
|
||||
microcontroller with 64Kb of RAM and 512Kb of ROM.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F303RE |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 64Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | up to 72MHz) |
|
||||
| FPU | yes |
|
||||
| Timers | 14 (13x 16-bit, 1x 32-bit [TIM2]) |
|
||||
| ADCs | 4x 12-bit |
|
||||
| UARTs | 5 |
|
||||
| SPIs | 4 |
|
||||
| I2Cs | 3 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00118585.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00043574.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/DM00046982.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
|
||||
|
||||
## Implementation Status
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F303RE | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | one PWM | |
|
||||
| | UART | three UART | |
|
||||
| | I2C | two I2C | |
|
||||
| | SPI | two SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | one 32 timer | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F303RE board includes an on-board ST-LINK V2 programmer.
|
||||
The easiest way to program the board is to use OpenOCD. Once you have
|
||||
installed OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD)
|
||||
for installation instructions), you can flash the board simply by typing.
|
||||
|
||||
```
|
||||
make flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F303RE board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
73
boards/nucleo-f334r8/doc.txt
Normal file
73
boards/nucleo-f334r8/doc.txt
Normal file
@ -0,0 +1,73 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f334r8 STM32 Nucleo-F334R8
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F334R8
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F334 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F334R8 microcontroller with 12Kb of RAM and 64Kb or ROM.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
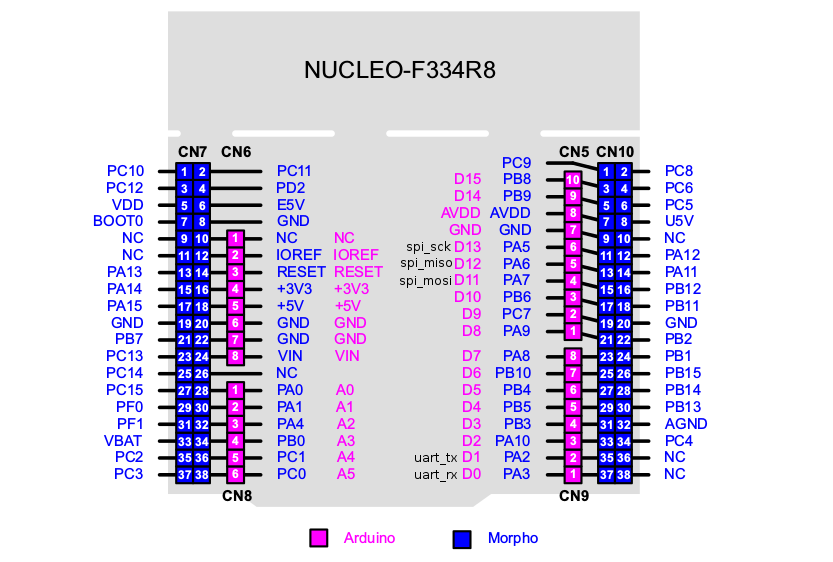
|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F091RC |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 12Kb |
|
||||
| Flash | 64Kb |
|
||||
| Frequency | up to 72MHz) |
|
||||
| FPU | yes |
|
||||
| Timers | 9 (8x 16-bit, 1x 32-bit [TIM2]) |
|
||||
| ADCs | 2x 12-bit |
|
||||
| UARTs | 8 |
|
||||
| SPIs | 1 |
|
||||
| I2Cs | 1 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/web/en/resource/technical/document/datasheet/DM00115237.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00031936.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/DM00051352.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
|
||||
|
||||
## Implementation Status
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F334R8 | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | no | |
|
||||
| | UART | one UART | |
|
||||
| | I2C | no | |
|
||||
| | SPI | one SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | one 32 timer | |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
The ST Nucleo-F334R8 board includes an on-board ST-LINK V2 programmer.
|
||||
The easiest way to program the board is to use OpenOCD. Once you have
|
||||
installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
For using the ST Nucleo-F334R8 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
87
boards/nucleo-f401re/doc.txt
Normal file
87
boards/nucleo-f401re/doc.txt
Normal file
@ -0,0 +1,87 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f401re STM32 Nucleo-F401RE
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F401RE
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F401 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F401RE microcontroller with 96Kb of SRAM and 512Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
|
||||
| MCU | STM32F401RE |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 96Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | up to 84MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 11 (2x watchdog, 1 SysTick, 6x 16-bit, 2x 32-bit [TIM2]) |
|
||||
| ADCs | 1x 12-bit |
|
||||
| UARTs | 3 |
|
||||
| SPIs | 4 |
|
||||
| I2Cs | 3 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/resource/en/datasheet/stm32f401re.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00031936.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/programming_manual/dm00046982.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/resource/en/user_manual/dm00105823.pdf)|
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F401RE | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (7 pins available)) | |
|
||||
| | UART | 2 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX) and USART6 on PA12(RX)/PA11(TX) |
|
||||
| | I2C | 1 I2C | |
|
||||
| | SPI | 1 SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | 2 32 bit timers | |
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The ST Nucleo-F401RE board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f401 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f401 debug
|
||||
```
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the ST Nucleo-F401 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-
|
||||
embedded)
|
||||
toolchain.
|
||||
|
||||
## Issues with old Hardware Revisions
|
||||
|
||||
Some Nucleo 64 Boards come in different hardware revisions, which is located
|
||||
on a sticker at the backside of the board. As discussed in issue
|
||||
[#6721](https://github.com/RIOT-OS/RIOT/issues/6721), there are some issues with
|
||||
the external clock sources in revisions smaller than `C-03`. (This would also be
|
||||
true for all boards with board ID `MB1136`).
|
||||
The revision `C-01` has a different configuration for the high speed external
|
||||
clock (HSE), which is used in RIOT. This could be fixed by reconfiguring some
|
||||
solder bridges as mentioned in the [user
|
||||
manual](http://www.st.com/resource/en/user_manual/dm00105823.pdf), section
|
||||
6.7.1.
|
||||
The other issue is, that revision `C-01` also has no 32kHz oscillator, so the
|
||||
RTC module of RIOT cannot be used.
|
||||
*/
|
||||
74
boards/nucleo-f410rb/doc.txt
Normal file
74
boards/nucleo-f410rb/doc.txt
Normal file
@ -0,0 +1,74 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f410rb STM32 Nucleo-F410RB
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F410RB
|
||||
|
||||
## Overview
|
||||
|
||||
Not yet available upstream, see [PR 6025](https://github.com/RIOT-OS/RIOT/pull/6025)
|
||||
|
||||
The Nucleo-F410 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F410RB microcontroller with 32Kb of SRAM and 128Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
|
||||
| MCU | STM32F410RB |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 128Kb |
|
||||
| Frequency | up to 100MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 9 (2x watchdog, 1 SysTick, 4x 16-bit, 1x 32-bit [TIM2] and 1 low power timer) |
|
||||
| ADCs | 1x 12-bit |
|
||||
| UARTs | 3 |
|
||||
| SPIs | 3 |
|
||||
| I2Cs | 3 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/resource/en/datasheet/stm32f410rb.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/reference_manual/dm00180366.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/programming_manual/dm00046982.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/resource/en/user_manual/dm00105823.pdf)|
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F410RB | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (no pin configured) | |
|
||||
| | UART | 2 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX) and USART1 on PA10(RX)/PA9(TX) |
|
||||
| | I2C | 1 I2C | |
|
||||
| | SPI | 1 SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | 2 32 bit timers | |
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The ST Nucleo-F410RB board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. You need OpenOCD in
|
||||
version
|
||||
0.10 minimum. Once you have installed OpenOCD (look
|
||||
[here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for installation
|
||||
instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f410 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f410 debug
|
||||
```
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the ST Nucleo-F410 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
*/
|
||||
73
boards/nucleo-f411re/doc.txt
Normal file
73
boards/nucleo-f411re/doc.txt
Normal file
@ -0,0 +1,73 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f411re STM32 Nucleo-F411RE
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F411RE
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F411 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F411RE microcontroller with 128Kb of SRAM and 512Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
|
||||
| MCU | STM32F411RE |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 128Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | up to 100MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 11 (2x watchdog, 1 SysTick, 6x 16-bit, 2x 32-bit [TIM2]) |
|
||||
| ADCs | 1x 12-bit |
|
||||
| UARTs | 3 |
|
||||
| SPIs | 5 |
|
||||
| I2Cs | 3 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet |
|
||||
[Datasheet](http://www.st.com/resource/en/datasheet/stm32f411re.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/reference_manual/dm00119316.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/resource/en/programming_manual/dm00046982.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/resource/en/user_manual/dm00105823.pdf)|
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F411RE | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (7 pins available)) | |
|
||||
| | UART | 3 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX), USART1 on PA10(RX)/PA9(TX) and USART6 on PA12(RX)/PA11(TX) |
|
||||
| | I2C | 1 I2C | |
|
||||
| | SPI | 1 SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | 1 32 bit timer (TIM5) | |
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The ST Nucleo-F411RE board includes an on-board ST-LINK V2-1 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f411 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f411 debug
|
||||
```
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the ST Nucleo-F411 board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-
|
||||
embedded)
|
||||
toolchain.
|
||||
*/
|
||||
2
boards/nucleo-f412zg/doc.txt
Normal file
2
boards/nucleo-f412zg/doc.txt
Normal file
@ -0,0 +1,2 @@
|
||||
/**
|
||||
*/
|
||||
2
boards/nucleo-f413zh/doc.txt
Normal file
2
boards/nucleo-f413zh/doc.txt
Normal file
@ -0,0 +1,2 @@
|
||||
/**
|
||||
*/
|
||||
2
boards/nucleo-f429zi/doc.txt
Normal file
2
boards/nucleo-f429zi/doc.txt
Normal file
@ -0,0 +1,2 @@
|
||||
/**
|
||||
*/
|
||||
73
boards/nucleo-f446re/doc.txt
Normal file
73
boards/nucleo-f446re/doc.txt
Normal file
@ -0,0 +1,73 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f446re STM32 Nucleo-F446RE
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-F446RE
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F446 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F446RE microcontroller with 128Kb of RAM and 512Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
|
||||
| MCU | STM32F446RE |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 128Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | up to 180MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 11 (2x watchdog, 1 SysTick, 12x 16-bit, 2x 32-bit [TIM2]) |
|
||||
| ADCs | 3x 12-bit |
|
||||
| UARTs | 4 |
|
||||
| SPIs | 4 |
|
||||
| I2Cs | 4 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet |
|
||||
[Datasheet](http://www.st.com/resource/en/datasheet/stm32f446re.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00031936.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/DM00051352.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F446RE | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (9 pins available) | |
|
||||
| | UART | 3 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX), USART3 on PC11(RX)/PC10(TX) and USART1 on PA10(RX)/PA9(TX) |
|
||||
| | I2C | one I2C | |
|
||||
| | SPI | one SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | one 32 bit timer | |
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The ST Nucleo-F446RE board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f446 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f446 debug
|
||||
```
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the ST Nucleo-F446RE board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-
|
||||
embedded)
|
||||
toolchain.
|
||||
*/
|
||||
73
boards/nucleo-f446ze/doc.txt
Normal file
73
boards/nucleo-f446ze/doc.txt
Normal file
@ -0,0 +1,73 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-f446ze STM32 Nucleo-F446ZE
|
||||
@ingroup boards_common_nucleo144
|
||||
@brief Support for the STM32 Nucleo-F446ZE
|
||||
|
||||
## Overview
|
||||
|
||||
The Nucleo-F446 is a board from ST's Nucleo family supporting a ARM Cortex-M4
|
||||
STM32F446RE microcontroller with 128Kb of RAM and 512Kb of ROM Flash.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
|
||||
| MCU | STM32F446RE |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 128Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | up to 180MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 11 (2x watchdog, 1 SysTick, 12x 16-bit, 2x 32-bit [TIM2]) |
|
||||
| ADCs | 3x 12-bit |
|
||||
| UARTs | 4 |
|
||||
| SPIs | 4 |
|
||||
| I2Cs | 4 |
|
||||
| RTC | 1 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet |
|
||||
[Datasheet](http://www.st.com/resource/en/datasheet/stm32f446re.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00031936.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/DM00051352.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM32F446RE | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes (9 pins available) | |
|
||||
| | UART | 3 UARTs | USART2 via STLink/USB or D0(RX)/D1(TX), USART3 on PC11(RX)/PC10(TX) and USART1 on PA10(RX)/PA9(TX) |
|
||||
| | I2C | one I2C | |
|
||||
| | SPI | one SPI | |
|
||||
| | USB | no | |
|
||||
| | Timer | one 32 bit timer | |
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The ST Nucleo-F446RE board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make BOARD=nucleo-f446 flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make BOARD=nucleo-f446 debug
|
||||
```
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the ST Nucleo-F446RE board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-
|
||||
embedded)
|
||||
toolchain.
|
||||
*/
|
||||
2
boards/nucleo-f722ze/doc.txt
Normal file
2
boards/nucleo-f722ze/doc.txt
Normal file
@ -0,0 +1,2 @@
|
||||
/**
|
||||
*/
|
||||
2
boards/nucleo-f746zg/doc.txt
Normal file
2
boards/nucleo-f746zg/doc.txt
Normal file
@ -0,0 +1,2 @@
|
||||
/**
|
||||
*/
|
||||
2
boards/nucleo-f767zi/doc.txt
Normal file
2
boards/nucleo-f767zi/doc.txt
Normal file
@ -0,0 +1,2 @@
|
||||
/**
|
||||
*/
|
||||
2
boards/nucleo-l031k6/doc.txt
Normal file
2
boards/nucleo-l031k6/doc.txt
Normal file
@ -0,0 +1,2 @@
|
||||
/**
|
||||
*/
|
||||
5
boards/nucleo-l053r8/doc.txt
Normal file
5
boards/nucleo-l053r8/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-l053r8 STM32 Nucleo-L053R8
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-L053R8
|
||||
*/
|
||||
5
boards/nucleo-l073rz/doc.txt
Normal file
5
boards/nucleo-l073rz/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-l073rz STM32 Nucleo-L073RZ
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-L073RZ
|
||||
*/
|
||||
70
boards/nucleo-l152re/doc.txt
Normal file
70
boards/nucleo-l152re/doc.txt
Normal file
@ -0,0 +1,70 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-l152re STM32 Nucleo-L152RE
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-L152RE
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32L152RE |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 80Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | 32MHz (no external oscilator connected) |
|
||||
| FPU | no |
|
||||
| Timers | 8 (8x 16-bit, 1x 32-bit [TIM5]) |
|
||||
| ADCs | 1x 42-channel 12-bit |
|
||||
| UARTs | 3 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| Vcc | 1.65V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00098321.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/resource/en/reference_manual/cd00240193.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/CD00228163.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00105823.pdf)|
|
||||
|
||||
### User Interface
|
||||
|
||||
2 Button:
|
||||
|
||||
| NAME | USER | RESET |
|
||||
|:----- |:----- |:--------- |
|
||||
| Pin | PC13 (IN) | NRST |
|
||||
|
||||
1 LEDs:
|
||||
|
||||
| NAME | LD2 |
|
||||
| ----- | ----- |
|
||||
| Color | green |
|
||||
| Pin | PA5 |
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the st-nucleo-l1 board we strongly recommend the usage of the [GNU
|
||||
Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
|
||||
### OpenOCD
|
||||
|
||||
Please use an OpenOCD version checked out after Jan. 26th 2015. Building
|
||||
instructions can be found [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD).
|
||||
|
||||
## Using UART
|
||||
|
||||
Using the UART isn't too stable right now. For some using the USB interface
|
||||
just works, others have to connect the USB interface to a active USB hub and
|
||||
others again can only transmit over the USB interface and receive using an
|
||||
external UART adapter.
|
||||
|
||||
#### Connecting an external UART adapter
|
||||
|
||||
1. connect your usb tty to the st-link header as marked
|
||||

|
||||
2. done
|
||||
*/
|
||||
2
boards/nucleo-l432kc/doc.txt
Normal file
2
boards/nucleo-l432kc/doc.txt
Normal file
@ -0,0 +1,2 @@
|
||||
/**
|
||||
*/
|
||||
5
boards/nucleo-l452re/doc.txt
Normal file
5
boards/nucleo-l452re/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-l452re STM32 Nucleo-L452RE
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-L452RE
|
||||
*/
|
||||
28
boards/nucleo-l476rg/doc.txt
Normal file
28
boards/nucleo-l476rg/doc.txt
Normal file
@ -0,0 +1,28 @@
|
||||
/**
|
||||
@defgroup boards_nucleo-l476rg STM32 Nucleo-L476RG
|
||||
@ingroup boards_common_nucleo64
|
||||
@brief Support for the STM32 Nucleo-L476RG
|
||||
|
||||
### MCU
|
||||
|
||||
|
||||
| MCU | |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | |
|
||||
| Flash | |
|
||||
| Frequency | |
|
||||
| FPU | |
|
||||
| Timers | |
|
||||
| ADCs | |
|
||||
| UARTs | |
|
||||
| SPIs | |
|
||||
| I2Cs | |
|
||||
| RTC | |
|
||||
| Vcc | |
|
||||
| Datasheet | |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/content/ccc/resource/technical/document/reference_manual/02/35/09/0c/4f/f7/40/03/DM00083560.pdf/files/DM00083560.pdf/jcr:content/translations/en.DM00083560.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/content/ccc/resource/technical/document/programming_manual/6c/3a/cb/e7/e4/ea/44/9b/DM00046982.pdf/files/DM00046982.pdf/jcr:content/translations/en.DM00046982.pdf) |
|
||||
| Board Manual | |
|
||||
*/
|
||||
@ -1,5 +1,5 @@
|
||||
/**
|
||||
* @defgroup boards_nucleo-l496zg STM32 Nucleo-L496ZG
|
||||
* @ingroup boards_common_nucleo144
|
||||
* @brief Support for the STM32 Nucleo-l496zg
|
||||
*/
|
||||
@defgroup boards_nucleo-l496zg STM32 Nucleo-L496ZG
|
||||
@ingroup boards_common_nucleo144
|
||||
@brief Support for the STM32 Nucleo-l496zg
|
||||
*/
|
||||
|
||||
105
boards/nz32-sc151/doc.txt
Normal file
105
boards/nz32-sc151/doc.txt
Normal file
@ -0,0 +1,105 @@
|
||||
/**
|
||||
@defgroup boards_nz32-sc151 NZ32-SC151
|
||||
@ingroup boards
|
||||
@brief Support for the Modtronix nz32-sc151 board.
|
||||
|
||||
This board provider is [modtronix](www.modtronix.com). They don't supply data
|
||||
sheet's but there wiki can be found
|
||||
[HERE](http://wiki.modtronix.com/doku.php?id=products:nz-stm32:nz32-sc151). The
|
||||
schematic for there board can be found
|
||||
[HERE](http://modtronix.com/prod/nz32/nz32-sc151/nz32-sc151-r1.pdf).
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32L151RC |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | 32MHz|
|
||||
| FPU | no |
|
||||
| Timers | 11 (8x 16-bit,2x 16-bit basic timers, 2x watchdog timers, 1x 32-bit [TIM5]) |
|
||||
| ADCs | 1x 25-channel 12-bit |
|
||||
| DACs | 1x 2-channel 12-bit |
|
||||
| USB 2.0 | 1 |
|
||||
| UARTs | 3 |
|
||||
| SPIs | 3 |
|
||||
| I2Cs | 2 |
|
||||
| Vcc | 1.65V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/content/ccc/resource/technical/document/datasheet/2a/6e/97/91/cd/c0/43/8b/DM00048356.pdf/files/DM00048356.pdf/jcr:content/translations/en.DM00048356.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/content/ccc/resource/technical/document/reference_manual/cc/f9/93/b2/f0/82/42/57/CD00240193.pdf/files/CD00240193.pdf/jcr:content/translations/en.CD00240193.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/content/ccc/resource/technical/document/programming_manual/5b/ca/8d/83/56/7f/40/08/CD00228163.pdf/files/CD00228163.pdf/jcr:content/translations/en.CD00228163.pdf) |
|
||||
| Board WIKI | [WIKI nz32-sc151](https://wiki.modtronix.com/doku.php?id=products:nz-stm32:nz32-sc151#schematics)|
|
||||
|
||||
### User Interface
|
||||
|
||||
2 Button:
|
||||
|
||||
| NAME | BOOT | RESET |
|
||||
|:----- |:----- |:--------- |
|
||||
| Pin | BOOT0 | NRST |
|
||||
|
||||
1 LED:
|
||||
|
||||
| NAME | LED |
|
||||
| ----- | ----- |
|
||||
| Color | red |
|
||||
| Pin | PB2 |
|
||||
|
||||
## Using UART
|
||||
|
||||
This board doesn't open an UART or serial interface threw the USB
|
||||
automatically, and the USB device driver hasn't been implemented to RIOT yet.
|
||||
Therefore, to open an UART interface one hast to connect a usb/ttl converter to
|
||||
the UART3 pins PB11 (RX3) and PB10 (TX3).
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The standard method for flashing RIOT to the nz32-sc151 is using dfu. On
|
||||
linux you must get dfu-util package v.8.0 or newer. You can try:
|
||||
|
||||
```
|
||||
sudo apt-get install dfu-util
|
||||
```
|
||||
|
||||
but most repos install older versions, therefore you should clone from [dfu-
|
||||
util](git clone git://git.code.sf.net/p/dfu-util/dfu-util) and follow building
|
||||
instructions [HERE](
|
||||
http://dfu-util.sourceforge.net/build.html).
|
||||
|
||||
Once dfu-util is installed you can just flash as a normal board, although
|
||||
sudo privileges are required.
|
||||
|
||||
```
|
||||
sudo make BOARD=nz32-sc151 flash
|
||||
```
|
||||
|
||||
NOTE: this only works for linux, for windows you can use [ST Microelectronics
|
||||
DFU Bootloader](http://www.st.com/en/development-tools/stsw-stm32080.html)
|
||||
although you will need to build the files independently.
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | stm32l1 | partly | Energy saving modes not implemented |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | DAC | yes | |
|
||||
| | UART | yes | |
|
||||
| | I2C | yes |I2C1|
|
||||
| | SPI | yes | |
|
||||
| | ADC | yes | Only 5 enabled PC0, PC1, PC2, and two internal ADC channels|
|
||||
| | USB | no | |
|
||||
| | RTT | no | |
|
||||
| | PWM | yes | On PC6, PC7, PC8, PC9|
|
||||
| | RTC | yes | |
|
||||
| | RNG | no | |
|
||||
| | Timer | yes | |
|
||||
*/
|
||||
5
boards/opencm904/doc.txt
Normal file
5
boards/opencm904/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_opencm904 OpenCM9.04
|
||||
@ingroup boards
|
||||
@brief Support for the OpenCM9.04 board
|
||||
*/
|
||||
61
boards/openmote-cc2538/doc.txt
Normal file
61
boards/openmote-cc2538/doc.txt
Normal file
@ -0,0 +1,61 @@
|
||||
/**
|
||||
@defgroup boards_openmote-cc2538 OpenMote-cc2538
|
||||
@ingroup boards
|
||||
@brief Support for the OpenMote-cc2538 board
|
||||
|
||||
## Overview
|
||||
|
||||
The [OpenMote](http://www.openmote.com/) is slim board that comes with a TI
|
||||
SoC combining an ARM Cortex-M3 microcontroller with an IEEE802.15.4 radio.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
| MCU | CC2538SF53 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | Texas Instruments |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 512Kb |
|
||||
| Frequency | 32MHz |
|
||||
| FPU | no |
|
||||
| Timers | 4 |
|
||||
| ADCs | 1x 12-bit (8 channels) |
|
||||
| UARTs | 2 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 1 |
|
||||
| Vcc | 2V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.ti.com/lit/gpn/cc2538) (pdf file) |
|
||||
| Reference Manual | [Reference Manual](http://www.ti.com/lit/pdf/swru319) |
|
||||
|
||||
The OpenMote can be used with an "OpenBase" which provides an RJ-45, 2 x USB
|
||||
mini ports, a JTAG header, and two pin headers which provide access to the
|
||||
microprocessor pins. For example, the pins labelled DOUT/DIN provide access to
|
||||
the UART Tx/Rx respectively. This UART is connected to the "USB_FTDI" port via
|
||||
an FTDI FT232RQ UART/USB driver chip.
|
||||
|
||||
## Flashing and Debugging
|
||||
|
||||
Currently RIOT supports flashing the OpenMote using a Segger JLink JTAG
|
||||
adapter or via USB, using the bootloader on the board.
|
||||
|
||||
### Flashing via USB
|
||||
|
||||
To flash via USB, connect the "ON/SLEEP" pin to ground, and reset the board
|
||||
into the bootloader by pressing the reset button ("BUT1"). Then call "make
|
||||
flash" from your application directory.
|
||||
|
||||
### Flashing via JTAG
|
||||
|
||||
To be able to flash the board via JTAG you need to install Seggers JLinkExe
|
||||
tool. Once you have this in place, you can simply flash by calling
|
||||
|
||||
`make flash`
|
||||
|
||||
from your application folder.
|
||||
|
||||
Mac OS users may experiment a command line expecting `connect`. Just type it
|
||||
and the process will continue.
|
||||
*/
|
||||
59
boards/pba-d-01-kw2x/doc.txt
Normal file
59
boards/pba-d-01-kw2x/doc.txt
Normal file
@ -0,0 +1,59 @@
|
||||
/**
|
||||
@defgroup boards_pba-d-01-kw2x phyWAVE-KW22 Board
|
||||
@ingroup boards
|
||||
@brief Support for the phyWAVE evaluation board
|
||||
|
||||
## Manufacturer
|
||||
Designed and produced by PHYTEC Messtechnik GmbH, D-55129 Mainz.
|
||||
[Homepage](http://www.phytec.de) | Ordering information via mail at
|
||||
contact@phytec.de
|
||||
|
||||
## Overview
|
||||
The [Phytec IoT wiki](https://github.com/PHYTEC-Messtechnik-GmbH/phynode-riot-examples/wiki)
|
||||
describes the phyWAVE module and the phyNODE board more
|
||||
detailed. The links below will guide you directly to the corresponding chapter:
|
||||
* [Overview](https://github.com/PHYTEC-Messtechnik-GmbH/phynode-riot-examples/wiki/)
|
||||
* [Introduction](https://github.com/PHYTEC-Messtechnik-GmbH/phynode-riot-examples/wiki/Introduction)
|
||||
* Hardware descriptions for the
|
||||
[phyWAVE](https://github.com/PHYTEC-Messtechnik-GmbH/phynode-riot-examples/wiki/phyWAVE-KW2x-Characteristics)
|
||||
and the
|
||||
[phyNODE](https://github.com/PHYTEC-Messtechnik-GmbH/phynode-riot-examples/wiki/phyNODE-Characteristics)
|
||||
* [Toolchain, build and debug Information](https://github.com/PHYTEC-Messtechnik-GmbH/phynode-riot-examples/wiki/RIOT-getting-started#toolchain-summary)
|
||||
* [A detailed step-by-step Guide that explains how to set up the Environment](https://github.com/PHYTEC-Messtechnik-GmbH/phynode-riot-examples/wiki/RIOT-getting-started#step-by-step-installation-guide)
|
||||
The implementation status of the phyWAVE and phyNODE peripherals are listed
|
||||
below. You can find links to the corresponding Pull Requests which may give you
|
||||
a code reference.
|
||||
|
||||
<img src="https://raw.githubusercontent.com/jremmert-phytec-iot/Pictures_Phytec_IOT/master/EvalBoard_3.png" width="800" />
|
||||
phyNODE board with equipped phyWAVE-KW2x processor/radio-module.
|
||||
|
||||
### Details
|
||||
The PCB-pieces with the mounted sensors can be separated from the evaluation
|
||||
board to capture sensor values from specific spatial points.
|
||||
|
||||
[Pinout reference](https://github.com/PHYTEC-Messtechnik-GmbH/phynode-riot-examples/wiki/Interfaces)
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | [MKW22D512](http://www.freescale.com/webapp/sps/site/prod_summary.jsp?code=KW2x) | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265) |
|
||||
| phyWAVE board support | [phyWAVE](http://www.phytec.de/de/produkte/internet-of-things/phywave.html) | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2059) |
|
||||
| Low-level driver | GPIO | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265)|
|
||||
| | PWM | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265)|
|
||||
| | UART | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265)|
|
||||
| | I2C | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265)|
|
||||
| | SPI | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265) |
|
||||
| | USB-Device | yes | [WIP](https://github.com/RIOT-OS/RIOT/pull/3890)|
|
||||
| | RTT | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265) |
|
||||
| | RNG | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265) |
|
||||
| | Timer | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2265) |
|
||||
| Radio Chip | integrated | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2756) |
|
||||
| Humidity Sensor | [HDC1000](http://www.ti.com/lit/ds/symlink/hdc1000.pdf) | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2070) |
|
||||
| Pressure Sensor | [MPL3115A2](http://www.nxp.com/products/sensors/pressure-sensors/barometric-pressure-15-to-115-kpa/20-to-110kpa-absolute-digital-pressure-sensor:MPL3115A2?) | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2123) |
|
||||
| Tri-axis Accelerometer | [MMA8652FC](http://www.nxp.com/products/sensors/accelerometers/3-axis-accelerometers/2g-4g-8g-low-g-12-bit-digital-accelerometer:MMA8652FC) | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2119) |
|
||||
| Magnetometer | [MAG3110FCR1](http://www.nxp.com/products/sensors/magnetometers/sample-data-sets-for-inertial-and-magnetic-sensors/freescale-high-accuracy-3d-magnetometer:MAG3110) | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2121) |
|
||||
| Light Sensor | [TCS3772](https://ams.com/jpn/content/download/291143/1065677/file/TCS3772_Datasheet_EN_v1.pdf) | yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/3135) |
|
||||
| IR-Termopile Sensor | [TMP006](http://www.ti.com/product/TMP006) |yes | [mainline](https://github.com/RIOT-OS/RIOT/pull/2148) |
|
||||
| Capacitive Button | PCB | no | planned |
|
||||
*/
|
||||
18
boards/pic32-clicker/doc.txt
Normal file
18
boards/pic32-clicker/doc.txt
Normal file
@ -0,0 +1,18 @@
|
||||
/**
|
||||
@defgroup boards_pic32-clicker MikroE PIC32 Clicker
|
||||
@ingroup boards
|
||||
@brief Support for the MikroE PIC32 Clicker
|
||||
|
||||
For instructions on reflashing see:
|
||||
|
||||
https://docs.creatordev.io/clicker/guides/quick-start-guide/#programming-a-6lowpan-clicker
|
||||
|
||||
The RIOT build generates a hexfile compatible with MPLAB-IPE.
|
||||
|
||||
More general information on the board and related documentation can be found
|
||||
here:
|
||||
|
||||
https://docs.creatordev.io/clicker/guides/quick-start-guide/#introduction
|
||||
|
||||
|
||||
*/
|
||||
21
boards/pic32-wifire/doc.txt
Normal file
21
boards/pic32-wifire/doc.txt
Normal file
@ -0,0 +1,21 @@
|
||||
/**
|
||||
@defgroup boards_pic32-wifire Digilent PIC32 WiFire
|
||||
@ingroup boards
|
||||
@brief Support for the Digilent PIC32 WiFire
|
||||
|
||||
For instructions on reflashing see:
|
||||
|
||||
https://docs.creatordev.io/wifire/guides/wifire-programming/
|
||||
|
||||
The RIOT build generates a hexfile compatible with MPLAB-IPE.
|
||||
|
||||
More general information on the board and related documentation can be found
|
||||
here:
|
||||
|
||||
https://creatordev.io/wifire.html
|
||||
|
||||
https://docs.creatordev.io/wifire/
|
||||
|
||||
|
||||
|
||||
*/
|
||||
5
boards/remote-pa/doc.txt
Normal file
5
boards/remote-pa/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_remote-pa Re-Mote Prototype A
|
||||
@ingroup boards
|
||||
@brief Support for the Re-Mote board prototype A
|
||||
*/
|
||||
89
boards/remote-reva/doc.txt
Normal file
89
boards/remote-reva/doc.txt
Normal file
@ -0,0 +1,89 @@
|
||||
/**
|
||||
@defgroup boards_remote-reva RE-Mote Revision A
|
||||
@ingroup boards
|
||||
@brief Support for the RE-Mote board Revision A
|
||||
|
||||
The `RE-Mote` has three versions, a first prototype A (`remote-pa`) only
|
||||
distributed to beta testers, its following revision A (`remote-reva`), and the
|
||||
latest revision B (`remote-revb`) which are commercially available. The
|
||||
following section focuses on the revision A.
|
||||
|
||||
The official RE-Mote wiki page is maintained by Zolertia at:
|
||||
|
||||
https://github.com/Zolertia/Resources/wiki
|
||||
|
||||
# Components
|
||||
|
||||
| MCU | [CC2538 (ARM Cortex-M3 with on-board 2.4GHz radio)](http://www.ti.com/product/CC2538) |
|
||||
|-------|-----------------------------------------------------------------------------------------------------|
|
||||
| Radio | Two radio interfaces (IEEE 802.15.4): [2.4GHz](http://www.ti.com/product/CC2538) and [863-950MHz](http://www.ti.com/product/CC1200) |
|
||||
| | RP-SMA connector for external antenna (with a RF switch to select either 2.4GHz/Sub-GHz radio) |
|
||||
| USB-to-Serial | [CP2104](https://www.silabs.com/products/interface/Pages/cp2104-mini.aspx) |
|
||||
| Peripherals | RTCC, built-in battery charger for LiPo batteries, External WDT (optional), Micro-SD |
|
||||
| Others | RGB LED, power management block (150nA when the mote is shutdown)|
|
||||
|
||||
# Porting status
|
||||
|
||||
In terms of hardware support, the following drivers have been implemented:
|
||||
|
||||
* CC2538 System-on-Chip:
|
||||
* UART
|
||||
* Random number generator
|
||||
* Low Power Modes
|
||||
* General-Purpose Timers
|
||||
* I2C/SPI library
|
||||
* LEDs
|
||||
* Buttons
|
||||
* RF 2.4GHz built-in in CC2538
|
||||
* RF switch to programatically drive either 2.4GHz or sub-1GHz to a single
|
||||
RP-SMA
|
||||
|
||||
And under work or pending at cc2538 base cpu:
|
||||
|
||||
* Built-in core temperature and battery sensor.
|
||||
* CC1200 sub-1GHz radio interface.
|
||||
* Micro-SD external storage.
|
||||
* ADC
|
||||
* USB (in CDC-ACM).
|
||||
* uDMA Controller.
|
||||
|
||||
# Layout
|
||||
|
||||

|
||||
|
||||
# Flashing
|
||||
|
||||
The RE-Mote has built-in support to flash over USB using the BSL. Previous
|
||||
versions required to unlock the bootloader by manually pressing the `user
|
||||
button` and `reset button`, but the current version handles the sequence with an
|
||||
on-board PIC, so automatically unlocks the bootloader upon flashing.
|
||||
|
||||
e.g.
|
||||
```
|
||||
Bash
|
||||
$ make BOARD=remote-reva flash
|
||||
```
|
||||
|
||||
The RE-Mote in its current Revision A has the following pin-out:
|
||||
|
||||
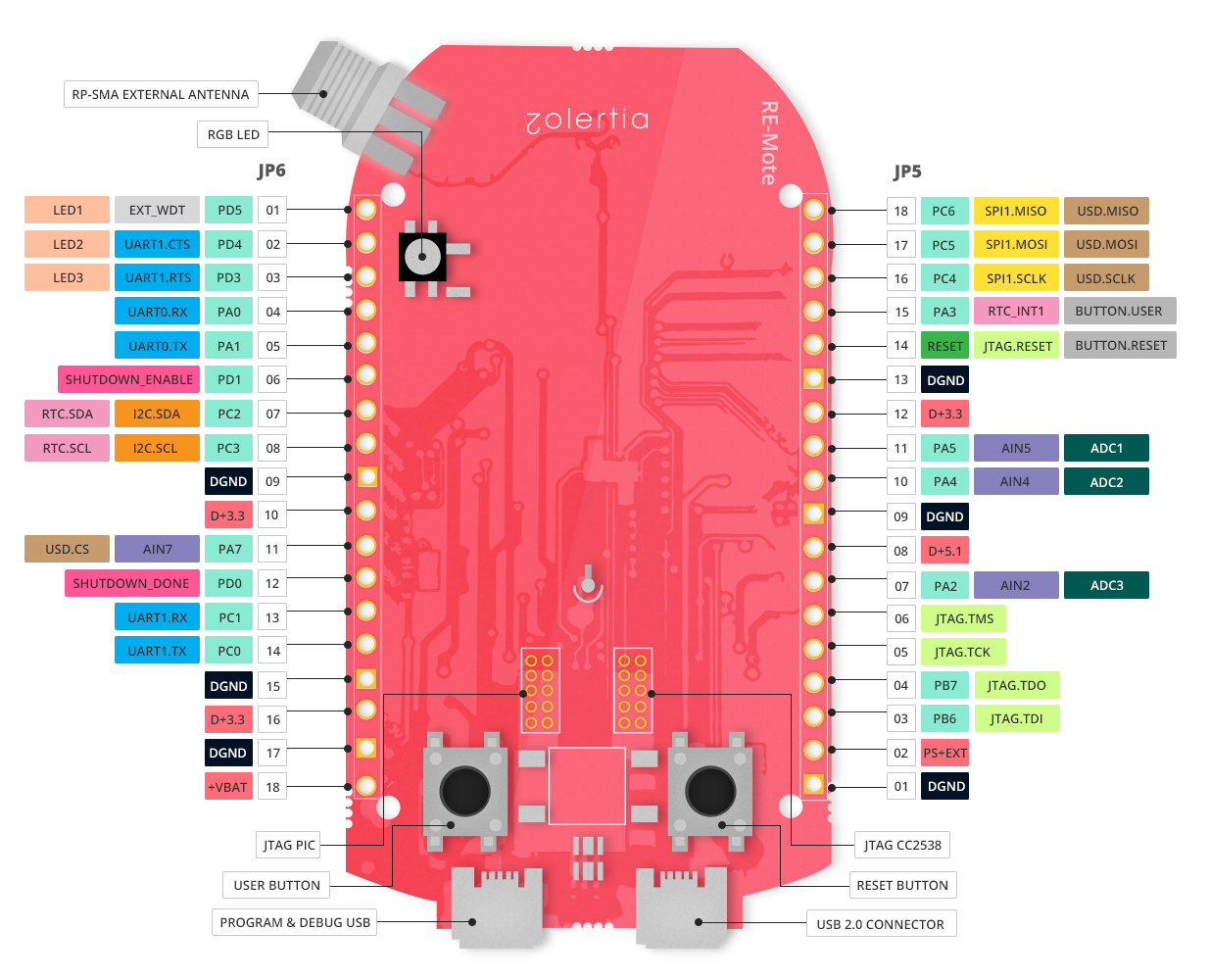
|
||||
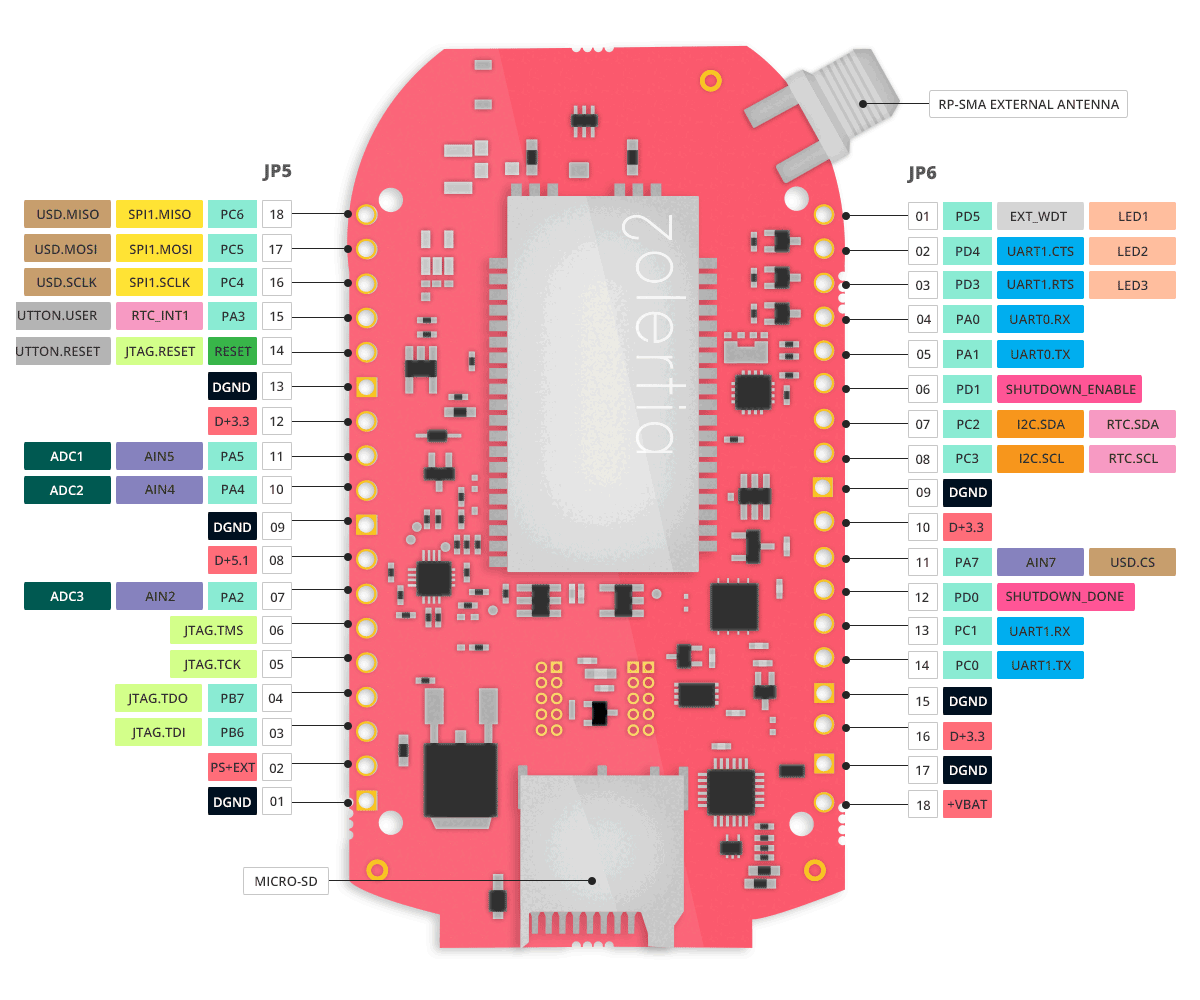
|
||||
|
||||
# Pin out and connectors
|
||||
|
||||
## RE-Mote ports and connectors
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## RE-Mote on-board connectors pin-out
|
||||
|
||||
The RE-Mote uses the [Molex 5-pin WM4903-ND male header connector](http://datasheets.globalspec.com/ds/5843/DigiKey/6D12815C-098E-40A3-86A0-22A3C50B75BA) to
|
||||
connect digital sensors based on I2C and SPI protocols, as well as other sensors
|
||||
or actuators you may need to connect. The pins are 2.54 mm spaced and the
|
||||
connector has the following pin-out:
|
||||
|
||||

|
||||

|
||||
*/
|
||||
5
boards/remote-revb/doc.txt
Normal file
5
boards/remote-revb/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_remote-revb RE-Mote Revision B
|
||||
@ingroup boards
|
||||
@brief Support for the RE-Mote board Revision B
|
||||
*/
|
||||
5
boards/ruuvitag/doc.txt
Normal file
5
boards/ruuvitag/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_ruuvitag RuuviTag
|
||||
@ingroup boards
|
||||
@brief Support for the RuuviTag board
|
||||
*/
|
||||
108
boards/samd21-xpro/doc.txt
Normal file
108
boards/samd21-xpro/doc.txt
Normal file
@ -0,0 +1,108 @@
|
||||
/**
|
||||
@defgroup boards_samd21-xpro Atmel SAM D21 Xplained Pro
|
||||
@ingroup boards
|
||||
@brief Support for the Atmel SAM D21 Xplained Pro board.
|
||||
|
||||
## Overview
|
||||
|
||||
The `SAMD21 Xplained Pro` is an ultra-low power evaluation board by Atmel
|
||||
featuring an ATSAMD21J18A SoC. The SoC includes a SAMD21 ARM Cortex-M0+ micro-
|
||||
controller. For programming the MCU comes with 32Kb of RAM and 256Kb of flash
|
||||
memory.
|
||||
|
||||
The samd21-xpro is available from various hardware vendors for ~30USD (as of
|
||||
2017May).
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | ATSAMD21J18A |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0+ |
|
||||
| Vendor | Atmel |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | up to 48MHz |
|
||||
| FPU | no |
|
||||
| Timers | 5 (16-bit) |
|
||||
| ADCs | 1x 12-bit (20 channels) |
|
||||
| UARTs | max 6 (shared with SPI and I2C) |
|
||||
| SPIs | max 6 (see UART) |
|
||||
| I2Cs | max 6 (see UART) |
|
||||
| Vcc | 1.62V - 3.63V |
|
||||
| Datasheet | [Datasheet](http://ww1.microchip.com/downloads/en/DeviceDoc/40001882A.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.atmel.com/Images/Atmel-42220-SAMD21-Xplained-Pro_User-Guide.pdf)|
|
||||
|
||||
### User Interface
|
||||
|
||||
1 User button and 1 LED:
|
||||
|
||||
| Device | PIN |
|
||||
|:------ |:--- |
|
||||
| LED0 | PB30 |
|
||||
| SW0 (button) | PA15 |
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | samd21 | partly | DFLL clock not implemented |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | ADC | yes | |
|
||||
| | PWM | yes | |
|
||||
| | UART | yes | |
|
||||
| | I2C | unknown | |
|
||||
| | SPI | yes | |
|
||||
| | USB | no | |
|
||||
| | RTT | yes | |
|
||||
| | RTC | yes | |
|
||||
| | RNG | unknown | |
|
||||
| | Timer | yes | |
|
||||
|
||||
|
||||
|
||||
## Flashing the device
|
||||
|
||||
Connect the device to your Micro-USB cable using the port labeled as *DEBUG
|
||||
USB*.
|
||||
|
||||
The standard method for flashing RIOT to the samd21-xpro is using OpenOCD.
|
||||
|
||||
Refer to https://github.com/RIOT-OS/RIOT/wiki/OpenOCD for general
|
||||
instructions on building OpenOCD and make sure "cmsis-dap" and "hidapi-libusb"
|
||||
are enabled.
|
||||
|
||||
On Linux you will have to add a **udev** rule for hidraw, like
|
||||
```
|
||||
bash
|
||||
echo 'KERNEL=="hidraw*", SUBSYSTEM=="hidraw", MODE="0664", GROUP="plugdev"' \
|
||||
| sudo tee -a /etc/udev/rules.d/99-usb.rules
|
||||
sudo service udev restart
|
||||
```
|
||||
|
||||
### Arch Linux
|
||||
With yaourt:
|
||||
```
|
||||
yaourt -S hidapi-git
|
||||
yaourt -S openocd-git
|
||||
# edit PKGBUILD, add "cmsis-dap hidapi-libusb" to "_features"
|
||||
```
|
||||
|
||||
### Ubuntu
|
||||
Although this refers to setting up the SAMR21, this guide is still very
|
||||
helpful to understanding how to set up a solid RIOT development environment for
|
||||
the SAMD21: http://watr.li/samr21-dev-setup-ubuntu.html
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the samd21-xpro board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
|
||||
## Known Issues / Problems
|
||||
|
||||
*/
|
||||
130
boards/saml21-xpro/doc.txt
Normal file
130
boards/saml21-xpro/doc.txt
Normal file
@ -0,0 +1,130 @@
|
||||
/**
|
||||
@defgroup boards_saml21-xpro Atmel SAM L21 Xplained Pro
|
||||
@ingroup boards
|
||||
@brief Support for the Atmel SAM L21 Xplained Pro board.
|
||||
|
||||
## Overview
|
||||
|
||||
The `SAML21 Xplained Pro` is an ultra-low power evaluation board by Atmel
|
||||
featuring a ATSAML21J18A SoC. The SoC includes a SAML21 ARM Cortex-M0+ micro-
|
||||
controller. For programming the MCU comes with 32Kb of RAM and 256Kb of flash
|
||||
memory.
|
||||
|
||||
The saml21-xpro is available from various hardware vendors for ~50USD (as of
|
||||
oct. 2015).
|
||||
|
||||
*Please note:* ATMEL's most recent SAML21s are the `B` variant, or
|
||||
`ATSAML21J18B`. Because the driver changes are mostly small, throughout this
|
||||
reference the device will continue to be referred to as the `ATSAML21J18[A/B]`
|
||||
indiscriminately;
|
||||
|
||||
## Hardware
|
||||
|
||||
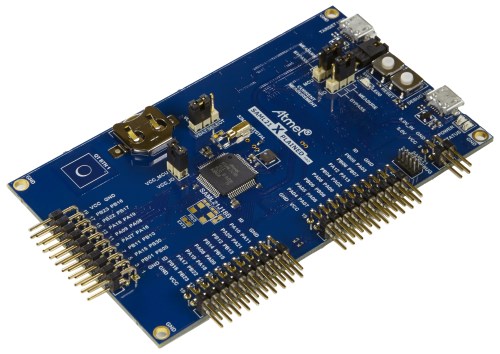
|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | ATSAML21J18A |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0+ |
|
||||
| Vendor | Atmel |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | up to 48MHz |
|
||||
| FPU | no |
|
||||
| Timers | 8 (16-bit) |
|
||||
| ADCs | 1x 12-bit (20 channels) |
|
||||
| UARTs | max 6 (shared with SPI and I2C) |
|
||||
| SPIs | max 6 (see UART) |
|
||||
| I2Cs | max 6 (see UART) |
|
||||
| Vcc | 1.8V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.atmel.com/Images/Atmel-42385-SAM-L21-Datasheet.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.atmel.com/Images/Atmel-42405-SAML21-Xplained-Pro_User-Guide.pdf)|
|
||||
|
||||
### User Interface
|
||||
|
||||
1 User button and 1 LED:
|
||||
|
||||
| Device | PIN |
|
||||
|:------ |:--- |
|
||||
| LED0 | PB10 |
|
||||
| SW0 (button) | PA02 |
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | saml21 | partly | PLL clock not implemented |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | no | |
|
||||
| | UART | yes | |
|
||||
| | I2C | yes | |
|
||||
| | SPI | yes | |
|
||||
| | USB | no | |
|
||||
| | RTT | yes | |
|
||||
| | RTC | yes | |
|
||||
| | RNG | no | |
|
||||
| | Timer | yes | |
|
||||
| | ADC | yes | |
|
||||
|
||||
|
||||
|
||||
## Flashing the device
|
||||
|
||||
Connect the device to your Micro-USB cable using the port labeled as *EDBG*.
|
||||
|
||||
The standard method for flashing RIOT to the saml21-xpro is using OpenOCD.
|
||||
Please note that even the latest official OpenOCD (v0.9 at the time of this
|
||||
writing) does not support B-variant SAML21 devices.
|
||||
|
||||
If you attempt to flash a board, and OpenOCD throws a `Couldn't find part
|
||||
correspoding to DID XXXXXXXX` error, you will need to compile your own OpenOCD
|
||||
from source.
|
||||
|
||||
Refer to https://github.com/RIOT-OS/RIOT/wiki/OpenOCD for general
|
||||
instructions on building OpenOCD and make sure "cmsis-dap" and "hidapi-libusb"
|
||||
are enabled.
|
||||
|
||||
On Linux you will have to add a **udev** rule for hidraw, like
|
||||
```
|
||||
bash
|
||||
echo 'KERNEL=="hidraw*", SUBSYSTEM=="hidraw", MODE="0664", GROUP="plugdev"' \
|
||||
| sudo tee -a /etc/udev/rules.d/99-usb.rules
|
||||
sudo service udev restart
|
||||
```
|
||||
|
||||
### Arch Linux
|
||||
With yaourt:
|
||||
```
|
||||
yaourt -S hidapi-git
|
||||
yaourt -S openocd-git
|
||||
# edit PKGBUILD, add "cmsis-dap hidapi-libusb" to "_features"
|
||||
```
|
||||
|
||||
### Ubuntu
|
||||
Although this refers to setting up the SAMR21, this guide is still very
|
||||
helpful to understanding how to set up a solid RIOT development environment for
|
||||
the SAML21: http://watr.li/samr21-dev-setup-ubuntu.html
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the saml21-xpro board we strongly recommend the usage of the [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
|
||||
|
||||
## Known Issues / Problems
|
||||
|
||||
### Stack sizes
|
||||
The default stack sizes have not been tuned properly yet. If in doubt why
|
||||
your application crashes try increasing the default stack sizes and use `ps` to
|
||||
find out how much stack is being used.
|
||||
Tracked in https://github.com/RIOT-OS/RIOT/issues/2228
|
||||
|
||||
### Not flashable by OpenOCD anymore
|
||||
It can happen that OpenOCD is not able to program the board, because of wrong
|
||||
clock configuration or low power modes. In this case you can use
|
||||
[this little tool](https://github.com/ataradov/edbg) to erase the flash. Just follow the
|
||||
instructions to build it and run `./edbg -e` to erase the flash. Then press the
|
||||
reset button and you're able to program via OpenOCD again.
|
||||
*/
|
||||
199
boards/samr21-xpro/doc.txt
Normal file
199
boards/samr21-xpro/doc.txt
Normal file
@ -0,0 +1,199 @@
|
||||
/**
|
||||
@defgroup boards_samr21-xpro Atmel SAM R21 Xplained Pro
|
||||
@ingroup boards
|
||||
@brief Support for the Atmel SAM R21 Xplained Pro board.
|
||||
|
||||
## Overview
|
||||
|
||||
The `SAMR21 Xplained Pro` is a compact evaluation board by Atmel featuring a
|
||||
ATSAMR21G18A SoC. The SoC includes a SAMD21 ARM Cortex-M0+ micro-controller
|
||||
bundled with Atmel's AT86RF233, a 2.4GHz IEEE802.15.4 compatible radio. For
|
||||
programming the MCU comes with 32Kb of RAM and 256Kb of flash memory.
|
||||
|
||||
The samr21-xpro is available from various hardware vendors for ~40EUR (as of
|
||||
sep. 2014).
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | ATSAMR21G18A |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0+ |
|
||||
| Vendor | Atmel |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | up to 48MHz |
|
||||
| FPU | no |
|
||||
| Timers | 6 (1x 16-bit, 2x 24-bit, 3x 32-bit) |
|
||||
| ADCs | 1x 12-bit (8 channels) |
|
||||
| UARTs | max 5 (shared with SPI and I2C) |
|
||||
| SPIs | max 5 (see UART) |
|
||||
| I2Cs | max 5 (see UART) |
|
||||
| Vcc | 1.8V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.atmel.com/Images/Atmel-42223-SAM-R21_Datasheet.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.atmel.com/Images/Atmel-42243-SAMR21-Xplained-Pro_User-Guide.pdf)|
|
||||
|
||||
### User Interface
|
||||
|
||||
1 User button and 1 LED:
|
||||
|
||||
| Device | PIN |
|
||||
|:------ |:--- |
|
||||
| LED0 | PA19 |
|
||||
| SW0 (button) | PA28 |
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
### Radio
|
||||
|
||||
The SAMR21 SoC includes an on-chip AT86RF233 radio. It is internally
|
||||
connected via SPI and some GPIO pins and behaves in exact the same way as
|
||||
externally connected SPI devices.
|
||||
|
||||
| Sensor | AT86RF233 |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | 2.4GHz IEEE802.15.4 radio |
|
||||
| Vendor | Atmel |
|
||||
| Datasheet | [Datasheet](http://www.atmel.com/images/atmel-8351-mcu_wireless-at86rf233_datasheet.pdf) |
|
||||
| Connected to | SPI_0 |
|
||||
| Pin Config: | |
|
||||
| Device | SERCOM4 |
|
||||
| MOSI | PB30 (OUT, SPI mosi) |
|
||||
| MISO | PC19 (IN, SPI miso) |
|
||||
| SCLK | PC18 (OUT, SPI sclk) |
|
||||
| CS | PB31 (OUT, GPIO output) |
|
||||
| IRQ | PB00 (IN, GPIO external interrupt) |
|
||||
| RSTN | PB15 (OUT, GPIO output) |
|
||||
| SLP_TR | PA20 (OUT, GPIO output) |
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
Please refer to [this tracker](https://github.com/RIOT-OS/RIOT/issues/1646)
|
||||
to see which projects are work in progress and who is the contact person for
|
||||
this.
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | samd21 | partly | Energy saving modes not fully utilized|
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes | |
|
||||
| | UART | yes | two UARTs by now|
|
||||
| | I2C | yes | |
|
||||
| | SPI | yes | |
|
||||
| | ADC | yes | PA04 & PA05 disabled by default due to EDBG's use of them for UART, can be enabled from `periph_conf.h`|
|
||||
| | USB | no | |
|
||||
| | RTT | yes | |
|
||||
| | RTC | yes | |
|
||||
| | RNG | no | no HW module |
|
||||
| | Timer | yes | |
|
||||
| Radio Chip | AT86RF233 | yes | using at86rf231 driver (this will be renamed to at86rf2xx) |
|
||||
|
||||
|
||||
|
||||
## Flashing the device
|
||||
|
||||
Connect the device to your Micro-USB cable using the port labeled as *EDBG*.
|
||||
|
||||
The standard method for flashing RIOT to the samr21-xpro is using OpenOCD.
|
||||
For this to work properly, **you have to make sure to use a very recent version
|
||||
of OpenOCD**. The v0.8.0 release will _not_ work. If this is still the current
|
||||
release you'll have to build OpenOCD from source.
|
||||
|
||||
Refer to https://github.com/RIOT-OS/RIOT/wiki/OpenOCD for building OpenOCD
|
||||
and make sure "cmsis-dap" and "hidapi-libusb" are enabled.
|
||||
|
||||
On Linux you will have to add a **udev** rule for hidraw, like
|
||||
```
|
||||
bash
|
||||
echo 'KERNEL=="hidraw*", SUBSYSTEM=="hidraw", MODE="0664", GROUP="plugdev"' \
|
||||
| sudo tee -a /etc/udev/rules.d/99-usb.rules
|
||||
sudo service udev restart
|
||||
```
|
||||
|
||||
### Arch Linux
|
||||
With yaourt:
|
||||
```
|
||||
yaourt -S hidapi-git
|
||||
yaourt -S openocd-git
|
||||
# edit PKGBUILD, make sure "hidapi-libusb" is in "_features"
|
||||
```
|
||||
|
||||
The **udev** rules for Arch differ a little from the example given above:
|
||||
```
|
||||
bash
|
||||
echo 'KERNEL=="hidraw*", SUBSYSTEM=="hidraw", MODE="0664", GROUP="uucp"' \
|
||||
| sudo tee -a /etc/udev/rules.d/99-usb.rules
|
||||
sudo udevadm control --reload
|
||||
```
|
||||
|
||||
### Ubuntu
|
||||
See http://watr.li/samr21-dev-setup-ubuntu.html
|
||||
|
||||
|
||||
## Connecting multiple boards
|
||||
|
||||
If you have multiple boards connected to the same computer and want to flash,
|
||||
this is what you can do:
|
||||
|
||||
First, run `make list-ttys`. This will show you a list of currently connected
|
||||
boards, their serial numbers and the names of their TTYs:
|
||||
|
||||
Atmel Corp. EDBG CMSIS-DAP serial: 'ATML2127031800002124', tty(s):
|
||||
ttyACM0
|
||||
Atmel Corp. EDBG CMSIS-DAP serial: 'ATML2127031800002145', tty(s):
|
||||
ttyACM1
|
||||
|
||||
knowing your serial number, you can flash, open a terminal or debug a
|
||||
specific board like this:
|
||||
|
||||
BOARD=samr21-xpro SERIAL="ATML2127031800002124" make flash
|
||||
BOARD=samr21-xpro SERIAL="ATML2127031800002124" make term
|
||||
BOARD=samr21-xpro SERIAL="ATML2127031800002124" make debug
|
||||
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the samr21-xpro board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
|
||||
|
||||
## Known Issues / Problems
|
||||
|
||||
### I2C
|
||||
When connecting an I2C device and a logic analyzer to an I2C port at the same
|
||||
time, the internal pull-up resistors are not sufficient for stable bus
|
||||
operation. You probably have to connect external pull-ups to both bus lines. 10K
|
||||
is a good value to start with.
|
||||
|
||||
### Stack sizes
|
||||
The default stack sizes have not been tuned properly yet. If in doubt why
|
||||
your application crashes try increasing the default stack sizes and use `ps` to
|
||||
find out how much stack is being used.
|
||||
Tracked in https://github.com/RIOT-OS/RIOT/issues/2228
|
||||
|
||||
### User Button
|
||||
When using the SW0 user button as interrupt source it appears that this is
|
||||
triggered when just tipping on the button and not really pressing it.
|
||||
|
||||
### Not flashable by OpenOCD anymore
|
||||
It can happen that OpenOCD is not able to program the board, because of wrong
|
||||
clock configuration or low power modes. In this case you can use
|
||||
[this little tool](https://github.com/ataradov/edbg) to erase the flash. Just follow the
|
||||
instructions to build it and run `./edbg -e` to erase the flash. Then press the
|
||||
reset button and you're able to program via OpenOCD again.
|
||||
|
||||
### Flashing might not work in Virtual Box with Mac OS X as host
|
||||
It might happen that flashing through OpenOCD works once inside Virtual Box.
|
||||
But when you try to flash again, you could get a CMSIS-DAP related error. It
|
||||
seems to only happen with USB 3.0 ports. You can take a look at
|
||||
[Vagrant](http://en.wikipedia.org/wiki/Vagrant_%28software%29) and use a virtual
|
||||
Linux to run the virtual RIOT, and flash from OS X.
|
||||
*/
|
||||
95
boards/seeeduino_arch-pro/doc.txt
Normal file
95
boards/seeeduino_arch-pro/doc.txt
Normal file
@ -0,0 +1,95 @@
|
||||
/**
|
||||
@defgroup boards_seeduino_arch-pro Seeeduino Arch Pro development kit
|
||||
@ingroup boards
|
||||
@brief Support for the Seeeduino Arch Pro board
|
||||
|
||||
## Overview
|
||||
The Seeeduino Arch Pro is an 32-bit ARM Cortex M3 microprocessor development
|
||||
board, featuring an Arduino-compatible shield interface and a RJ-45 network
|
||||
interface.
|
||||
|
||||
## Hardware
|
||||

|
||||
|
||||
### MCU
|
||||
| MCU | LPC1768 |
|
||||
|-----------------|------------------------------------------|
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | NXP |
|
||||
| RAM | 64KB |
|
||||
| Flash | 512KB |
|
||||
| EEPROM | no |
|
||||
| Frequency | up to 100 MHz |
|
||||
| FPU | no |
|
||||
| DMA | 8 channels |
|
||||
| Timers | 4 x 32-bit |
|
||||
| ADCs | 12-bit ADC |
|
||||
| UARTs | 3x USART |
|
||||
| SPIs | 2x USART |
|
||||
| I2Cs | 2x |
|
||||
| Vcc | 2.4V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.nxp.com/documents/data_sheet/LPC1768_66_65_64.pdf)|
|
||||
| Manual | [Manual](http://www.nxp.com/documents/user_manual/UM10360.pdf)|
|
||||
| Board Manual | [Board Manual](http://www.seeedstudio.com/wiki/Arch_Pro)|
|
||||
| Board Schematic | [Board Schematic](http://www.seeedstudio.com/wiki/File:Arch_Pro_V1.0_Schematic.pdf) |
|
||||
|
||||
### Pinout
|
||||
|
||||
### User interface
|
||||
| Peripheral | Mapped to | Hardware | Pin | Comments |
|
||||
|------------|-----------|----------|-------|------------|
|
||||
| LED | LED0 | LED1 | P1_18 | Green LED |
|
||||
| | LED1 | LED2 | P1_20 | Red LED |
|
||||
| | LED2 | LED3 | P1_21 | Blue LED |
|
||||
| | LED3 | LED4 | P1_23 | Yellow LED |
|
||||
|
||||
## Board configuration
|
||||
|
||||
### Virtual serial port
|
||||
The first UART device is mapped to stdout.
|
||||
|
||||
Note: the board controller always configures the virtual serial port at
|
||||
115200 baud with 8 bits, no parity and one stop bit. This also means that it
|
||||
expects data from the MCU with the same settings.
|
||||
|
||||
Note: to use the virtual serial port, ensure you have the latest board
|
||||
controller firmware installed.
|
||||
|
||||
## Flashing the device
|
||||
To flash, the [OpenOCD Software](http://openocd.org/) is required.
|
||||
|
||||
Flashing is supported by RIOT-OS by the command below:
|
||||
|
||||
```
|
||||
make flash
|
||||
```
|
||||
|
||||
To run the GDB debugger, use the command:
|
||||
|
||||
```
|
||||
make debug
|
||||
```
|
||||
|
||||
Or, to connect with your own debugger:
|
||||
|
||||
```
|
||||
make debug-server
|
||||
```
|
||||
|
||||
## Image checksum
|
||||
LPC ARM Cortext MCUs need a [flash image checksum](https://community.nxp.com/thread/389046). When running `make flash`,
|
||||
this checksum is automatically generated and inserted into the firmware image
|
||||
right before flashing.
|
||||
|
||||
It depends on the [lpc_checksum](https://pypi.python.org/pypi/lpc_checksum)
|
||||
command-line utility, which can be installed using using `pip install
|
||||
lpc_checksum` or `pip3 install lpc_checksum`. After installing this utility, it
|
||||
should be available on your command-line.
|
||||
|
||||
## Supported toolchains
|
||||
For using the Seeeduino Arch Pro development kit we strongly recommend the
|
||||
usage of the [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded) toolchain.
|
||||
|
||||
## License information
|
||||
* Image: taken from Seeeduino website.
|
||||
*/
|
||||
5
boards/sltb001a/doc.txt
Normal file
5
boards/sltb001a/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_sltb001a Silicon Labs SLTB001A starter kit
|
||||
@ingroup boards
|
||||
@brief Support for the Silicon Labs SLTB001A starter kit
|
||||
*/
|
||||
5
boards/slwstk6220a/doc.txt
Normal file
5
boards/slwstk6220a/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_slwstk6220a Silicon Labs WSTK6220 Eval Kit
|
||||
@ingroup boards
|
||||
@brief Support for the Silicon Labs WSTK6220 evaluation kit
|
||||
*/
|
||||
118
boards/sodaq-autonomo/doc.txt
Normal file
118
boards/sodaq-autonomo/doc.txt
Normal file
@ -0,0 +1,118 @@
|
||||
/**
|
||||
@defgroup boards_sodaq-autonomo SODAQ Autonomo
|
||||
@ingroup boards
|
||||
@brief Support for the SODAQ Autonomo board.
|
||||
|
||||
## Overview
|
||||
|
||||
The `SODAQ Autonomo` is a board by SODAQ featuring a ATSAMD21J18A. The SAMD21
|
||||
is a ARM Cortex-M0+ micro-controller. It has 256Kb of flash memory and 32Kb of
|
||||
RAM.
|
||||
|
||||
The Autonomo is available from the SODAQ [shop](http://shop.sodaq.com/).
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | ATSAMD21J18A |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M0+ |
|
||||
| Vendor | Atmel |
|
||||
| RAM | 32Kb |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | up to 48MHz |
|
||||
| FPU | no |
|
||||
| Timers | 6 (1x 16-bit, 2x 24-bit, 3x 32-bit) |
|
||||
| ADCs | 1x 12-bit (8 channels) |
|
||||
| UARTs | max 6 (SERCOMs shared with SPI and I2C) |
|
||||
| SPIs | max 6 (see UART) |
|
||||
| I2Cs | max 6 (see UART) |
|
||||
| Vcc | 1.8V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.atmel.com/Images/Atmel-42181-SAM-D21_Datasheet.pdf) |
|
||||
|
||||
### User Interface
|
||||
|
||||
1 LED:
|
||||
|
||||
| Device | PIN |
|
||||
|:------ |:--- |
|
||||
| LED0 | PA19 |
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
Please refer to [this tracker](https://github.com/RIOT-OS/RIOT/issues/1646)
|
||||
to see which projects are work in progress and who is the contact person for
|
||||
this. Notice that the initial support for the Autonomo was based on
|
||||
samr21-xpro. At some point we will add a separate issue to track changes for
|
||||
this board.
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | samd21 | partly | Energy saving modes not fully utilized|
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes | |
|
||||
| | UART | yes | two UARTs by now|
|
||||
| | I2C | yes | |
|
||||
| | SPI | yes | |
|
||||
| | ADC | yes | PA04 & PA05 disabled by default due to EDBG's use of them for UART, can be enabled from `periph_conf.h`|
|
||||
| | USB | no | |
|
||||
| | RTT | yes | |
|
||||
| | RTC | yes | |
|
||||
| | RNG | no | no HW module |
|
||||
| | Timer | yes | |
|
||||
|
||||
|
||||
|
||||
## Features of the board
|
||||
|
||||
Besides the SAMD21 the board has the following features:
|
||||
|
||||
| Feature | Description |
|
||||
|:------ |:--- |
|
||||
| Compatibility | Arduino M0 compatible |
|
||||
| Size | 58.5 x 33.5 mm |
|
||||
| Operating Voltage | 3.3V |
|
||||
| Digital I/O Pins | 16, with 12 PWM, UART, SPI and TWI (I2C) |
|
||||
| Analog Input Pins | 6, 12-bit ADC channels |
|
||||
| Analog Output Pins | 10-bit DAC |
|
||||
| External Interrupts | Available on all pins except pin 4 |
|
||||
| DC Current per I/O pin | 7 mA |
|
||||
| EEPROM | Up to 16KB by emulation |
|
||||
| Clock Speed | 48 MHz |
|
||||
| Debug | Serial Wire Interface |
|
||||
| Communications | Bee compatible slot for communication modules with software switchable power |
|
||||
| Storage | 16Mbit Dataflash Module and Micro SD card holder |
|
||||
| Power | 5V USB power and/or 3.7V LiPo battery |
|
||||
| Power switch | Software switchable power for connected devices up to 1A |
|
||||
| Charging | Solar charge controller, up to 500mA charge current|
|
||||
| LED's | Yellow charge LED and green LED on pin 13 |
|
||||
|
||||
## Flashing the device
|
||||
|
||||
The Autonomo has a 10 pin header compatible with the Atmel-ICE. The standard
|
||||
method for flashing RIOT to the sodaq-autonomo is using OpenOCD. For this to
|
||||
work properly, **you have to make sure to use a very recent version of
|
||||
OpenOCD**. Arduino-IDE comes with openocd v0.9.0 which is known to work. Also
|
||||
Ubuntu 16.04 has openocd v0.9.0.
|
||||
|
||||
Refer to https://github.com/RIOT-OS/RIOT/wiki/OpenOCD for building OpenOCD
|
||||
and make sure "cmsis-dap" and "hidapi-libusb" are enabled.
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
To build software for the autonomo board we strongly recommend the usage of
|
||||
the [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded) toolchain.
|
||||
|
||||
|
||||
## Known Issues / Problems
|
||||
|
||||
### Stack sizes
|
||||
The default stack sizes have not been tuned properly yet. If in doubt why
|
||||
your application crashes try increasing the default stack sizes and use `ps` to
|
||||
find out how much stack is being used.
|
||||
Tracked in https://github.com/RIOT-OS/RIOT/issues/2228
|
||||
*/
|
||||
@ -1,29 +1,29 @@
|
||||
/**
|
||||
* @defgroup boards_sodaq-explorer SODAQ ExpLoRer
|
||||
* @ingroup boards
|
||||
* @brief Support for the SODAQ ExpLoRer board
|
||||
*
|
||||
* ### General information
|
||||
*
|
||||
* General information about this board can be found on the
|
||||
* [SODAQ support](http://support.sodaq.com/sodaq-one/explorer/) website.
|
||||
*
|
||||
* ### Flash the board
|
||||
*
|
||||
* 1. Put the board in bootloader mode by double tapping the reset button.<br/>
|
||||
* When the board is in bootloader mode, the user led (blue) oscillates
|
||||
* smoothly.
|
||||
*
|
||||
*
|
||||
* 2. Use `BOARD=sodaq-explorer` with the `make` command.<br/>
|
||||
* Example with `hello-world` application:
|
||||
* ```
|
||||
* make BOARD=sodaq-explorer -C examples/hello-world flash
|
||||
* ```
|
||||
*
|
||||
* ### Accessing STDIO via UART
|
||||
*
|
||||
* To access the STDIO of RIOT, a FTDI to USB converter needs to be plugged to
|
||||
* the RX/TX pins on the board.
|
||||
*
|
||||
*/
|
||||
@defgroup boards_sodaq-explorer SODAQ ExpLoRer
|
||||
@ingroup boards
|
||||
@brief Support for the SODAQ ExpLoRer board
|
||||
|
||||
### General information
|
||||
|
||||
General information about this board can be found on the
|
||||
[SODAQ support](http://support.sodaq.com/sodaq-one/explorer/) website.
|
||||
|
||||
### Flash the board
|
||||
|
||||
1. Put the board in bootloader mode by double tapping the reset button.<br/>
|
||||
When the board is in bootloader mode, the user led (blue) oscillates
|
||||
smoothly.
|
||||
|
||||
|
||||
2. Use `BOARD=sodaq-explorer` with the `make` command.<br/>
|
||||
Example with `hello-world` application:
|
||||
```
|
||||
make BOARD=sodaq-explorer -C examples/hello-world flash
|
||||
```
|
||||
|
||||
### Accessing STDIO via UART
|
||||
|
||||
To access the STDIO of RIOT, a FTDI to USB converter needs to be plugged to
|
||||
the RX/TX pins on the board.
|
||||
|
||||
*/
|
||||
|
||||
119
boards/spark-core/doc.txt
Normal file
119
boards/spark-core/doc.txt
Normal file
@ -0,0 +1,119 @@
|
||||
/**
|
||||
@defgroup boards_spark-core Spark-Core
|
||||
@ingroup boards
|
||||
@brief Support for the spark-core board
|
||||
|
||||
## Overview
|
||||
|
||||
Spark's hardware dev kit, the Spark Core, provides everything you need to
|
||||
build a connected product. We combine a powerful ARM Cortex M3 micro-controller
|
||||
with a Wi-Fi module to get you started quickly. The design is open source, so
|
||||
when you're ready to integrate the Core into your product, you can.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
Link to [product website](http://docs.spark.io/hardware/).
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F103CB |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M3 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 20Kb |
|
||||
| Flash | 128Kb |
|
||||
| Frequency | up to 72MHz (using the on-board 8MHz Oszillator of the ST- Link) |
|
||||
| FPU | yes |
|
||||
| Timers | 10 (9x 16-bit, 1x 32-bit [TIM2]) |
|
||||
| ADCs | 4x 12-bit |
|
||||
| UARTs | 5 |
|
||||
| SPIs | 3 |
|
||||
| I2Cs | 2 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](https://github.com/spark/core/blob/master/Datasheets/ST_STM32F103CB.pdf) |
|
||||
| Reference Manual | [Reference Manual](xxx) |
|
||||
| Programming Manual | [Programming Manual](xxx) |
|
||||
| Board Manual | [Board Manual](http://docs.spark.io/hardware/)|
|
||||
|
||||
# Hardware connection
|
||||
|
||||
First of all make sure the your spark core device is detected and can be
|
||||
accessed properly. In Linux you might have to adept your udev rules accordingly:
|
||||
|
||||
```
|
||||
$ cat 50-openmoko.rules
|
||||
#Bus 001 Device 022: ID 1d50:607f OpenMoko, Inc.
|
||||
|
||||
SUBSYSTEMS=="usb", ATTRS{idVendor}=="1d50", ATTRS{idProduct}=="607f", \
|
||||
MODE:="0666", \
|
||||
SYMLINK+="openmoko_%n"
|
||||
|
||||
# If you share your linux system with other users, or just don't like the
|
||||
# idea of write permission for everybody, you can replace MODE:="0666" with
|
||||
# OWNER:="yourusername" to create the device owned by you, or with
|
||||
# GROUP:="somegroupname" and mange access using standard unix groups.
|
||||
|
||||
sudo cp 50-openmoko.rules /etc/udev/rules.d/
|
||||
sudo udevadm control --reload-rules
|
||||
sudo udevadm trigger
|
||||
```
|
||||
|
||||
now replug the usb cable and flash.
|
||||
|
||||
# Flashing
|
||||
|
||||
To flash RIOT to the spark core you need to install `dfu-util` (tested with
|
||||
0.7 and 0.8).
|
||||
|
||||
Power the device and press the the `mode` button until the LED flashes
|
||||
yellow/orange: now the device is ready to get flashed.
|
||||
|
||||
# Firmware upgrade
|
||||
|
||||
To run RIOT it is required that you run the newest spark bootloader on your
|
||||
core:
|
||||
from https://community.spark.io/t/replace-core-firmware-with-riot-os/7007/7
|
||||
|
||||
```
|
||||
Here is the core-firmware branch for this:
|
||||
https://github.com/spark/core-firmware/tree/bootloader-patch-update1
|
||||
However care should be taken not to disturb the patch update process by
|
||||
accidentally removing usb power or through reset.
|
||||
Following is the procedure to update the bootloader-patch
|
||||
1)cd core-firmware
|
||||
2)git pull
|
||||
3)git checkout bootloader-patch-update
|
||||
4)cd build [No need to run make]
|
||||
5)Enter usb dfu/bootloader mode => Yellow flashes
|
||||
6) dfu-util -d 1d50:607f -a 0 -s 0x08005000:leave -D core-firmware.bin
|
||||
7)Upon execution, the bootloader should be updated within a second or two and
|
||||
normal core-firmware should start executing.
|
||||
8)Congrats! your core is loaded with latest bootloader without the hassle of
|
||||
going through ST-Link JTAG programming
|
||||
```
|
||||
|
||||
Build and flash
|
||||
===============
|
||||
|
||||
1. clone RIOT-OS
|
||||
2. cd to e.g. `examples/hello_world`
|
||||
3. enter `BOARD=spark-core make clean all flash`
|
||||
|
||||
Use the UART
|
||||
============
|
||||
|
||||
1. RIOT is using the UART PINs on the board, they are labeled as `RT` and
|
||||
`TX`.
|
||||
2. Connect your TTY to them and `BOARD=spark-core make term`.
|
||||
3. In a different terminal enter `BOARD=spark-core make reset`
|
||||
|
||||
Pin mapping in RIOT
|
||||
===================
|
||||
|
||||
Please refer to [this document](http://docs.spark.io/assets/images/spark-
|
||||
pinout.png) for RIOTs static pin mapping chosen for this board. This mapping is
|
||||
completely arbitrary, it can be adjusted in `boards/spark-
|
||||
core/include/periph_conf.h`
|
||||
*/
|
||||
5
boards/stm32f0discovery/doc.txt
Normal file
5
boards/stm32f0discovery/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_stm32f0discovery STM32F0Discovery
|
||||
@ingroup boards
|
||||
@brief Support for the STM32F0Discovery board
|
||||
*/
|
||||
160
boards/stm32f3discovery/doc.txt
Normal file
160
boards/stm32f3discovery/doc.txt
Normal file
@ -0,0 +1,160 @@
|
||||
/**
|
||||
@defgroup boards_stm32f3discovery STM32F3Discovery
|
||||
@ingroup boards
|
||||
@brief Support for the STM32F3Discovery board
|
||||
|
||||
## Overview
|
||||
|
||||
The STM32F3-discovery is cheap evaluation board designed by ST for pushing
|
||||
the STM32F3 microcontoller to a broad audience. It features an STM32F303VC
|
||||
microcontroller with 48Kb of RAM and 256Kb flash memory running with up to
|
||||
72MHz. Addionially it provides USB host capabilities, 8 LEDs and sensors for a
|
||||
9-degree of freedom initial measurement unit (3-axis accelerometer, 3-axis gyro
|
||||
and 3-axis magnetometer).
|
||||
|
||||
The board does however not provide any radio capabilities, radio devices have
|
||||
to be connected externally via I2C, SPI, UART or similar.
|
||||
|
||||
See [this page](https://github.com/RIOT-OS/RIOT/wiki/Getting-started-with-STM32F%5B0%7C3%7C4%5Ddiscovery-boards)
|
||||
for a quick getting started guide.
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F303VC |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| RAM | 48Kb (40Kb RAM + 8Kb CCM RAM) |
|
||||
| Flash | 256Kb |
|
||||
| Frequency | up to 72MHz (using the on-board 8MHz Oszillator of the ST-Link) |
|
||||
| FPU | yes |
|
||||
| Timers | 10 (9x 16-bit, 1x 32-bit [TIM2]) |
|
||||
| ADCs | 4x 12-bit |
|
||||
| UARTs | 5 |
|
||||
| SPIs | 3 |
|
||||
| I2Cs | 2 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/web/en/resource/technical/document/datasheet/DM00058181.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00043574.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/programming_manual/DM00046982.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00063382.pdf)|
|
||||
|
||||
### RIOT static pin mapping
|
||||
|
||||
please refer to [this](https://docs.google.com/spreadsheets/d/1gnxsux5WpFrn-33Ivb9nGgTBqooqgDYxRkhZms-cvsc/edit?usp=sharing)
|
||||
* document for the pin mapping as
|
||||
implemenented in `boards/stm32f3discovery/include/periph_conf.h`
|
||||
|
||||
### User Interface
|
||||
|
||||
2 Buttons:
|
||||
|
||||
| NAME | USER | RESET |
|
||||
|:----- |:----- |:--------- |
|
||||
| Pin | PA0 (IN) | NRST |
|
||||
|
||||
8 LEDs:
|
||||
|
||||
| NAME | LD3 | LD4 | LD5 | LD6 | LD7 | LD8 | LD9 | LD10 |
|
||||
| ----- | ----- | ----- | ----- | ----- | ----- | ----- | ----- | ----- |
|
||||
| Color | red | blue | orange| green | green | orange| blue | red |
|
||||
| Pin | PE9 | PE8 | PE10 | PE15 | PE11 | PE14 | PE12 | PE13 |
|
||||
|
||||
|
||||
|
||||
### E-Compass / Accelerometer
|
||||
|
||||
The board has an on-board MEMS-chip that is an integrated accelerometer and
|
||||
e-compass.
|
||||
|
||||
| Sensor | LSM303DLHC |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | Accelerometer and magnetometer |
|
||||
| Vendor | ST Microelectronics |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00027543.pdf)|
|
||||
| Errata Sheet | [Errata Sheet](http://www.st.com/st-web-ui/static/active/en/fragment/legal/statements/disclaimer/disclaimer_errata.pdf)|
|
||||
| Connected to | I2C_0 |
|
||||
| Pin Config: | |
|
||||
| Device | I2C1 |
|
||||
| SCL | PB6 (OUT, I2C1_SCL) |
|
||||
| SDA | PB7 (OUT, I2C1_SDA) |
|
||||
| DRDY | PE2 (IN) |
|
||||
| INT1 | PE4 (IN) |
|
||||
| INT2 | PE5 (IN) |
|
||||
|
||||
|
||||
|
||||
### Gyroscope
|
||||
|
||||
An 3-axis gyroscope is soldered on the board.
|
||||
|
||||
| Sensor | L3GD20 |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | Gyroscope |
|
||||
| Vendor | ST Microelectronics |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00036465.pdf) |
|
||||
| Errata Sheet | [Errata Sheet](http://www.st.com/st-web-ui/static/active/en/fragment/legal/statements/disclaimer/disclaimer_errata.pdf)|
|
||||
| Connected to | SPI_0 |
|
||||
| Pin Config: | |
|
||||
| Device | SPI1 |
|
||||
| SCK | PA5 (OUT, SPI1_SCK) |
|
||||
| MISO | PA6 (IN, SPI1_MISO) |
|
||||
| MOSI | PA7 (OUT, SPI1_MOSI) |
|
||||
| CS | PE3 (OUT) |
|
||||
| INT1 | PE0 (IN) |
|
||||
| INT2/DRDY | PE1 (IN) |
|
||||
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:------------- |:------------- |:------------- |:------------- |
|
||||
| MCU | STM23F303VC | partly | Energy saving modes not fully utilized |
|
||||
| Low-level driver | GPIO | yes | |
|
||||
| | PWM | yes | |
|
||||
| | UART | full | |
|
||||
| | I2C | no | in progress |
|
||||
| | SPI | no | in progress |
|
||||
| | USB | no | |
|
||||
| | Timer | full | |
|
||||
| | Inpute Capture| no | |
|
||||
| Accelerometer | LSM303DLHC | no | planned |
|
||||
| Magnetometer | LSM303DLHC | no | planned |
|
||||
| Gyroscope | L3GD20 | no | planned |
|
||||
|
||||
|
||||
## Flashing the device
|
||||
|
||||
|
||||
The STM32F3discovery board includes an on-board ST-LINK V2 programmer. The
|
||||
easiest way to program the board is to use OpenOCD. Once you have installed
|
||||
OpenOCD (look [here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD) for
|
||||
installation instructions), you can flash the board simply by typing
|
||||
|
||||
```
|
||||
make flash
|
||||
```
|
||||
and debug via GDB by simply typing
|
||||
```
|
||||
make debug
|
||||
```
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the STM32F3discovery board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
|
||||
|
||||
## Using UART
|
||||
|
||||
1. connect your usb tty to: RX=PA10 TX=PA9 and GND=GND
|
||||
- **PA10** is connected with **TX** on the UART converter
|
||||
- **PA9** is connected with **RX** on the UART converter
|
||||
2. done
|
||||
*/
|
||||
181
boards/stm32f4discovery/doc.txt
Normal file
181
boards/stm32f4discovery/doc.txt
Normal file
@ -0,0 +1,181 @@
|
||||
/**
|
||||
@defgroup boards_stm32f4discovery STM32F4Discovery
|
||||
@ingroup boards
|
||||
@brief Support for the STM32F4Discovery board
|
||||
|
||||
## Overview
|
||||
|
||||
See [this page](https://github.com/RIOT-OS/RIOT/wiki/Getting-started-with-STM32F%5B0%7C3%7C4%5Ddiscovery-boards)
|
||||
for a quick getting started guide.
|
||||
|
||||
## Hardware
|
||||
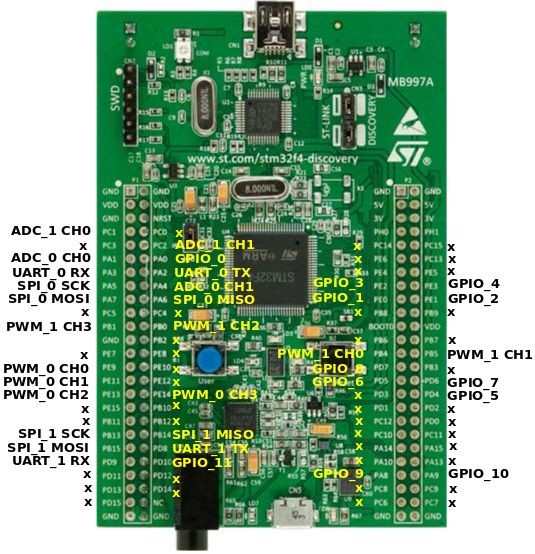
|
||||
|
||||
### MCU
|
||||
| MCU | STM32F407VGT6 |
|
||||
|:------------- |:--------------------- |
|
||||
| Family | ARM Cortex-M4 |
|
||||
| Vendor | ST Microelectronics |
|
||||
| Package | LQFP100 |
|
||||
| RAM | 192Kb (128Kb RAM + 64Kb CCMRAM) |
|
||||
| Flash | 1024Kb |
|
||||
| Frequency | up to 168MHz |
|
||||
| FPU | yes |
|
||||
| Timers | 14 (12x 16bit, 2x 32bit [TIM2 + TIM5]) |
|
||||
| ADCs | 3x 16 channel 6 to 12-bit |
|
||||
| UARTs | 6 |
|
||||
| SPIs | 3 |
|
||||
| I2Cs | 3 |
|
||||
| Vcc | 2.0V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://www.st.com/web/en/resource/technical/document/datasheet/DM00037051.pdf) |
|
||||
| Reference Manual | [Reference Manual](http://www.st.com/web/en/resource/technical/document/reference_manual/DM00031020.pdf) |
|
||||
| Programming Manual | [Programming Manual](http://www.st.com/web/en/resource/technical/document/programming_manual/DM00023388.pdf) |
|
||||
| Board Manual | [Board Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/user_manual/DM00039084.pdf)|
|
||||
|
||||
### RIOT pin mapping
|
||||
|
||||
Please refer to [this document](https://docs.google.com/spreadsheets/d/11iqdux3K1-7FPZChufNgpChwENkgCiLrnKJPoCcJxdg/edit?usp=sharing)
|
||||
for the RIOTs pin
|
||||
mapping for the stm32f4discovery board. The pin mapping is chosen completely
|
||||
arbitrary and can be altered by editing the
|
||||
`boards/stm32f4discovery/include/periph_conf.h` header file.
|
||||
|
||||
### User Interface
|
||||
|
||||
2 Buttons:
|
||||
|
||||
| NAME | USER | RESET |
|
||||
|:----- |:----- |:--------- |
|
||||
| Pin | PA0 (IN) | NRST |
|
||||
|
||||
6 User controllable LEDs:
|
||||
|
||||
| NAME | LD3 | LD4 | LD5 | LD6 | LD7 | LD8 |
|
||||
| ----- | ----- | ----- | ----- | ----- | ----- | ------ |
|
||||
| Color | orange| green | red | blue | green | red |
|
||||
| Pin | PD13 | PD12 | PD14 | PD15 | PA9 | PD5 |
|
||||
|
||||
LEDs LD7 and LD8 are used by the USB connector for over-current (LD8) and
|
||||
data (LD7) indication.
|
||||
|
||||
|
||||
|
||||
### Accelerometer
|
||||
|
||||
The STM32F4discovery board contains a 3-axis MEMS accelerometer that can
|
||||
sample with up to 1.6kHz.
|
||||
|
||||
| Sensor | LIS3DSH |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | Accelerometer |
|
||||
| Vendor | ST Microelectronics |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00040962.pdf)|
|
||||
| Connected to | SPI_0 |
|
||||
| Pin Config: | |
|
||||
| Device | SPI1 |
|
||||
| SCK | PA5 (OUT, SPI1_SCK) |
|
||||
| MISO | PA6 (IN, SPI1_MISO) |
|
||||
| MOSI | PA7 (OUT, SPI1_MOSI) |
|
||||
| INT1 | PE0 (IN) |
|
||||
| INT2 | PE1 (IN) |
|
||||
| CS | PE3 (OUT) |
|
||||
|
||||
### Digital Microphone
|
||||
|
||||
The STM32F4discovery board contains a on-board MEMS audio sensor.
|
||||
|
||||
| Sensor | MP45DT02 |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | Audio sensor |
|
||||
| Vendor | ST Microelectronics |
|
||||
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00025467.pdf)|
|
||||
| Connected to | n/a |
|
||||
| Pin Config: | |
|
||||
| Device | I2S2 |
|
||||
| CLK | PB10 |
|
||||
| DOUT | PC3 |
|
||||
|
||||
|
||||
### Audio DAC with integrated class D speaker driver
|
||||
|
||||
The board contains an digital analog converter (DAC) with integrated class D
|
||||
speaker driver.
|
||||
|
||||
| Device | CS43L22 |
|
||||
|:------------- |:--------------------- |
|
||||
| Type | DAC |
|
||||
| Vendor | Cirrus Logic |
|
||||
| Datasheet | [Datasheet](http://www.cirrus.com/en/pubs/proDatasheet/CS43L22_F2.pdf) |
|
||||
| Connected to | DAC + I2C + I2S |
|
||||
| Pin Config: | |
|
||||
| Device | DAC1 + I2C1 + I2S3 |
|
||||
| AIN1 | PA4 (DAC1_OUT) |
|
||||
| SCL | PB6 (I2C1_SCL) |
|
||||
| SDA | PB9 (I2C1_SDA) |
|
||||
| MCLK | PC7 (I2S3_MCK) |
|
||||
| SCLK | PC10 (I2S3_CK) |
|
||||
| SDIN | PC12 (I2S3_SD) |
|
||||
| RESET | PD4 (OUT) |
|
||||
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the STM32F4discovery board we strongly recommend the usage of the
|
||||
[GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded)
|
||||
toolchain.
|
||||
|
||||
# Alternative way to flash
|
||||
|
||||
## Using openocd to flash the RIOT binary to the board
|
||||
|
||||
1. Compile your code to have a .hex file
|
||||
2. Connect the board with the mini usb cable, on the debugger side to your PC
|
||||
3. run openocd with `$ sudo /usr/local/bin/openocd -f interface/stlink-v2.cfg
|
||||
-f target/stm32f4x_stlink.cfg`
|
||||
4. in a new terminal connect: `telnet 127.0.0.1 4444`
|
||||
5. run:
|
||||
```
|
||||
> flash banks
|
||||
#0 : stm32f4x.flash (stm32f2x) at 0x08000000, size 0x00100000, buswidth 0,
|
||||
chipwidth 0
|
||||
|
||||
> halt
|
||||
target state: halted
|
||||
target halted due to debug-request, current mode: Thread
|
||||
xPSR: 0x21000000 pc: 0x0800251a msp: 0x20000c4c
|
||||
|
||||
> flash write_image erase unlock /home/c/git/RIOT-
|
||||
OS/RIOT/examples/ipc_pingpong/bin/stm32f4discovery/ipc_pingpong.hex 0
|
||||
auto erase enabled
|
||||
auto unlock enabled
|
||||
target state: halted
|
||||
target halted due to breakpoint, current mode: Thread
|
||||
xPSR: 0x61000000 pc: 0x20000042 msp: 0x20000c4c
|
||||
wrote 16384 bytes from file /home/c/git/RIOT-
|
||||
OS/RIOT/examples/ipc_pingpong/bin/stm32f4discovery/ipc_pingpong.hex in 1.200528s
|
||||
(13.327 KiB/s)
|
||||
|
||||
> reset
|
||||
```
|
||||
The board is now flashed with your RIOT binary
|
||||
|
||||
## Using UART
|
||||
|
||||
1. connect your usb tty to: RX=PA3 TX=PA2 and GND=GND
|
||||
- **PA3** is connected with **TX** on the UART converter
|
||||
- **PA2** is connected with **RX** on the UART converter
|
||||
2. done
|
||||
|
||||
## Known Issues / Problems
|
||||
|
||||
### I2C
|
||||
When connecting an I2C device and a logic analyzer to an I2C port at the same
|
||||
time, the internal pull-up resistors are not sufficient for stable bus
|
||||
operation. You probably have to connect external pull-ups to both bus lines. 10K
|
||||
is a good value to start with.
|
||||
|
||||
### OS X & make term
|
||||
If you want the terminal to work using `make term` command and get a message
|
||||
about missing tty device install the driver from
|
||||
http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx .
|
||||
*/
|
||||
5
boards/stm32f769i-disco/doc.txt
Normal file
5
boards/stm32f769i-disco/doc.txt
Normal file
@ -0,0 +1,5 @@
|
||||
/**
|
||||
@defgroup boards_stm32f769i-disco STM32F769I-DISCO board
|
||||
@ingroup boards
|
||||
@brief Support for the STM32F769I-DISCO board
|
||||
*/
|
||||
Some files were not shown because too many files have changed in this diff Show More
Loading…
Reference in New Issue
Block a user