mirror of
https://github.com/RIOT-OS/RIOT.git
synced 2024-12-29 04:50:03 +01:00
346 lines
16 KiB
Plaintext
346 lines
16 KiB
Plaintext
/**
|
|
@defgroup boards_msbiot MSB-IoT
|
|
@ingroup boards
|
|
@brief Support for the MSB-IoT board
|
|
|
|
# Overview
|
|
|
|
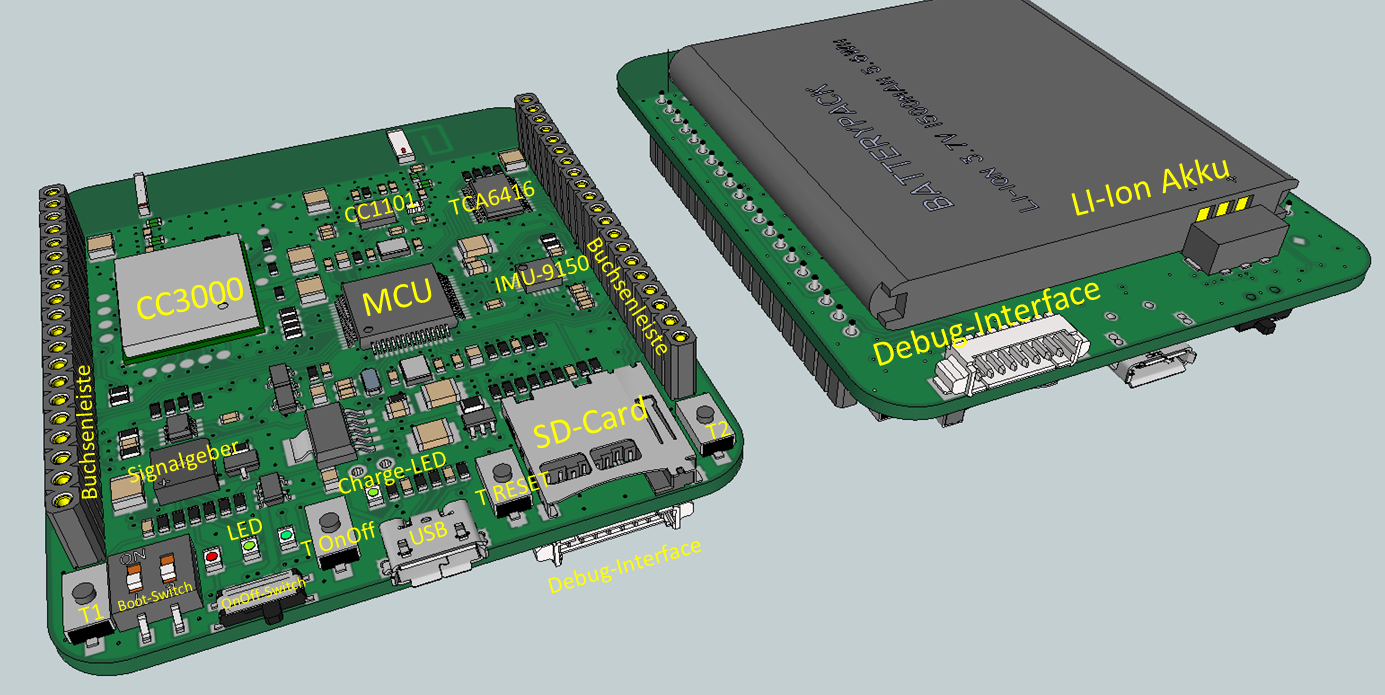
The MSB-IoT was developed at FU Berlin and is based on a STM32F415RG MCU.
|
|
|
|
|
|
|
|
|
|
# Hardware
|
|
|
|
|
|
### MCU
|
|
|
|
The centerpiece of the MSB-IoT is the STM32F415RG MCU. With a maximum
|
|
frequency of 168 MHz it offers high performance for a microcontroller of its
|
|
category. The STM32F415RG comes with a huge set of accessible communication
|
|
interfaces and features that are listed [here](http://www.st.com/web/catalog/mmc/FM141/SC1169/SS1577/LN1035/PF252143?sc=internet/mcu/product/252143.jsp).
|
|
|
|
| MCU | STM32F415RG |
|
|
|:--------------------- |:----------------------------------------- |
|
|
| Family | ARM Cortex-M4 |
|
|
| Vendor | ST Microelectronics |
|
|
| RAM | 192KiB (128KiB RAM + 64KiB CCMRAM) |
|
|
| Flash | 1024KiB |
|
|
| Frequency | up to 168MHz |
|
|
| FPU | yes |
|
|
| Timers | 14 (12x 16bit, 2x 32bit [TIM2 + TIM5]) |
|
|
| ADCs | 3x 12-bit (16 channel) |
|
|
| UARTs | 6 (4 USART, 2 UART) |
|
|
| SPIs | 3 |
|
|
| I2Cs | 3 |
|
|
| Vcc | 1.8V - 3.6V |
|
|
| Datasheet | [Datasheet](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/DM00035129.pdf) |
|
|
| Reference Manual | [Reference Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/reference_manual/DM00031020.pdf) |
|
|
| Programming Manual | [Programming Manual](http://www.st.com/st-web-ui/static/active/en/resource/technical/document/programming_manual/DM00046982.pdf) |
|
|
|
|
|
|
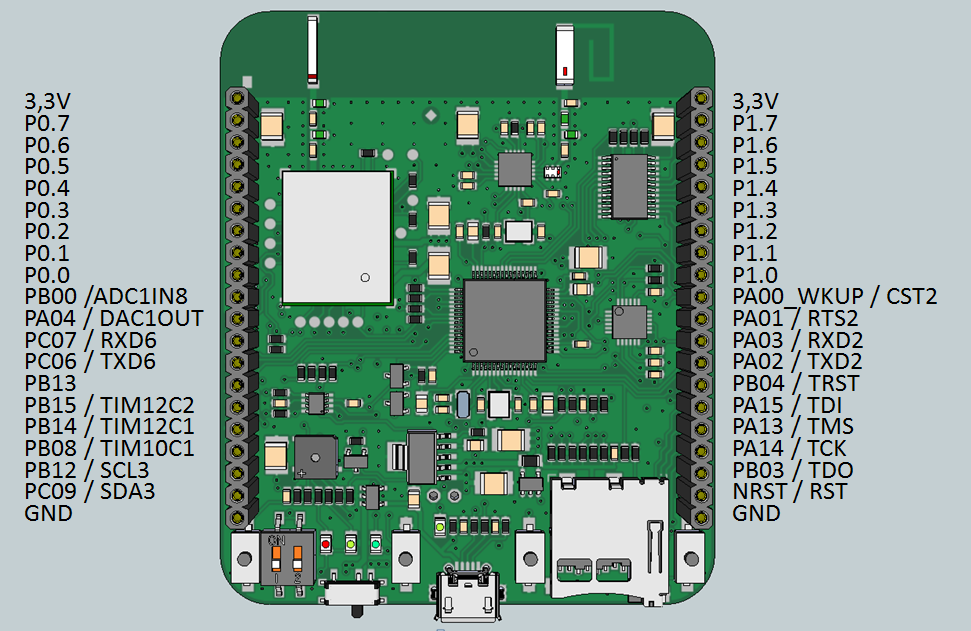
### GPIO Pins
|
|
|
|
The following picture shows the easily accessible pins of the board:
|
|
|
|
|
|
|
|
### User Interface
|
|
|
|
#### 3 Buttons
|
|
|
|
| NAME | User Button T1 | User Button T2 | T RESET |
|
|
|:----- |:----------------- |:----------------- |:--------- |
|
|
| Pin | PB13 | PA0 | NRST |
|
|
|
|
The user buttons are mapped to GPIO_0 (Button T2) and GPIO_8 (Button T1) in
|
|
the board's default configuration file for RIOT. To configure and use the
|
|
buttons, you can use RIOT's @ref drivers_periph_gpio.
|
|
|
|
Pushing the reset button will always reset the board and restart your
|
|
application.
|
|
|
|
#### 3 user controllable LEDs
|
|
|
|
| NAME | LED_RED | LED_YELLOW | LED_GREEN |
|
|
| --------- | ----------------- | ----------------- | ----------------- |
|
|
| Color | red | yellow | green |
|
|
| Pin | PB8 | PB14 | PB15 |
|
|
| Pin Alias | @ref LED0_PIN | @ref LED1_PIN | @ref LED2_PIN |
|
|
| Macros | @ref LED0_ON, ... | @ref LED1_ON, ... | @ref LED2_ON, ... |
|
|
|
|
The LEDs can be controlled inside your RIOT application by using the LED
|
|
macros @ref LED0_ON, @ref LED0_OFF, and @ref LED0_TOGGLE for the red LED,
|
|
@ref LED1_ON, @ref LED1_OFF, and @ref LED1_TOGGLE for the yellow LED, and
|
|
@ref LED2_ON, @ref LED2_OFF, and @ref LED2_TOGGLE for the green LED.
|
|
|
|
There is also a yellow charge LED on the board indicating the charging
|
|
process of the battery.
|
|
|
|
#### 1 Beeper
|
|
|
|
| NAME | Beeper |
|
|
|:----- |:--------- |
|
|
| Pin | PB09 |
|
|
|
|
The board's beeper allows for acoustic feedback. It needs a PWM signal
|
|
between 1-5 kHz and is connected to pin PB9 and mapped to PWM_0 in RIOT. To
|
|
configure and use the beeper inside your application, you can use RIOT's
|
|
@ref drivers_periph_pwm.
|
|
|
|
|
|
### CC1101 Sub-1GHz RF Transceiver
|
|
|
|
The board has an integrated CC1101 Sub-1GHz RF Transceiver which is connected
|
|
to the MCU using the SPI. The transceiver allows for energy-efficient local
|
|
communication in the frequency band below 1 GHz. The driver for the CC1101
|
|
automatically loaded when the pseudo module `netdev_default` is used.
|
|
|
|
| Product | CC1101 |
|
|
|:------------------------- |:----------------------------------------------------------------- |
|
|
| Type | Sub-1GHz RF Transceiver |
|
|
| Vendor | Texas Instruments |
|
|
| Datasheet | [Datasheet](http://www.ti.com/lit/ds/symlink/cc1101.pdf) |
|
|
| Errata Sheet | [Errata Sheet](https://www.ti.com/lit/er/swrz020e/swrz020e.pdf) |
|
|
| Other Technical Documents | [TI Webpage](http://www.ti.com/product/CC1101/technicaldocuments) |
|
|
| Driver | @ref drivers_cc110x |
|
|
| SPI Device | SPI1 (Mapped to SPI_0 in RIOT) |
|
|
| SCL | PA5 |
|
|
| MISO | PA6 |
|
|
| MOSI | PA7 |
|
|
| CS | PB12 |
|
|
| GDO0 | PC4 |
|
|
| GDO2 | PC5 |
|
|
|
|
|
|
### CC3000 802.11b/g Wi-Fi Module
|
|
|
|
In addition to the CC1101, the MSB-IoT also features a CC3000 Wi-Fi Module.
|
|
The CC3000 is a self-contained wireless network module with a full embedded IPv4
|
|
TCP/IP stack that for example allows to use the MSB-IoT as a gateway node to the
|
|
internet. Please note that the CC3000 only supports operation in infrastructure
|
|
mode and therefore always needs to be connected to an access point to be used
|
|
for communication.
|
|
|
|
The CC3000's driver implementation for RIOT includes the full driver provided
|
|
by Texas Instruments. The API documentation from TI can be found
|
|
[here](http://software-dl.ti.com/ecs/simplelink/cc3000/public/doxygen_API/v1.14/html/index.html). To
|
|
use the CC3000 in RIOT, just add `USEMODULE += cc3000` to your application's
|
|
Makefile.
|
|
|
|
The driver for the CC3000 is not yet merged into RIOT's master branch. Please
|
|
see pull request [#2603](https://github.com/RIOT-OS/RIOT/pull/2603) for progress
|
|
on the inclusion.
|
|
|
|
| Product | CC3000 |
|
|
|:------------------------- |:----------------------------------------------------------------- |
|
|
| Type | 802.11b/g Wi-Fi Module |
|
|
| Vendor | Texas Instruments |
|
|
| Datasheet | [Datasheet](https://web.archive.org/web/20171109015601/http://www.ti.com/lit/ds/symlink/cc3000.pdf) |
|
|
| Errata Sheet | [Errata Sheet](http://www.ti.com/lit/er/swrz044b/swrz044b.pdf) |
|
|
| Other Technical Documents | [TI Webpage](https://web.archive.org/web/20190825013529/http://www.ti.com/product/CC3000/technicaldocuments) |
|
|
| TI Support Forum | [WiFi Forum](https://e2e.ti.com/support/wireless-connectivity/wifi/f/968) |
|
|
| Driver | [Pull Request](https://github.com/RIOT-OS/RIOT/pull/2603) |
|
|
| SPI Device | SPI2 (Mapped to SPI_1 in RIOT) |
|
|
| SCL | PB10 |
|
|
| MISO | PC2 |
|
|
| MOSI | PC3 |
|
|
| CS | PC1 |
|
|
| WLAN_ENABLE | PC13 |
|
|
| IRQ Line | PA10 |
|
|
|
|
|
|
### MPU-9150 Nine-Axis MotionTracking Device
|
|
|
|
The MSB-IoT is equipped with a MPU-9150 MotionTracking Device from
|
|
Invensense. The device combines a gyroscope, a magnetometer and an accelerometer
|
|
in one module.
|
|
|
|
Due to licensing issues, the current MPU-9150 driver implementation for RIOT
|
|
is not based on Invensense's 'Motion Driver' library and offers only a limited
|
|
set of features. Nonetheless, the RIOT driver allows to configure and read
|
|
values from all three sensors of the device. For an overview on the supported
|
|
features, you can check the driver's documentation in @ref drivers_mpu9x50.
|
|
|
|
A sample RIOT application for the MPU-9150 that utilizes the driver can be
|
|
found [here](https://github.com/RIOT-OS/RIOT/tree/master/tests/drivers/mpu9x50).
|
|
|
|
| Product | MPU-9150 |
|
|
|:--------------------- |:------------------------------------------------------------------------------------------------- |
|
|
| Type | Nine-Axis MotionTracking Device (Gyro, Accel and Compass) |
|
|
| Vendor | Invensense |
|
|
| Product Specification | [Product Specification](https://invensense.tdk.com/wp-content/uploads/2015/02/MPU-9150-Datasheet.pdf) |
|
|
| Register Map | [Register Map](https://invensense.tdk.com/wp-content/uploads/2015/02/MPU-9150-Register-Map.pdf) |
|
|
| Driver | @ref drivers_mpu9x50 |
|
|
| I²C Device | I2C1 (Mapped to I2C_0 in RIOT) |
|
|
| SCL | PB6 |
|
|
| SDA | PB7 |
|
|
| IRQ Line | PB11 |
|
|
|
|
|
|
### Other components
|
|
|
|
For the following components of the MSB-IoT, there is currently no support in
|
|
RIOT:
|
|
* [TCA6416 16-Bit I/O Expander](http://www.ti.com/product/tca6416)
|
|
* Micro-SD-Card Interface
|
|
|
|
|
|
# Compiling, Flashing and Debugging
|
|
|
|
This section only covers the automated functionality provided by RIOT's
|
|
makefile system. If you don't want to rely on RIOT's make targets for flashing
|
|
or debugging (for instance to use a different flashing tool), please check the
|
|
documentation of your used tools.
|
|
|
|
|
|
### Prerequisites
|
|
|
|
We strongly recommend the usage of the [GNU Tools for ARM Embedded Processors](https://launchpad.net/gcc-arm-embedded) toolchain for the MSB-IoT.
|
|
Support for other toolchains was not tested!
|
|
|
|
RIOT's provided functionality for debugging and flashing the MSB-IoT is based
|
|
on the [Open On-Chip Debugger](http://openocd.org/) tool. A wiki page with
|
|
installation instructions and some other information can be found
|
|
[here](https://github.com/RIOT-OS/RIOT/wiki/OpenOCD).
|
|
|
|
|
|
### Quick start
|
|
|
|
For a quick getting started guide you can stick to the steps explained on
|
|
[this page](https://github.com/RIOT-OS/RIOT/wiki/Getting-started-with-STM32F%5B0%7C3%7C4%5Ddiscovery-boards). Just make sure to use "msbiot" as the
|
|
respective board name.
|
|
|
|
|
|
### Compiling
|
|
|
|
```
|
|
fabian@fabian-ThinkPad-L412:~/myriot/RIOT/examples/hello-world$ BOARD=msbiot
|
|
make
|
|
Building application "hello-world" for "msbiot" with MCU "stm32f4".
|
|
|
|
"make" -C /home/fabian/myriot/RIOT/boards/msbiot
|
|
"make" -C /home/fabian/myriot/RIOT/core
|
|
"make" -C /home/fabian/myriot/RIOT/cpu/stm32f4
|
|
"make" -C /home/fabian/myriot/RIOT/cpu/cortex-m4_common
|
|
"make" -C /home/fabian/myriot/RIOT/cpu/stm32f4/periph
|
|
"make" -C /home/fabian/myriot/RIOT/drivers
|
|
"make" -C /home/fabian/myriot/RIOT/sys
|
|
"make" -C /home/fabian/myriot/RIOT/sys/auto_init
|
|
text data bss dec hex filename
|
|
11116 116 6444 17676 450c
|
|
/home/fabian/myriot/RIOT/examples/hello-world/bin/msbiot/hello-world.elf
|
|
```
|
|
|
|
|
|
### Flashing
|
|
|
|
```
|
|
fabian@fabian-ThinkPad-L412:~/myriot/RIOT/examples/hello-world$ BOARD=msbiot
|
|
make flash
|
|
Building application "hello-world" for "msbiot" with MCU "stm32f4".
|
|
|
|
"make" -C /home/fabian/myriot/RIOT/boards/msbiot
|
|
"make" -C /home/fabian/myriot/RIOT/core
|
|
"make" -C /home/fabian/myriot/RIOT/cpu/stm32f4
|
|
"make" -C /home/fabian/myriot/RIOT/cpu/cortex-m4_common
|
|
"make" -C /home/fabian/myriot/RIOT/cpu/stm32f4/periph
|
|
"make" -C /home/fabian/myriot/RIOT/drivers
|
|
"make" -C /home/fabian/myriot/RIOT/sys
|
|
"make" -C /home/fabian/myriot/RIOT/sys/auto_init
|
|
text data bss dec hex filename
|
|
11116 116 6444 17676 450c
|
|
/home/fabian/myriot/RIOT/examples/hello-world/bin/msbiot/hello-world.elf
|
|
/home/fabian/myriot/RIOT/dist/tools/openocd/openocd.sh flash
|
|
### Flashing Target ###
|
|
Open On-Chip Debugger 0.8.0 (2015-03-01-08:19)
|
|
Licensed under GNU GPL v2
|
|
For bug reports, read
|
|
http://openocd.sourceforge.net/doc/doxygen/bugs.html
|
|
srst_only separate srst_nogate srst_open_drain connect_deassert_srst
|
|
Info : This adapter doesn't support configurable speed
|
|
Info : STLINK v2 JTAG v17 API v2 SWIM v4 VID 0x0483 PID 0x3748
|
|
Info : using stlink api v2
|
|
Info : Target voltage: 3.183191
|
|
Info : stm32f4x.cpu: hardware has 0 breakpoints, 0 watchpoints
|
|
Error: jtag status contains invalid mode value - communication failure
|
|
Polling target stm32f4x.cpu failed, GDB will be halted. Polling again in
|
|
100ms
|
|
Error: jtag status contains invalid mode value - communication failure
|
|
Polling target stm32f4x.cpu failed, GDB will be halted. Polling again in
|
|
300ms
|
|
TargetName Type Endian TapName State
|
|
-- ------------------ ---------- ------ ------------------ ------------
|
|
0* stm32f4x.cpu hla_target little stm32f4x.cpu unknown
|
|
target state: halted
|
|
target halted due to debug-request, current mode: Thread
|
|
xPSR: 0x01000000 pc: 0x080002fc msp: 0x2000ab48
|
|
Polling target stm32f4x.cpu succeeded again
|
|
target state: halted
|
|
target halted due to debug-request, current mode: Thread
|
|
xPSR: 0x01000000 pc: 0x080002fc msp: 0x2000ab48
|
|
** Programming Started **
|
|
auto erase enabled
|
|
Info : stm32f4x errata detected - fixing incorrect MCU_IDCODE
|
|
Info : device id = 0x10006413
|
|
Info : flash size = 1024kbytes
|
|
target state: halted
|
|
target halted due to breakpoint, current mode: Thread
|
|
xPSR: 0x61000000 pc: 0x20000042 msp: 0x2000ab48
|
|
wrote 16384 bytes from file /home/fabian/myriot/RIOT/examples/hello-
|
|
world/bin/msbiot/hello-world.hex in 0.869447s (18.403 KiB/s)
|
|
** Programming Finished **
|
|
** Verify Started **
|
|
target state: halted
|
|
target halted due to breakpoint, current mode: Thread
|
|
xPSR: 0x61000000 pc: 0x2000002e msp: 0x2000ab48
|
|
verified 11232 bytes in 0.124356s (88.204 KiB/s)
|
|
** Verified OK **
|
|
shutdown command invoked
|
|
shutdown command invoked
|
|
Done flashing
|
|
```
|
|
|
|
|
|
### Debugging
|
|
|
|
```
|
|
fabian@fabian-ThinkPad-L412:~/myriot/RIOT/examples/hello-world$ BOARD=msbiot
|
|
make debug
|
|
/home/fabian/myriot/RIOT/dist/tools/openocd/openocd.sh debug
|
|
### Starting Debugging ###
|
|
Open On-Chip Debugger 0.8.0 (2015-03-01-08:19)
|
|
Licensed under GNU GPL v2
|
|
For bug reports, read
|
|
http://openocd.sourceforge.net/doc/doxygen/bugs.html
|
|
GNU gdb (GNU Tools for ARM Embedded Processors) 7.6.0.20131129-cvs
|
|
Copyright (C) 2013 Free Software Foundation, Inc.
|
|
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
|
|
This is free software: you are free to change and redistribute it.
|
|
There is NO WARRANTY, to the extent permitted by law. Type "show copying"
|
|
and "show warranty" for details.
|
|
This GDB was configured as "--host=i686-linux-gnu --target=arm-none-eabi".
|
|
For bug reporting instructions, please see:
|
|
<http://www.gnu.org/software/gdb/bugs/>...
|
|
Reading symbols from /home/fabian/myriot/RIOT/examples/hello-
|
|
world/bin/msbiot/hello-world.elf...done.
|
|
Remote debugging using :3333
|
|
reset_handler () at /home/fabian/myriot/RIOT/cpu/stm32f4/startup.c:54
|
|
54 {
|
|
(gdb)
|
|
```
|
|
|
|
|
|
### Using the UART for STDIO
|
|
|
|
The MCU's USART2 is set as the default input/output for the MSB-IoT inside
|
|
RIOT (mapped to UART_0). It is initialized and configured automatically for
|
|
every RIOT application and can be used for communication with your computer. The
|
|
easiest way is to use an USB to TTL adapter:
|
|
|
|
Step 1: Connect your adapter and the boards pin strip with RX<=>PA02,
|
|
TX<=>PA03 and GND<=>GND
|
|
|
|
Step 2: Done. The MCUs USART2 is used as STDIO.
|
|
*/
|