mirror of
https://github.com/RIOT-OS/RIOT.git
synced 2024-12-29 04:50:03 +01:00
boards/rpi-pico: add the Raspberry Pi Pico
Co-authored-by: Fabian Hüßler <fabian.huessler@st.ovgu.de> Co-authored-by: nickw96 <nick.weiler@st.ovgu.de> Co-authored-by: MaestroOnICe <justus.krebs@st.ovgu.de> Co-authored-by: Franz2000 <franz.freitag@st.ovgu.de>
This commit is contained in:
parent
e3821480f1
commit
d778e2be0d
17
boards/rpi-pico/Kconfig
Normal file
17
boards/rpi-pico/Kconfig
Normal file
@ -0,0 +1,17 @@
|
||||
# Copyright (C) 2021 Otto-von-Guericke-Universität Magdeburg
|
||||
#
|
||||
# This file is subject to the terms and conditions of the GNU Lesser
|
||||
# General Public License v2.1. See the file LICENSE in the top level
|
||||
# directory for more details.
|
||||
#
|
||||
|
||||
config BOARD
|
||||
default "rpi-pico" if BOARD_RPI_PICO
|
||||
|
||||
config BOARD_RPI_PICO
|
||||
bool
|
||||
default y
|
||||
select CPU_MODEL_RP2040
|
||||
select HAS_PERIPH_UART
|
||||
|
||||
select HAVE_SAUL_GPIO
|
||||
3
boards/rpi-pico/Makefile
Normal file
3
boards/rpi-pico/Makefile
Normal file
@ -0,0 +1,3 @@
|
||||
MODULE = board
|
||||
|
||||
include $(RIOTBASE)/Makefile.base
|
||||
3
boards/rpi-pico/Makefile.dep
Normal file
3
boards/rpi-pico/Makefile.dep
Normal file
@ -0,0 +1,3 @@
|
||||
ifneq (,$(filter saul_default,$(USEMODULE)))
|
||||
USEMODULE += saul_gpio
|
||||
endif
|
||||
4
boards/rpi-pico/Makefile.features
Normal file
4
boards/rpi-pico/Makefile.features
Normal file
@ -0,0 +1,4 @@
|
||||
CPU := rpx0xx
|
||||
|
||||
# Put defined MCU peripherals here (in alphabetical order)
|
||||
FEATURES_PROVIDED += periph_uart
|
||||
2
boards/rpi-pico/Makefile.include
Normal file
2
boards/rpi-pico/Makefile.include
Normal file
@ -0,0 +1,2 @@
|
||||
CPU_MODEL := RP2040
|
||||
PORT_LINUX ?= /dev/ttyUSB0
|
||||
29
boards/rpi-pico/board.c
Normal file
29
boards/rpi-pico/board.c
Normal file
@ -0,0 +1,29 @@
|
||||
/*
|
||||
* Copyright (C) 2021 Otto-von-Guericke-Universität Magdeburg
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_rpi_pico
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board specific implementations for the Raspberry Pi Pico
|
||||
*
|
||||
* @author Marian Buschsieweke <marian.buschsieweke@ovgu.de>
|
||||
* @}
|
||||
*/
|
||||
|
||||
#include "board.h"
|
||||
#include "periph/gpio.h"
|
||||
|
||||
void board_init(void)
|
||||
{
|
||||
/* initialize the CPU */
|
||||
cpu_init();
|
||||
|
||||
gpio_init(LED0_PIN, GPIO_OUT);
|
||||
}
|
||||
3
boards/rpi-pico/dist/openocd.cfg
vendored
Normal file
3
boards/rpi-pico/dist/openocd.cfg
vendored
Normal file
@ -0,0 +1,3 @@
|
||||
source [find target/rp2040-core0.cfg]
|
||||
$_TARGETNAME configure -rtos auto
|
||||
adapter speed 4000
|
||||
142
boards/rpi-pico/doc.txt
Normal file
142
boards/rpi-pico/doc.txt
Normal file
@ -0,0 +1,142 @@
|
||||
/**
|
||||
@defgroup boards_rpi_pico Raspberry Pi Pico
|
||||
@ingroup boards
|
||||
@brief Support for the RP2040 based Raspberry Pi Pico board
|
||||
|
||||
## Overview
|
||||
|
||||
The Raspberry Pi Pico is sold by the Raspberry Pi foundation for about 4 USD. It features the
|
||||
RP2040 MCU, a custom dual core ARM Cortex-M0+ MCU with relatively high CPU clock, plenty of RAM and
|
||||
some unique peripheral (the Programmable IO).
|
||||
|
||||
## Hardware
|
||||
|
||||

|
||||
|
||||
### MCU
|
||||
|
||||
The Programmable IO (PIO) peripheral and the SSI/QSPI peripheral that supports execution from
|
||||
flash (XIP) are the most distinguishing features of the MCU. The latter is especially important,
|
||||
since the RP2040 contains no internal flash.
|
||||
|
||||
| MCU | RP2040 |
|
||||
|:-----------|:------------------------------------------------------------ |
|
||||
| Family | (2x) ARM Cortex-M0+ |
|
||||
| Vendor | Raspberry Pi |
|
||||
| RAM | 264 KiB |
|
||||
| Flash | 2 MiB (up to 16 MiB) |
|
||||
| Frequency | up to 133 MHz |
|
||||
| FPU | no |
|
||||
| PIOs | 8 |
|
||||
| Timers | 1 x 64-bit |
|
||||
| ADCs | 1x 12-bit (4 channels + temperature sensor) |
|
||||
| UARTs | 2 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| RTCs | 1 |
|
||||
| USBs | 1 (USB 2.0) |
|
||||
| Watchdog | 1 |
|
||||
| SSI/QSPI | 1 (connected to flash, with XIP support) |
|
||||
| Vcc | 1.62V - 3.63V |
|
||||
| Datasheet | [Datasheet](https://www.raspberrypi.org/homepage-9df4b/static/rp2040@2x-d1b9dae9345ad2bd15a23c6a567edb5c.jpg) |
|
||||
|
||||
### User Interface
|
||||
|
||||
1 button (also used for boot selection) and 1 LED:
|
||||
|
||||
| Device | PIN |
|
||||
|:------ |:---------------- |
|
||||
| LED0 | 25 |
|
||||
| SW0 | QSPI_SS_N (*) |
|
||||
|
||||
(*) Since the switch is connected to the chip-select pin of the QSPI interface the flash chip RIOT
|
||||
is running from via XIP, the switch is difficult to read out from software. This is currently not
|
||||
supported.
|
||||
|
||||
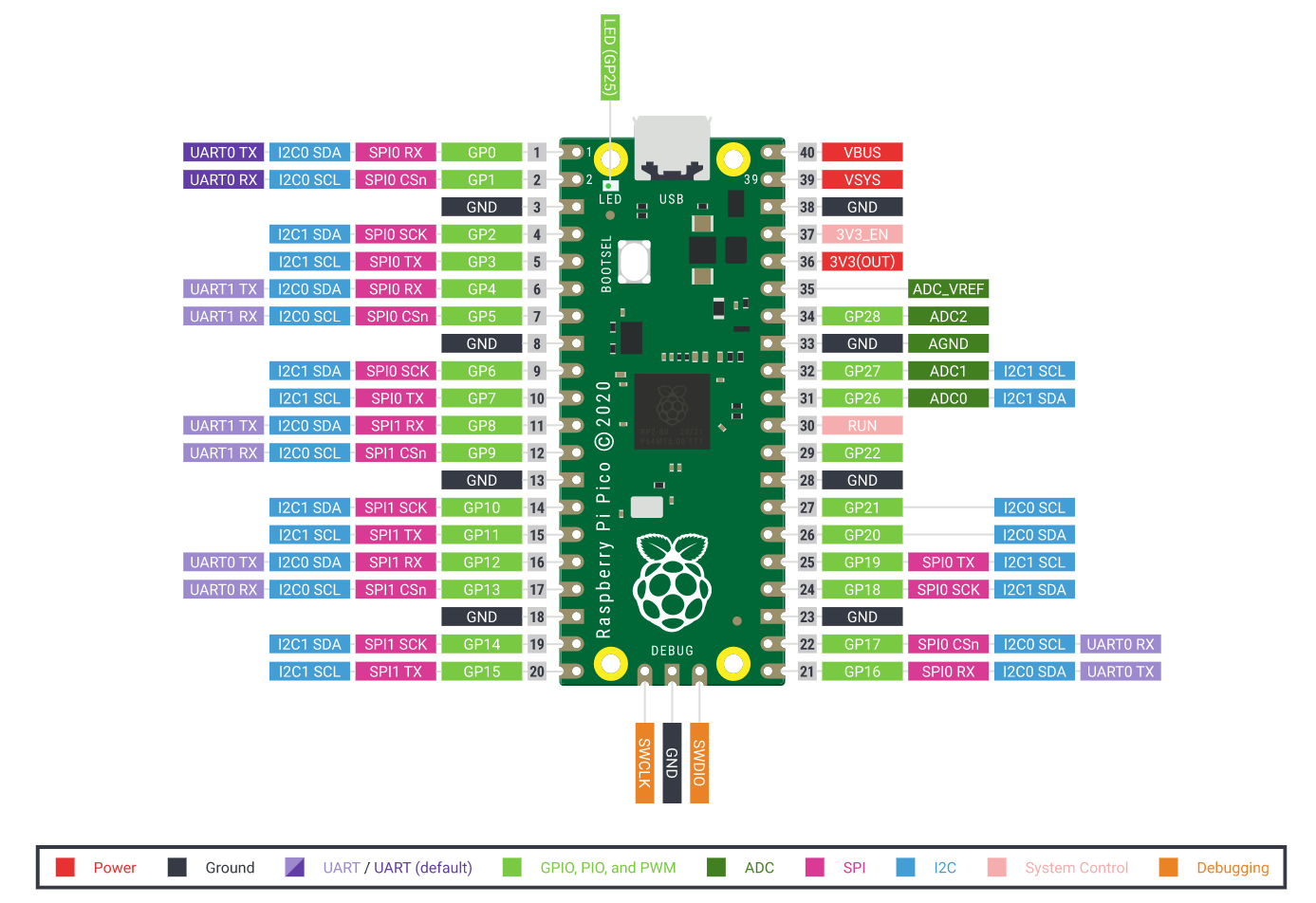
### Pinout
|
||||
|
||||
|
||||
|
||||
## Flashing the Board
|
||||
|
||||
### Flashing the Board Using OpenOCD
|
||||
|
||||
Currently (June 2021), only two methods for debugging via OpenOCD are supported:
|
||||
|
||||
1. Using a bit-banging low-level adapter, e.g. via the GPIOs of a Raspberry Pi 4B
|
||||
2. Using a virtual CMSIS-DAP adapter provided by the second CPU core via
|
||||
https://github.com/majbthrd/pico-debug
|
||||
|
||||
Since option 2 requires no additional hardware, this is currently the default. However, you need to
|
||||
first "flash" the gimme-cache variant of [pico-debug](https://github.com/majbthrd/pico-debug)
|
||||
into RAM using the UF2 bootloader. For this, plug in the USB cable while holding down the BOOTSEL
|
||||
button of the Pico and copy the `pico-debug-gimmecache.uf2` from the
|
||||
[latest pico-debug release](https://github.com/majbthrd/pico-debug/releases) into the virtual FAT
|
||||
formatted drive the bootloader provides. Once this drive is unmounted again, this will result in
|
||||
the Raspberry Pi Pico showing up as CMSIS-DAP debugger. Afterwards run:
|
||||
|
||||
```
|
||||
make BOARD=rpi-pico flash
|
||||
```
|
||||
|
||||
***Beware:*** The `rpi-pico` virtual debugger is not persistent and needs to be "flashed" into RAM
|
||||
again after each cold boot.
|
||||
|
||||
### Flashing the Board Using the Bootloader
|
||||
|
||||
Connect the device to your Micro-USB cable while the button (labeled `BOOTSEL` on the silkscreen
|
||||
of the PCB) is pressed to enter the bootloader. Afterwards run:
|
||||
|
||||
```
|
||||
make BOARD=rpi-pico PROGRAMMER=uf2conv flash
|
||||
```
|
||||
|
||||
### Flashing the Board Using J-Link
|
||||
|
||||
Connect the Board to an Segger J-Link debugger, e.g. the EDU mini debugger is relatively affordable,
|
||||
but limited to educational purposes. Afterwards run:
|
||||
|
||||
```
|
||||
make BOARD=rpi-pico PROGRAMMER=jlink flash
|
||||
```
|
||||
|
||||
## On-Chip Debugging
|
||||
|
||||
There are currently (June 2021) few hardware options for debugging the Raspberry Pi Pico:
|
||||
|
||||
1. Via J-Link using one of Seggers debuggers
|
||||
2. Via OpenOCD using a low-level bit-banging debugger (e.g. a Raspberry Pi 4B with the GPIOs
|
||||
connected to the Raspberry Pi Pico via jump wires)
|
||||
3. Via a recently updated [Black Magic Probe](https://github.com/blacksphere/blackmagic)
|
||||
|
||||
In addition, a software-only option is possible using
|
||||
[pico-debug](https://github.com/majbthrd/pico-debug). The default linker script reserved 16 KiB of
|
||||
RAM for this debugger, hence just "flash" the "gimme-cache" flavor into RAM using the UF2
|
||||
bootloader. Once this is done, debugging is as simple as running:
|
||||
|
||||
```
|
||||
make BOARD=rpi-pico debug
|
||||
```
|
||||
|
||||
***Beware:*** The `rpi-pico` virtual debugger is not persistent and needs to be "flashed" into RAM
|
||||
again after each cold boot. The initialization code of RIOT now seems to play well with the
|
||||
debugger, so it remains persistent on soft reboots. If you face issues with losing connection to
|
||||
the debugger on reboot, try `monitor reset init` in GDB to soft-reboot instead.
|
||||
|
||||
## Known Issues / Problems
|
||||
|
||||
### Early state Implementation
|
||||
|
||||
Currently no support for the following peripherals is implemented:
|
||||
|
||||
- Timers
|
||||
- ADC
|
||||
- SPI
|
||||
- I2C
|
||||
- USB
|
||||
- PIO
|
||||
- RTC
|
||||
- Watchdog
|
||||
- SMP support (multi CPU support is not implemented in RIOT)
|
||||
|
||||
*/
|
||||
52
boards/rpi-pico/include/board.h
Normal file
52
boards/rpi-pico/include/board.h
Normal file
@ -0,0 +1,52 @@
|
||||
/*
|
||||
* Copyright (C) 2021 Otto-von-Guericke-Universität Magdeburg
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_rpi_pico
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board specific definitions for the Raspberry Pi Pico
|
||||
*
|
||||
* @author Marian Buschsieweke <marian.buschsieweke@ovgu.de>
|
||||
*/
|
||||
|
||||
#ifndef BOARD_H
|
||||
#define BOARD_H
|
||||
|
||||
#include "cpu.h"
|
||||
#include "periph_conf.h"
|
||||
#include "periph_cpu.h"
|
||||
#include "periph/gpio.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @name LED configuration
|
||||
* @{
|
||||
*/
|
||||
#define LED0_PIN GPIO_PIN(0, 25)
|
||||
#define LED0_ON do {SIO->GPIO_OUT_SET.reg = 1UL << 25;} while (0)
|
||||
#define LED0_OFF do {SIO->GPIO_OUT_CLR.reg = 1UL << 25;} while (0)
|
||||
#define LED0_TOGGLE do {SIO->GPIO_OUT_XOR.reg = 1UL << 25;} while (0)
|
||||
#define LED0_NAME "LED(Green)"
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @brief Initialize board specific hardware, including clock, LEDs and std-IO
|
||||
*/
|
||||
void board_init(void);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* BOARD_H */
|
||||
/** @} */
|
||||
48
boards/rpi-pico/include/gpio_params.h
Normal file
48
boards/rpi-pico/include/gpio_params.h
Normal file
@ -0,0 +1,48 @@
|
||||
/*
|
||||
* Copyright (C) 2021 Franz Freitag, Justus Krebs, Nick Weiler
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_rpi_pico
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board specific configuration of direct mapped GPIOs
|
||||
*
|
||||
* @author Franz Freitag <franz.freitag@st.ovgu.de>
|
||||
* @author Justus Krebs <justus.krebs@st.ovgu.de>
|
||||
* @author Nick Weiler <nick.weiler@st.ovgu.de>
|
||||
*/
|
||||
|
||||
#ifndef GPIO_PARAMS_H
|
||||
#define GPIO_PARAMS_H
|
||||
|
||||
#include "board.h"
|
||||
#include "saul/periph.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @brief GPIO pin configuration
|
||||
*/
|
||||
static const saul_gpio_params_t saul_gpio_params[] =
|
||||
{
|
||||
{
|
||||
.name = LED0_NAME,
|
||||
.pin = LED0_PIN,
|
||||
.mode = GPIO_OUT,
|
||||
}
|
||||
};
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* GPIO_PARAMS_H */
|
||||
/** @} */
|
||||
55
boards/rpi-pico/include/periph_conf.h
Normal file
55
boards/rpi-pico/include/periph_conf.h
Normal file
@ -0,0 +1,55 @@
|
||||
/*
|
||||
* Copyright (C) 2021 Otto-von-Guericke-Universität Magdeburg
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_rpi_pico
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Configuration of CPU peripherals for the Raspberry Pi Pico
|
||||
* @author Marian Buschsieweke <marian.buschsieweke@ovgu.de>
|
||||
*/
|
||||
|
||||
#ifndef PERIPH_CONF_H
|
||||
#define PERIPH_CONF_H
|
||||
|
||||
#include <stdint.h>
|
||||
|
||||
#include "cpu.h"
|
||||
#include "periph_cpu.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
static const uart_conf_t uart_config[] = {
|
||||
{
|
||||
.dev = UART0,
|
||||
.rx_pin = GPIO_PIN(0, 1),
|
||||
.tx_pin = GPIO_PIN(0, 0),
|
||||
.irqn = UART0_IRQ_IRQn
|
||||
},
|
||||
{
|
||||
.dev = UART1,
|
||||
.rx_pin = GPIO_PIN(0, 9),
|
||||
.tx_pin = GPIO_PIN(0, 8),
|
||||
.irqn = UART1_IRQ_IRQn
|
||||
}
|
||||
};
|
||||
|
||||
#define UART_0_ISR (isr_uart0)
|
||||
#define UART_1_ISR (isr_uart1)
|
||||
|
||||
#define UART_NUMOF ARRAY_SIZE(uart_config)
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* PERIPH_CONF_H */
|
||||
/** @} */
|
||||
Loading…
Reference in New Issue
Block a user