mirror of
https://github.com/RIOT-OS/RIOT.git
synced 2024-12-29 04:50:03 +01:00
169 lines
6.9 KiB
Plaintext
169 lines
6.9 KiB
Plaintext
/**
|
|
@defgroup boards_rpi_pico Raspberry Pi Pico
|
|
@ingroup boards
|
|
@brief Support for the RP2040 based Raspberry Pi Pico board
|
|
|
|
## Overview
|
|
|
|
The Raspberry Pi Pico is sold by the Raspberry Pi foundation for about 4 USD. It features the
|
|
RP2040 MCU, a custom dual core ARM Cortex-M0+ MCU with relatively high CPU clock, plenty of RAM and
|
|
some unique peripheral (the Programmable IO).
|
|
|
|
## Hardware
|
|
|
|

|
|
|
|
### MCU
|
|
|
|
The Programmable IO (PIO) peripheral and the SSI/QSPI peripheral that supports execution from
|
|
flash (XIP) are the most distinguishing features of the MCU. The latter is especially important,
|
|
since the RP2040 contains no internal flash.
|
|
|
|
| MCU | RP2040 |
|
|
|:-----------|:------------------------------------------------------------ |
|
|
| Family | (2x) ARM Cortex-M0+ |
|
|
| Vendor | Raspberry Pi |
|
|
| RAM | 264 KiB |
|
|
| Flash | 2 MiB (up to 16 MiB) |
|
|
| Frequency | up to 133 MHz |
|
|
| FPU | no |
|
|
| PIOs | 8 |
|
|
| Timers | 1 x 64-bit |
|
|
| ADCs | 1x 12-bit (4 channels + temperature sensor) |
|
|
| UARTs | 2 |
|
|
| SPIs | 2 |
|
|
| I2Cs | 2 |
|
|
| RTCs | 1 |
|
|
| USBs | 1 (USB 2.0) |
|
|
| Watchdog | 1 |
|
|
| SSI/QSPI | 1 (connected to flash, with XIP support) |
|
|
| Vcc | 1.62V - 3.63V |
|
|
| Datasheet | [Datasheet](https://datasheets.raspberrypi.com/pico/pico-datasheet.pdf) |
|
|
|
|
### User Interface
|
|
|
|
1 button (also used for boot selection) and 1 LED:
|
|
|
|
| Device | PIN |
|
|
|:------ |:---------------- |
|
|
| LED0 | 25 |
|
|
| SW0 | QSPI_SS_N (*) |
|
|
|
|
(*) Since the switch is connected to the chip-select pin of the QSPI interface the flash chip RIOT
|
|
is running from via XIP, the switch is difficult to read out from software. This is currently not
|
|
supported.
|
|
|
|
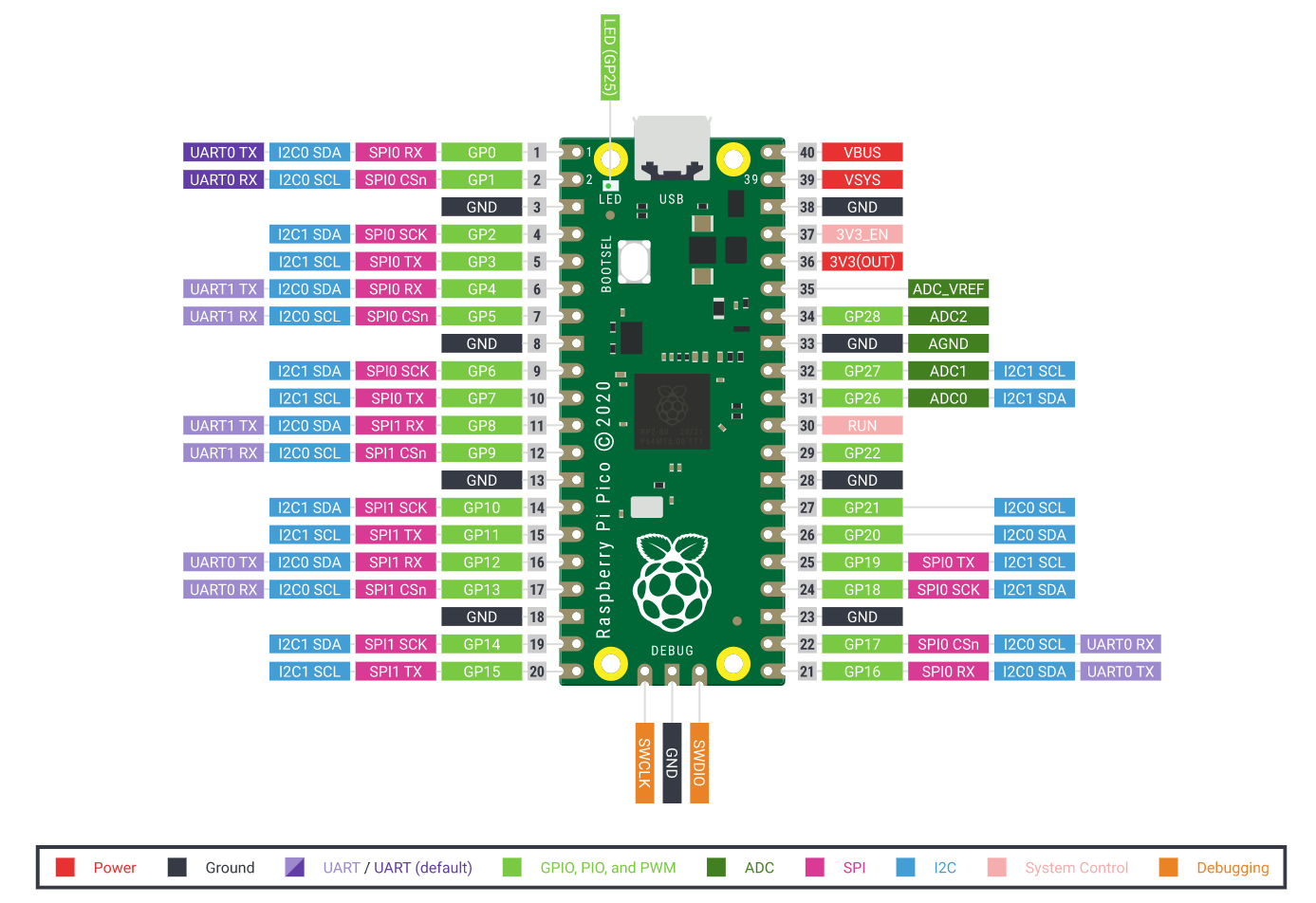
### Pinout
|
|
|
|
|
|
|
|
## Flashing the Board
|
|
|
|
### Flashing the Board Using the Bootloader
|
|
|
|
Connect the device to your Micro-USB cable while the button (labeled `BOOTSEL`
|
|
on the silkscreen of the PCB) is pressed to enter the bootloader. The pico
|
|
will present itself as a storage medium to the system, to which a UF2 file
|
|
can be copied perform the flashing of the device. This can be automated by
|
|
running:
|
|
|
|
```
|
|
make BOARD=rpi-pico flash
|
|
```
|
|
|
|
This is default flashing option using elf2uf2 PROGRAMMER. If the storage is
|
|
not automatically mounted to `/media/<USER_NAME>/RPI-RP2`, you can overwrite
|
|
the path by exporting the shell environment variable `ELF2UF2_MOUNT_PATH`.
|
|
|
|
### Flashing the Board Using OpenOCD
|
|
|
|
Currently (June 2021), only two methods for debugging via OpenOCD are supported:
|
|
|
|
1. Using a bit-banging low-level adapter, e.g. via the GPIOs of a Raspberry Pi 4B
|
|
2. Using a virtual CMSIS-DAP adapter provided by the second CPU core via
|
|
https://github.com/majbthrd/pico-debug
|
|
|
|
Option 2 requires no additional hardware however, you need to
|
|
first "flash" the gimme-cache variant of [pico-debug](https://github.com/majbthrd/pico-debug)
|
|
into RAM using the UF2 bootloader. For this, plug in the USB cable while holding down the BOOTSEL
|
|
button of the Pico and copy the `pico-debug-gimmecache.uf2` from the
|
|
[latest pico-debug release](https://github.com/majbthrd/pico-debug/releases) into the virtual FAT
|
|
formatted drive the bootloader provides. Once this drive is unmounted again, this will result in
|
|
the Raspberry Pi Pico showing up as CMSIS-DAP debugger. Afterwards run:
|
|
|
|
```
|
|
make BOARD=rpi-pico PROGRAMMER=openocd flash
|
|
```
|
|
|
|
@warning The `rpi-pico` virtual debugger is not persistent and needs to be "flashed" into RAM
|
|
again after each cold boot.
|
|
|
|
@note As of July 2021, the latest stable release of OpenOCD does not yet support the RP2040
|
|
MCU. Instead, compile the current `master` branch from the upstream OpenOCD source.
|
|
The OpenOCD fork of the Raspberry Pi foundation is incompatible with OpenOCD
|
|
configuration provided, so please stick with upstream OpenOCD.
|
|
|
|
### Flashing the Board Using J-Link
|
|
|
|
Connect the Board to an Segger J-Link debugger, e.g. the EDU mini debugger is relatively affordable,
|
|
but limited to educational purposes. Afterwards run:
|
|
|
|
```
|
|
make BOARD=rpi-pico PROGRAMMER=jlink flash
|
|
```
|
|
|
|
## Accessing RIOT shell
|
|
|
|
This board's default access to RIOT shell is via UART (UART0 TX - pin 1, UART0 RX - pin 2).
|
|
|
|
The default baud rate is 115 200.
|
|
|
|
The simplest way to connect to the shell is the execution of the command:
|
|
|
|
```
|
|
make BOARD=rpi-pico term
|
|
```
|
|
|
|
@warning Raspberry Pi Pico board is not 5V tolerant. Use voltage divider or logic level shifter when connecting to 5V UART.
|
|
|
|
## On-Chip Debugging
|
|
|
|
There are currently (June 2021) few hardware options for debugging the Raspberry Pi Pico:
|
|
|
|
1. Via J-Link using one of Seggers debuggers
|
|
2. Via OpenOCD using a low-level bit-banging debugger (e.g. a Raspberry Pi 4B with the GPIOs
|
|
connected to the Raspberry Pi Pico via jump wires)
|
|
3. Via a recently updated [Black Magic Probe](https://github.com/blacksphere/blackmagic)
|
|
|
|
In addition, a software-only option is possible using
|
|
[pico-debug](https://github.com/majbthrd/pico-debug). The default linker script reserved 16 KiB of
|
|
RAM for this debugger, hence just "flash" the "gimme-cache" flavor into RAM using the UF2
|
|
bootloader. Once this is done, debugging is as simple as running:
|
|
|
|
```
|
|
make BOARD=rpi-pico debug
|
|
```
|
|
|
|
***Beware:*** The `rpi-pico` virtual debugger is not persistent and needs to be "flashed" into RAM
|
|
again after each cold boot. The initialization code of RIOT now seems to play well with the
|
|
debugger, so it remains persistent on soft reboots. If you face issues with losing connection to
|
|
the debugger on reboot, try `monitor reset init` in GDB to soft-reboot instead.
|
|
|
|
## Known Issues / Problems
|
|
|
|
### Early state Implementation
|
|
|
|
Currently no support for the following peripherals is implemented:
|
|
|
|
- Timers
|
|
- ADC
|
|
- SPI
|
|
- I2C
|
|
- USB
|
|
- PIO
|
|
- RTC
|
|
- Watchdog
|
|
- SMP support (multi CPU support is not implemented in RIOT)
|
|
|
|
*/
|