diff --git a/boards/arduino-mkr1000/include/board.h b/boards/arduino-mkr1000/include/board.h
index b9949a4a1a..04473c2336 100644
--- a/boards/arduino-mkr1000/include/board.h
+++ b/boards/arduino-mkr1000/include/board.h
@@ -46,6 +46,8 @@ extern "C" {
#define LED0_ON (LED_PORT.OUTSET.reg = LED0_MASK)
#define LED0_OFF (LED_PORT.OUTCLR.reg = LED0_MASK)
#define LED0_TOGGLE (LED_PORT.OUTTGL.reg = LED0_MASK)
+
+#define LED0_NAME "LED(Green)"
/** @} */
#ifdef __cplusplus
diff --git a/boards/arduino-mkrfox1200/include/board.h b/boards/arduino-mkrfox1200/include/board.h
index f68c4c6e53..48fc32e6e9 100644
--- a/boards/arduino-mkrfox1200/include/board.h
+++ b/boards/arduino-mkrfox1200/include/board.h
@@ -57,6 +57,8 @@ extern "C" {
#define LED0_ON (LED_PORT.OUTSET.reg = LED0_MASK)
#define LED0_OFF (LED_PORT.OUTCLR.reg = LED0_MASK)
#define LED0_TOGGLE (LED_PORT.OUTTGL.reg = LED0_MASK)
+
+#define LED0_NAME "LED(Green)"
/** @} */
#ifdef __cplusplus
diff --git a/boards/arduino-mkrwan1300/Makefile b/boards/arduino-mkrwan1300/Makefile
new file mode 100644
index 0000000000..392f7d5c56
--- /dev/null
+++ b/boards/arduino-mkrwan1300/Makefile
@@ -0,0 +1,5 @@
+MODULE = board
+
+DIRS = $(RIOTBOARD)/common/arduino-mkr
+
+include $(RIOTBASE)/Makefile.base
diff --git a/boards/arduino-mkrwan1300/Makefile.dep b/boards/arduino-mkrwan1300/Makefile.dep
new file mode 100644
index 0000000000..698c09c572
--- /dev/null
+++ b/boards/arduino-mkrwan1300/Makefile.dep
@@ -0,0 +1 @@
+include $(RIOTBOARD)/common/arduino-mkr/Makefile.dep
diff --git a/boards/arduino-mkrwan1300/Makefile.features b/boards/arduino-mkrwan1300/Makefile.features
new file mode 100644
index 0000000000..21166716c7
--- /dev/null
+++ b/boards/arduino-mkrwan1300/Makefile.features
@@ -0,0 +1 @@
+include $(RIOTBOARD)/common/arduino-mkr/Makefile.features
diff --git a/boards/arduino-mkrwan1300/Makefile.include b/boards/arduino-mkrwan1300/Makefile.include
new file mode 100644
index 0000000000..d82a28871f
--- /dev/null
+++ b/boards/arduino-mkrwan1300/Makefile.include
@@ -0,0 +1,10 @@
+USEMODULE += boards_common_arduino-mkr
+
+ifeq ($(PROGRAMMER),jlink)
+ export MKR_JLINK_DEVICE = atsamd21
+endif
+
+include $(RIOTBOARD)/common/arduino-mkr/Makefile.include
+
+# add arduino-mkrwan1300 include path
+INCLUDES += -I$(RIOTBOARD)/$(BOARD)/include
diff --git a/boards/arduino-mkrwan1300/doc.txt b/boards/arduino-mkrwan1300/doc.txt
new file mode 100644
index 0000000000..9e56cedbb2
--- /dev/null
+++ b/boards/arduino-mkrwan1300/doc.txt
@@ -0,0 +1,37 @@
+/**
+ * @defgroup boards_arduino-mkrwan1300 Arduino MKR WAN 1300
+ * @ingroup boards
+ * @brief Support for the Arduino MKR WAN 1300 board.
+ *
+ * ### General information
+ *
+ * The [Arduino MKR WAN 1300](https://store.arduino.cc/mkr-wan-1300) board is
+ * a learning and development board that provides LoRa connectivity and is
+ * powered by an Atmel SAMD21 microcontroller.
+ *
+ * ### Pinout
+ *
+ * 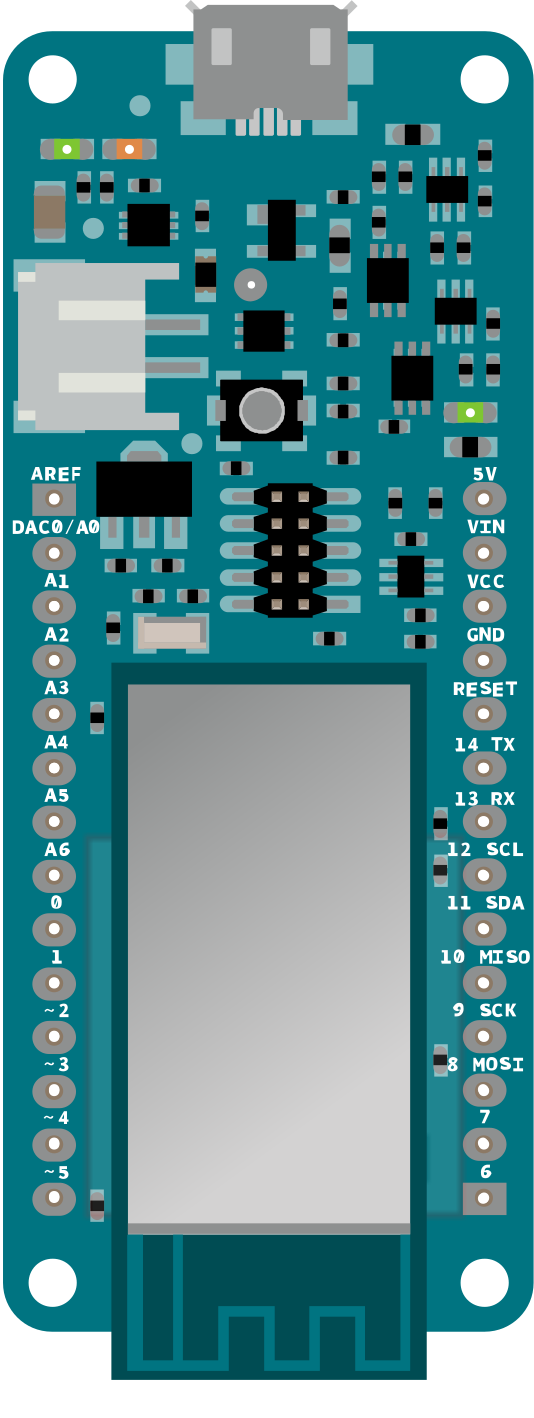 + *
+ * ### Flash the board
+ *
+ * 1. Put the board in bootloader mode by double tapping the reset button.
+ *
+ * ### Flash the board
+ *
+ * 1. Put the board in bootloader mode by double tapping the reset button.
+ * When the board is in bootloader mode, the user led (amber) oscillates
+ * smoothly.
+ *
+ *
+ * 2. Use `BOARD=arduino-mkrwan1300` with the `make` command.
+ * Example with `hello-world` application:
+ * ```
+ * make BOARD=arduino-mkrwan1300 -C examples/hello-world flash
+ * ```
+ *
+ * @warning Unplug the board from the anti-static protective foam before
+ * starting to use it otherwise it may not work as expected.
+ *
+ * ### Accessing STDIO via UART
+ *
+ * To access the STDIO of RIOT, a FTDI to USB converted needs to be plugged to
+ * the RX/TX pins on the board.
+ */
\ No newline at end of file
diff --git a/boards/arduino-mkrwan1300/include/board.h b/boards/arduino-mkrwan1300/include/board.h
new file mode 100644
index 0000000000..c0fe4cac20
--- /dev/null
+++ b/boards/arduino-mkrwan1300/include/board.h
@@ -0,0 +1,59 @@
+/*
+ * Copyright (C) 2018 Inria
+ *
+ * This file is subject to the terms and conditions of the GNU Lesser
+ * General Public License v2.1. See the file LICENSE in the top level
+ * directory for more details.
+ */
+
+/**
+ * @ingroup boards_arduino-mkrwan1300
+ * @brief Support for the Arduino MKRWAN1300 board.
+ * @{
+ *
+ * @file
+ * @brief Board specific definitions for the Arduino MKRWAN1300
+ * board
+ *
+ * @author Alexandre Abadie
+ */
+
+#ifndef BOARD_H
+#define BOARD_H
+
+#include "cpu.h"
+#include "periph_conf.h"
+#include "board_common.h"
+#include "arduino_pinmap.h"
+
+#ifdef __cplusplus
+extern "C" {
+#endif
+
+/**
+ * @brief The on-board LED is connected to pin 6 on this board
+ */
+#define ARDUINO_LED (6U)
+
+/**
+ * @name LED pin definitions and handlers
+ * @{
+ */
+#define LED0_PIN GPIO_PIN(PA, 20)
+
+#define LED_PORT PORT->Group[PA]
+#define LED0_MASK (1 << 20)
+
+#define LED0_ON (LED_PORT.OUTSET.reg = LED0_MASK)
+#define LED0_OFF (LED_PORT.OUTCLR.reg = LED0_MASK)
+#define LED0_TOGGLE (LED_PORT.OUTTGL.reg = LED0_MASK)
+
+#define LED0_NAME "LED(Amber)"
+/** @} */
+
+#ifdef __cplusplus
+}
+#endif
+
+#endif /* BOARD_H */
+/** @} */
diff --git a/boards/arduino-mkrwan1300/include/periph_conf.h b/boards/arduino-mkrwan1300/include/periph_conf.h
new file mode 100644
index 0000000000..663217e400
--- /dev/null
+++ b/boards/arduino-mkrwan1300/include/periph_conf.h
@@ -0,0 +1,94 @@
+/*
+ * Copyright (C) 2016 Freie Universität Berlin
+ * 2016-2018 Inria
+ *
+ * This file is subject to the terms and conditions of the GNU Lesser
+ * General Public License v2.1. See the file LICENSE in the top level
+ * directory for more details.
+ */
+
+/**
+ * @ingroup boards_arduino-mkrwan1300
+ * @{
+ *
+ * @file
+ * @brief Configuration of CPU peripherals for Arduino MKRWAN1300 board
+ *
+ * @author Thomas Eichinger
+ * @author Hauke Petersen
+ * @author Peter Kietzmann
+ * @author Alexandre Abadie
+ * @author Bumsik kim
+ */
+
+#ifndef PERIPH_CONF_H
+#define PERIPH_CONF_H
+
+#include "periph_cpu.h"
+#include "periph_conf_common.h"
+
+#ifdef __cplusplus
+extern "C" {
+#endif
+
+/**
+ * @name UART configuration
+ * @{
+ */
+static const uart_conf_t uart_config[] = {
+ {
+ .dev = &SERCOM5->USART,
+ .rx_pin = GPIO_PIN(PB,23), /* ARDUINO_PIN_13, RX Pin */
+ .tx_pin = GPIO_PIN(PB,22), /* ARDUINO_PIN_14, TX Pin */
+ .mux = GPIO_MUX_D,
+ .rx_pad = UART_PAD_RX_3,
+ .tx_pad = UART_PAD_TX_2,
+ .flags = UART_FLAG_NONE,
+ .gclk_src = GCLK_CLKCTRL_GEN_GCLK0
+ },
+ { /* LoRa module */
+ .dev = &SERCOM4->USART,
+ .rx_pin = GPIO_PIN(PA,15),
+ .tx_pin = GPIO_PIN(PA,12),
+ .mux = GPIO_MUX_D,
+ .rx_pad = UART_PAD_RX_3,
+ .tx_pad = UART_PAD_TX_0,
+ .flags = UART_FLAG_NONE,
+ .gclk_src = GCLK_CLKCTRL_GEN_GCLK0
+ },
+};
+
+/* interrupt function name mapping */
+#define UART_0_ISR isr_sercom5
+#define UART_1_ISR isr_sercom4
+
+#define UART_NUMOF (sizeof(uart_config) / sizeof(uart_config[0]))
+/** @} */
+
+/**
+ * @name SPI configuration
+ * @{
+ */
+static const spi_conf_t spi_config[] = {
+ {
+ .dev = &SERCOM1->SPI,
+ .miso_pin = GPIO_PIN(PA, 19), /* ARDUINO_PIN_8, SERCOM1-MISO */
+ .mosi_pin = GPIO_PIN(PA, 16), /* ARDUINO_PIN_10, SERCOM1-MOSI */
+ .clk_pin = GPIO_PIN(PA, 17), /* ARDUINO_PIN_9, SERCOM1-SCK */
+ .miso_mux = GPIO_MUX_C,
+ .mosi_mux = GPIO_MUX_C,
+ .clk_mux = GPIO_MUX_C,
+ .miso_pad = SPI_PAD_MISO_3,
+ .mosi_pad = SPI_PAD_MOSI_0_SCK_1
+ }
+};
+
+#define SPI_NUMOF (sizeof(spi_config) / sizeof(spi_config[0]))
+/** @} */
+
+#ifdef __cplusplus
+}
+#endif
+
+#endif /* PERIPH_CONF_H */
+/** @} */
diff --git a/boards/arduino-mkrzero/include/board.h b/boards/arduino-mkrzero/include/board.h
index 02d8a923c2..d35ebfd5d8 100644
--- a/boards/arduino-mkrzero/include/board.h
+++ b/boards/arduino-mkrzero/include/board.h
@@ -60,6 +60,8 @@ extern "C" {
#define LED0_ON (LED_PORT.OUTSET.reg = LED0_MASK)
#define LED0_OFF (LED_PORT.OUTCLR.reg = LED0_MASK)
#define LED0_TOGGLE (LED_PORT.OUTTGL.reg = LED0_MASK)
+
+#define LED0_NAME "LED(Green)"
/** @} */
#ifdef __cplusplus
diff --git a/boards/common/arduino-mkr/include/gpio_params.h b/boards/common/arduino-mkr/include/gpio_params.h
index df0e4c9af8..16db1acb5a 100644
--- a/boards/common/arduino-mkr/include/gpio_params.h
+++ b/boards/common/arduino-mkr/include/gpio_params.h
@@ -34,7 +34,7 @@ extern "C" {
static const saul_gpio_params_t saul_gpio_params[] =
{
{
- .name = "LED(Green)",
+ .name = LED0_NAME,
.pin = LED0_PIN,
.mode = GPIO_OUT
},
diff --git a/boards/common/arduino-mkr/include/periph_conf.h b/boards/common/arduino-mkr/include/periph_conf.h
index 8ce427b6c2..ec81467d20 100644
--- a/boards/common/arduino-mkr/include/periph_conf.h
+++ b/boards/common/arduino-mkr/include/periph_conf.h
@@ -25,102 +25,12 @@
#define PERIPH_CONF_H
#include "periph_cpu.h"
+#include "periph_conf_common.h"
#ifdef __cplusplus
extern "C" {
#endif
-/**
- * @name External oscillator and clock configuration
- *
- * For selection of the used CORECLOCK, we have implemented two choices:
- *
- * - usage of the PLL fed by the internal 8MHz oscillator divided by 8
- * - usage of the internal 8MHz oscillator directly, divided by N if needed
- *
- *
- * The PLL option allows for the usage of a wider frequency range and a more
- * stable clock with less jitter. This is why we use this option as default.
- *
- * The target frequency is computed from the PLL multiplier and the PLL divisor.
- * Use the following formula to compute your values:
- *
- * CORECLOCK = ((PLL_MUL + 1) * 1MHz) / PLL_DIV
- *
- * NOTE: The PLL circuit does not run with less than 32MHz while the maximum PLL
- * frequency is 96MHz. So PLL_MULL must be between 31 and 95!
- *
- *
- * The internal Oscillator used directly can lead to a slightly better power
- * efficiency to the cost of a less stable clock. Use this option when you know
- * what you are doing! The actual core frequency is adjusted as follows:
- *
- * CORECLOCK = 8MHz / DIV
- *
- * NOTE: A core clock frequency below 1MHz is not recommended
- *
- * @{
- */
-#define CLOCK_USE_PLL (1)
-
-#if CLOCK_USE_PLL
-/* edit these values to adjust the PLL output frequency */
-#define CLOCK_PLL_MUL (47U) /* must be >= 31 & <= 95 */
-#define CLOCK_PLL_DIV (1U) /* adjust to your needs */
-/* generate the actual used core clock frequency */
-#define CLOCK_CORECLOCK (((CLOCK_PLL_MUL + 1) * 1000000U) / CLOCK_PLL_DIV)
-#else
-/* edit this value to your needs */
-#define CLOCK_DIV (1U)
-/* generate the actual core clock frequency */
-#define CLOCK_CORECLOCK (8000000 / CLOCK_DIV)
-#endif
-/** @} */
-
-/**
- * @name Timer peripheral configuration
- * @{
- */
-static const tc32_conf_t timer_config[] = {
- { /* Timer 0 - System Clock */
- .dev = TC3,
- .irq = TC3_IRQn,
- .pm_mask = PM_APBCMASK_TC3,
- .gclk_ctrl = GCLK_CLKCTRL_ID_TCC2_TC3,
-#if CLOCK_USE_PLL || CLOCK_USE_XOSC32_DFLL
- .gclk_src = GCLK_CLKCTRL_GEN(1),
- .prescaler = TC_CTRLA_PRESCALER_DIV1,
-#else
- .gclk_src = GCLK_CLKCTRL_GEN(0),
- .prescaler = TC_CTRLA_PRESCALER_DIV8,
-#endif
- .flags = TC_CTRLA_MODE_COUNT16,
- },
- { /* Timer 1 */
- .dev = TC4,
- .irq = TC4_IRQn,
- .pm_mask = PM_APBCMASK_TC4 | PM_APBCMASK_TC5,
- .gclk_ctrl = GCLK_CLKCTRL_ID_TC4_TC5,
-#if CLOCK_USE_PLL || CLOCK_USE_XOSC32_DFLL
- .gclk_src = GCLK_CLKCTRL_GEN(1),
- .prescaler = TC_CTRLA_PRESCALER_DIV1,
-#else
- .gclk_src = GCLK_CLKCTRL_GEN(0),
- .prescaler = TC_CTRLA_PRESCALER_DIV8,
-#endif
- .flags = TC_CTRLA_MODE_COUNT32,
- }
-};
-
-#define TIMER_0_MAX_VALUE 0xffff
-
-/* interrupt function name mapping */
-#define TIMER_0_ISR isr_tc3
-#define TIMER_1_ISR isr_tc4
-
-#define TIMER_NUMOF ARRAY_SIZE(timer_config)
-/** @} */
-
/**
* @name UART configuration
* @{
@@ -144,63 +54,6 @@ static const uart_conf_t uart_config[] = {
#define UART_NUMOF ARRAY_SIZE(uart_config)
/** @} */
-/**
- * @name PWM configuration
- * @{
- */
-#define PWM_0_EN 1
-#define PWM_MAX_CHANNELS (2U)
-/* for compatibility with test application */
-#define PWM_0_CHANNELS PWM_MAX_CHANNELS
-
-/* PWM device configuration */
-static const pwm_conf_t pwm_config[] = {
-#if PWM_0_EN
- {TCC0, {
- /* GPIO pin, MUX value, TCC channel */
- { GPIO_PIN(PA, 10), GPIO_MUX_F, 2 }, /* ~2 */
- { GPIO_PIN(PA, 11), GPIO_MUX_F, 3 }, /* ~3 */
- }}
-#endif
-};
-
-/* number of devices that are actually defined */
-#define PWM_NUMOF ARRAY_SIZE(pwm_config)
-/** @} */
-
-/**
- * @name ADC configuration
- * @{
- */
-#define ADC_0_EN 1
-#define ADC_MAX_CHANNELS 14
-/* ADC 0 device configuration */
-#define ADC_0_DEV ADC
-#define ADC_0_IRQ ADC_IRQn
-
-/* ADC 0 Default values */
-#define ADC_0_CLK_SOURCE 0 /* GCLK_GENERATOR_0 */
-#define ADC_0_PRESCALER ADC_CTRLB_PRESCALER_DIV512
-
-#define ADC_0_NEG_INPUT ADC_INPUTCTRL_MUXNEG_GND
-#define ADC_0_GAIN_FACTOR_DEFAULT ADC_INPUTCTRL_GAIN_1X
-#define ADC_0_REF_DEFAULT ADC_REFCTRL_REFSEL_INT1V
-
-static const adc_conf_chan_t adc_channels[] = {
- /* port, pin, muxpos */
- {GPIO_PIN(PA, 2), ADC_INPUTCTRL_MUXPOS_PIN0}, /* A0 */
- {GPIO_PIN(PB, 2), ADC_INPUTCTRL_MUXPOS_PIN10}, /* A1 */
- {GPIO_PIN(PB, 3), ADC_INPUTCTRL_MUXPOS_PIN11}, /* A2 */
- {GPIO_PIN(PA, 4), ADC_INPUTCTRL_MUXPOS_PIN4}, /* A3 */
- {GPIO_PIN(PA, 5), ADC_INPUTCTRL_MUXPOS_PIN5}, /* A4 */
- {GPIO_PIN(PA, 6), ADC_INPUTCTRL_MUXPOS_PIN6}, /* A5 */
- {GPIO_PIN(PA, 7), ADC_INPUTCTRL_MUXPOS_PIN7}, /* A6 */
-};
-
-#define ADC_0_CHANNELS (7U)
-#define ADC_NUMOF ADC_0_CHANNELS
-/** @} */
-
/**
* @name SPI configuration
* @{
@@ -233,60 +86,6 @@ static const spi_conf_t spi_config[] = {
#define SPI_NUMOF ARRAY_SIZE(spi_config)
/** @} */
-/**
- * @name I2C configuration
- * @{
- */
-static const i2c_conf_t i2c_config[] = {
- {
- .dev = &(SERCOM0->I2CM),
- .speed = I2C_SPEED_NORMAL,
- .scl_pin = GPIO_PIN(PA, 9),
- .sda_pin = GPIO_PIN(PA, 8),
- .mux = GPIO_MUX_C,
- .gclk_src = GCLK_CLKCTRL_GEN_GCLK0,
- .flags = I2C_FLAG_NONE
- }
-};
-#define I2C_NUMOF ARRAY_SIZE(i2c_config)
-/** @} */
-
-/**
- * @name USB peripheral configuration
- * @{
- */
-static const sam0_common_usb_config_t sam_usbdev_config[] = {
- {
- .dm = GPIO_PIN(PA, 24),
- .dp = GPIO_PIN(PA, 25),
- .d_mux = GPIO_MUX_G,
- .device = &USB->DEVICE,
- }
-};
-/** @} */
-
-/**
- * @name RTC configuration
- * @{
- */
-#define RTC_NUMOF (1U)
-#define RTC_DEV RTC->MODE2
-/** @} */
-
-/**
- * @name RTT configuration
- * @{
- */
-#define RTT_NUMOF (1U)
-#define RTT_DEV RTC->MODE0
-#define RTT_IRQ RTC_IRQn
-#define RTT_IRQ_PRIO 10
-#define RTT_ISR isr_rtc
-#define RTT_MAX_VALUE (0xffffffff)
-#define RTT_FREQUENCY (32768U) /* in Hz. For changes see `rtt.c` */
-#define RTT_RUNSTDBY (1) /* Keep RTT running in sleep states */
-/** @} */
-
#ifdef __cplusplus
}
#endif
diff --git a/boards/common/arduino-mkr/include/periph_conf_common.h b/boards/common/arduino-mkr/include/periph_conf_common.h
new file mode 100644
index 0000000000..43681cd44e
--- /dev/null
+++ b/boards/common/arduino-mkr/include/periph_conf_common.h
@@ -0,0 +1,242 @@
+/*
+ * Copyright (C) 2016 Freie Universität Berlin
+ * 2016-2017 Inria
+ *
+ * This file is subject to the terms and conditions of the GNU Lesser
+ * General Public License v2.1. See the file LICENSE in the top level
+ * directory for more details.
+ */
+
+/**
+ * @ingroup boards_common_arduino-mkr
+ * @{
+ *
+ * @file
+ * @brief Common configuration for clock, timer, pwm, adc, rtc and rtt
+ * peripherals for Arduino MKR boards
+ *
+ * @author Thomas Eichinger
+ * @author Hauke Petersen
+ * @author Peter Kietzmann
+ * @author Alexandre Abadie
+ * @author Bumsik kim
+ */
+
+#ifndef PERIPH_CONF_COMMON_H
+#define PERIPH_CONF_COMMON_H
+
+#include "periph_cpu.h"
+
+#ifdef __cplusplus
+extern "C" {
+#endif
+
+
+/**
+ * @name External oscillator and clock configuration
+ *
+ * For selection of the used CORECLOCK, we have implemented two choices:
+ *
+ * - usage of the PLL fed by the internal 8MHz oscillator divided by 8
+ * - usage of the internal 8MHz oscillator directly, divided by N if needed
+ *
+ *
+ * The PLL option allows for the usage of a wider frequency range and a more
+ * stable clock with less jitter. This is why we use this option as default.
+ *
+ * The target frequency is computed from the PLL multiplier and the PLL divisor.
+ * Use the following formula to compute your values:
+ *
+ * CORECLOCK = ((PLL_MUL + 1) * 1MHz) / PLL_DIV
+ *
+ * NOTE: The PLL circuit does not run with less than 32MHz while the maximum PLL
+ * frequency is 96MHz. So PLL_MULL must be between 31 and 95!
+ *
+ *
+ * The internal Oscillator used directly can lead to a slightly better power
+ * efficiency to the cost of a less stable clock. Use this option when you know
+ * what you are doing! The actual core frequency is adjusted as follows:
+ *
+ * CORECLOCK = 8MHz / DIV
+ *
+ * NOTE: A core clock frequency below 1MHz is not recommended
+ *
+ * @{
+ */
+#define CLOCK_USE_PLL (1)
+
+#if CLOCK_USE_PLL
+/* edit these values to adjust the PLL output frequency */
+#define CLOCK_PLL_MUL (47U) /* must be >= 31 & <= 95 */
+#define CLOCK_PLL_DIV (1U) /* adjust to your needs */
+/* generate the actual used core clock frequency */
+#define CLOCK_CORECLOCK (((CLOCK_PLL_MUL + 1) * 1000000U) / CLOCK_PLL_DIV)
+#else
+/* edit this value to your needs */
+#define CLOCK_DIV (1U)
+/* generate the actual core clock frequency */
+#define CLOCK_CORECLOCK (8000000 / CLOCK_DIV)
+#endif
+/** @} */
+
+/**
+ * @name Timer peripheral configuration
+ * @{
+ */
+static const tc32_conf_t timer_config[] = {
+ { /* Timer 0 - System Clock */
+ .dev = TC3,
+ .irq = TC3_IRQn,
+ .pm_mask = PM_APBCMASK_TC3,
+ .gclk_ctrl = GCLK_CLKCTRL_ID_TCC2_TC3,
+#if CLOCK_USE_PLL || CLOCK_USE_XOSC32_DFLL
+ .gclk_src = GCLK_CLKCTRL_GEN(1),
+ .prescaler = TC_CTRLA_PRESCALER_DIV1,
+#else
+ .gclk_src = GCLK_CLKCTRL_GEN(0),
+ .prescaler = TC_CTRLA_PRESCALER_DIV8,
+#endif
+ .flags = TC_CTRLA_MODE_COUNT16,
+ },
+ { /* Timer 1 */
+ .dev = TC4,
+ .irq = TC4_IRQn,
+ .pm_mask = PM_APBCMASK_TC4 | PM_APBCMASK_TC5,
+ .gclk_ctrl = GCLK_CLKCTRL_ID_TC4_TC5,
+#if CLOCK_USE_PLL || CLOCK_USE_XOSC32_DFLL
+ .gclk_src = GCLK_CLKCTRL_GEN(1),
+ .prescaler = TC_CTRLA_PRESCALER_DIV1,
+#else
+ .gclk_src = GCLK_CLKCTRL_GEN(0),
+ .prescaler = TC_CTRLA_PRESCALER_DIV8,
+#endif
+ .flags = TC_CTRLA_MODE_COUNT32,
+ }
+};
+
+#define TIMER_0_MAX_VALUE 0xffff
+
+/* interrupt function name mapping */
+#define TIMER_0_ISR isr_tc3
+#define TIMER_1_ISR isr_tc4
+
+#define TIMER_NUMOF ARRAY_SIZE(timer_config)
+/** @} */
+
+/**
+ * @name PWM configuration
+ * @{
+ */
+#define PWM_0_EN 1
+#define PWM_MAX_CHANNELS (2U)
+/* for compatibility with test application */
+#define PWM_0_CHANNELS PWM_MAX_CHANNELS
+
+/* PWM device configuration */
+static const pwm_conf_t pwm_config[] = {
+#if PWM_0_EN
+ {TCC0, {
+ /* GPIO pin, MUX value, TCC channel */
+ { GPIO_PIN(PA, 10), GPIO_MUX_F, 2 }, /* ~2 */
+ { GPIO_PIN(PA, 11), GPIO_MUX_F, 3 }, /* ~3 */
+ }}
+#endif
+};
+
+/* number of devices that are actually defined */
+#define PWM_NUMOF ARRAY_SIZE(pwm_config)
+/** @} */
+
+/**
+ * @name ADC configuration
+ * @{
+ */
+#define ADC_0_EN 1
+#define ADC_MAX_CHANNELS 14
+/* ADC 0 device configuration */
+#define ADC_0_DEV ADC
+#define ADC_0_IRQ ADC_IRQn
+
+/* ADC 0 Default values */
+#define ADC_0_CLK_SOURCE 0 /* GCLK_GENERATOR_0 */
+#define ADC_0_PRESCALER ADC_CTRLB_PRESCALER_DIV512
+
+#define ADC_0_NEG_INPUT ADC_INPUTCTRL_MUXNEG_GND
+#define ADC_0_GAIN_FACTOR_DEFAULT ADC_INPUTCTRL_GAIN_1X
+#define ADC_0_REF_DEFAULT ADC_REFCTRL_REFSEL_INT1V
+
+static const adc_conf_chan_t adc_channels[] = {
+ /* port, pin, muxpos */
+ {GPIO_PIN(PA, 2), ADC_INPUTCTRL_MUXPOS_PIN0}, /* A0 */
+ {GPIO_PIN(PB, 2), ADC_INPUTCTRL_MUXPOS_PIN10}, /* A1 */
+ {GPIO_PIN(PB, 3), ADC_INPUTCTRL_MUXPOS_PIN11}, /* A2 */
+ {GPIO_PIN(PA, 4), ADC_INPUTCTRL_MUXPOS_PIN4}, /* A3 */
+ {GPIO_PIN(PA, 5), ADC_INPUTCTRL_MUXPOS_PIN5}, /* A4 */
+ {GPIO_PIN(PA, 6), ADC_INPUTCTRL_MUXPOS_PIN6}, /* A5 */
+ {GPIO_PIN(PA, 7), ADC_INPUTCTRL_MUXPOS_PIN7}, /* A6 */
+};
+
+#define ADC_0_CHANNELS (7U)
+#define ADC_NUMOF ADC_0_CHANNELS
+/** @} */
+
+/**
+ * @name I2C configuration
+ * @{
+ */
+static const i2c_conf_t i2c_config[] = {
+ {
+ .dev = &(SERCOM0->I2CM),
+ .speed = I2C_SPEED_NORMAL,
+ .scl_pin = GPIO_PIN(PA, 9),
+ .sda_pin = GPIO_PIN(PA, 8),
+ .mux = GPIO_MUX_C,
+ .gclk_src = GCLK_CLKCTRL_GEN_GCLK0,
+ .flags = I2C_FLAG_NONE
+ }
+};
+#define I2C_NUMOF ARRAY_SIZE(i2c_config)
+/** @} */
+
+/**
+ * @name RTC configuration
+ * @{
+ */
+#define RTC_NUMOF (1U)
+#define RTC_DEV RTC->MODE2
+/** @} */
+
+/**
+ * @name RTT configuration
+ * @{
+ */
+#define RTT_NUMOF (1U)
+#define RTT_DEV RTC->MODE0
+#define RTT_IRQ RTC_IRQn
+#define RTT_IRQ_PRIO 10
+#define RTT_ISR isr_rtc
+#define RTT_MAX_VALUE (0xffffffff)
+#define RTT_FREQUENCY (32768U) /* in Hz. For changes see `rtt.c` */
+#define RTT_RUNSTDBY (1) /* Keep RTT running in sleep states */
+/** @} */
+
+/**
+ * @name USB peripheral configuration
+ * @{
+ */
+static const sam0_common_usb_config_t sam_usbdev_config[] = {
+ {
+ .dm = GPIO_PIN(PA, 24),
+ .dp = GPIO_PIN(PA, 25),
+ .d_mux = GPIO_MUX_G,
+ .device = &USB->DEVICE,
+ }
+};
+/** @} */
+
+#ifdef __cplusplus
+}
+#endif
+
+#endif /* PERIPH_CONF_COMMON_H */
+/** @} */
diff --git a/examples/lua_REPL/Makefile b/examples/lua_REPL/Makefile
index 8a1ff7363c..8c79ab8242 100644
--- a/examples/lua_REPL/Makefile
+++ b/examples/lua_REPL/Makefile
@@ -15,7 +15,7 @@ BOARD_INSUFFICIENT_MEMORY := blackpill blackpill-128kib bluepill \
nucleo-f302r8 nucleo-f303k8 nucleo-f334r8 \
nucleo-f410rb nucleo-l031k6 nucleo-l053r8 \
opencm904 spark-core stm32f0discovery \
- airfy-beacon arduino-mkr1000 \
+ airfy-beacon arduino-mkr1000 arduino-mkrwan1300 \
arduino-mkrfox1200 arduino-mkrzero arduino-zero \
b-l072z-lrwan1 cc2538dk ek-lm4f120xl feather-m0 \
ikea-tradfri limifrog-v1 lobaro-lorabox \
diff --git a/tests/unittests/Makefile b/tests/unittests/Makefile
index 868a973750..3218535aba 100644
--- a/tests/unittests/Makefile
+++ b/tests/unittests/Makefile
@@ -25,6 +25,7 @@ BOARD_INSUFFICIENT_MEMORY := airfy-beacon \
arduino-mega2560 \
arduino-mkr1000 \
arduino-mkrfox1200 \
+ arduino-mkrwan1300 \
arduino-mkrzero \
arduino-nano \
arduino-uno \