diff --git a/boards/arduino-mkrwan1300/Makefile b/boards/arduino-mkrwan1300/Makefile
new file mode 100644
index 0000000000..392f7d5c56
--- /dev/null
+++ b/boards/arduino-mkrwan1300/Makefile
@@ -0,0 +1,5 @@
+MODULE = board
+
+DIRS = $(RIOTBOARD)/common/arduino-mkr
+
+include $(RIOTBASE)/Makefile.base
diff --git a/boards/arduino-mkrwan1300/Makefile.dep b/boards/arduino-mkrwan1300/Makefile.dep
new file mode 100644
index 0000000000..698c09c572
--- /dev/null
+++ b/boards/arduino-mkrwan1300/Makefile.dep
@@ -0,0 +1 @@
+include $(RIOTBOARD)/common/arduino-mkr/Makefile.dep
diff --git a/boards/arduino-mkrwan1300/Makefile.features b/boards/arduino-mkrwan1300/Makefile.features
new file mode 100644
index 0000000000..21166716c7
--- /dev/null
+++ b/boards/arduino-mkrwan1300/Makefile.features
@@ -0,0 +1 @@
+include $(RIOTBOARD)/common/arduino-mkr/Makefile.features
diff --git a/boards/arduino-mkrwan1300/Makefile.include b/boards/arduino-mkrwan1300/Makefile.include
new file mode 100644
index 0000000000..d82a28871f
--- /dev/null
+++ b/boards/arduino-mkrwan1300/Makefile.include
@@ -0,0 +1,10 @@
+USEMODULE += boards_common_arduino-mkr
+
+ifeq ($(PROGRAMMER),jlink)
+ export MKR_JLINK_DEVICE = atsamd21
+endif
+
+include $(RIOTBOARD)/common/arduino-mkr/Makefile.include
+
+# add arduino-mkrwan1300 include path
+INCLUDES += -I$(RIOTBOARD)/$(BOARD)/include
diff --git a/boards/arduino-mkrwan1300/doc.txt b/boards/arduino-mkrwan1300/doc.txt
new file mode 100644
index 0000000000..9e56cedbb2
--- /dev/null
+++ b/boards/arduino-mkrwan1300/doc.txt
@@ -0,0 +1,37 @@
+/**
+ * @defgroup boards_arduino-mkrwan1300 Arduino MKR WAN 1300
+ * @ingroup boards
+ * @brief Support for the Arduino MKR WAN 1300 board.
+ *
+ * ### General information
+ *
+ * The [Arduino MKR WAN 1300](https://store.arduino.cc/mkr-wan-1300) board is
+ * a learning and development board that provides LoRa connectivity and is
+ * powered by an Atmel SAMD21 microcontroller.
+ *
+ * ### Pinout
+ *
+ * 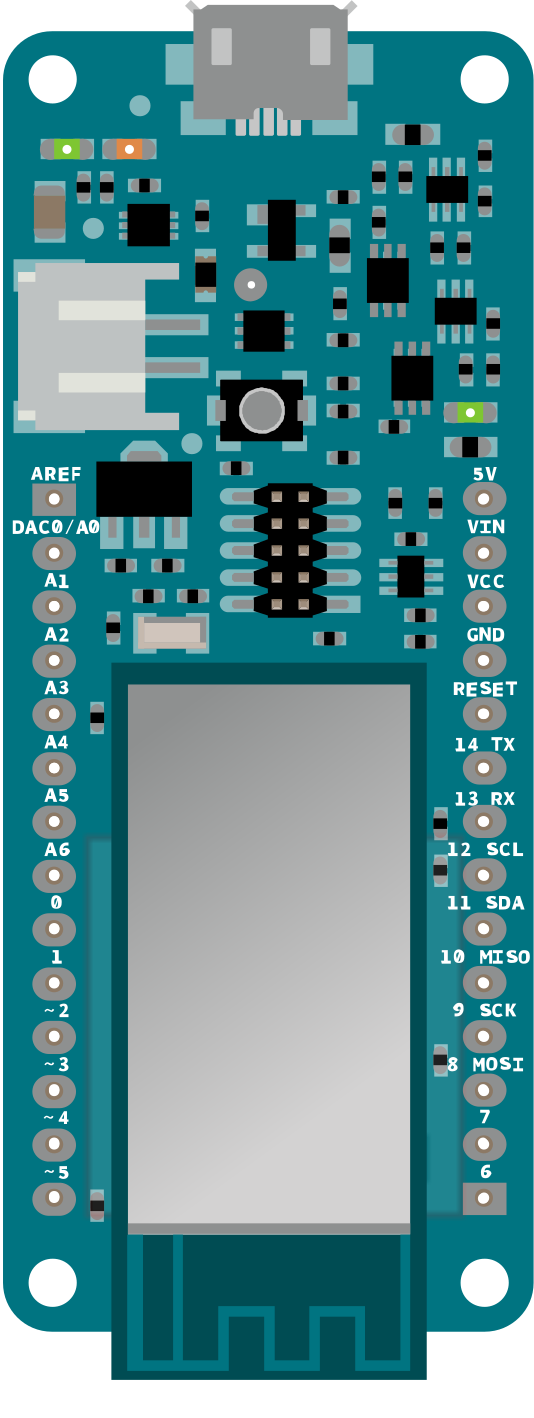 + *
+ * ### Flash the board
+ *
+ * 1. Put the board in bootloader mode by double tapping the reset button.
+ *
+ * ### Flash the board
+ *
+ * 1. Put the board in bootloader mode by double tapping the reset button.
+ * When the board is in bootloader mode, the user led (amber) oscillates
+ * smoothly.
+ *
+ *
+ * 2. Use `BOARD=arduino-mkrwan1300` with the `make` command.
+ * Example with `hello-world` application:
+ * ```
+ * make BOARD=arduino-mkrwan1300 -C examples/hello-world flash
+ * ```
+ *
+ * @warning Unplug the board from the anti-static protective foam before
+ * starting to use it otherwise it may not work as expected.
+ *
+ * ### Accessing STDIO via UART
+ *
+ * To access the STDIO of RIOT, a FTDI to USB converted needs to be plugged to
+ * the RX/TX pins on the board.
+ */
\ No newline at end of file
diff --git a/boards/arduino-mkrwan1300/include/board.h b/boards/arduino-mkrwan1300/include/board.h
new file mode 100644
index 0000000000..c0fe4cac20
--- /dev/null
+++ b/boards/arduino-mkrwan1300/include/board.h
@@ -0,0 +1,59 @@
+/*
+ * Copyright (C) 2018 Inria
+ *
+ * This file is subject to the terms and conditions of the GNU Lesser
+ * General Public License v2.1. See the file LICENSE in the top level
+ * directory for more details.
+ */
+
+/**
+ * @ingroup boards_arduino-mkrwan1300
+ * @brief Support for the Arduino MKRWAN1300 board.
+ * @{
+ *
+ * @file
+ * @brief Board specific definitions for the Arduino MKRWAN1300
+ * board
+ *
+ * @author Alexandre Abadie
+ */
+
+#ifndef BOARD_H
+#define BOARD_H
+
+#include "cpu.h"
+#include "periph_conf.h"
+#include "board_common.h"
+#include "arduino_pinmap.h"
+
+#ifdef __cplusplus
+extern "C" {
+#endif
+
+/**
+ * @brief The on-board LED is connected to pin 6 on this board
+ */
+#define ARDUINO_LED (6U)
+
+/**
+ * @name LED pin definitions and handlers
+ * @{
+ */
+#define LED0_PIN GPIO_PIN(PA, 20)
+
+#define LED_PORT PORT->Group[PA]
+#define LED0_MASK (1 << 20)
+
+#define LED0_ON (LED_PORT.OUTSET.reg = LED0_MASK)
+#define LED0_OFF (LED_PORT.OUTCLR.reg = LED0_MASK)
+#define LED0_TOGGLE (LED_PORT.OUTTGL.reg = LED0_MASK)
+
+#define LED0_NAME "LED(Amber)"
+/** @} */
+
+#ifdef __cplusplus
+}
+#endif
+
+#endif /* BOARD_H */
+/** @} */
diff --git a/boards/arduino-mkrwan1300/include/periph_conf.h b/boards/arduino-mkrwan1300/include/periph_conf.h
new file mode 100644
index 0000000000..663217e400
--- /dev/null
+++ b/boards/arduino-mkrwan1300/include/periph_conf.h
@@ -0,0 +1,94 @@
+/*
+ * Copyright (C) 2016 Freie Universität Berlin
+ * 2016-2018 Inria
+ *
+ * This file is subject to the terms and conditions of the GNU Lesser
+ * General Public License v2.1. See the file LICENSE in the top level
+ * directory for more details.
+ */
+
+/**
+ * @ingroup boards_arduino-mkrwan1300
+ * @{
+ *
+ * @file
+ * @brief Configuration of CPU peripherals for Arduino MKRWAN1300 board
+ *
+ * @author Thomas Eichinger
+ * @author Hauke Petersen
+ * @author Peter Kietzmann
+ * @author Alexandre Abadie
+ * @author Bumsik kim
+ */
+
+#ifndef PERIPH_CONF_H
+#define PERIPH_CONF_H
+
+#include "periph_cpu.h"
+#include "periph_conf_common.h"
+
+#ifdef __cplusplus
+extern "C" {
+#endif
+
+/**
+ * @name UART configuration
+ * @{
+ */
+static const uart_conf_t uart_config[] = {
+ {
+ .dev = &SERCOM5->USART,
+ .rx_pin = GPIO_PIN(PB,23), /* ARDUINO_PIN_13, RX Pin */
+ .tx_pin = GPIO_PIN(PB,22), /* ARDUINO_PIN_14, TX Pin */
+ .mux = GPIO_MUX_D,
+ .rx_pad = UART_PAD_RX_3,
+ .tx_pad = UART_PAD_TX_2,
+ .flags = UART_FLAG_NONE,
+ .gclk_src = GCLK_CLKCTRL_GEN_GCLK0
+ },
+ { /* LoRa module */
+ .dev = &SERCOM4->USART,
+ .rx_pin = GPIO_PIN(PA,15),
+ .tx_pin = GPIO_PIN(PA,12),
+ .mux = GPIO_MUX_D,
+ .rx_pad = UART_PAD_RX_3,
+ .tx_pad = UART_PAD_TX_0,
+ .flags = UART_FLAG_NONE,
+ .gclk_src = GCLK_CLKCTRL_GEN_GCLK0
+ },
+};
+
+/* interrupt function name mapping */
+#define UART_0_ISR isr_sercom5
+#define UART_1_ISR isr_sercom4
+
+#define UART_NUMOF (sizeof(uart_config) / sizeof(uart_config[0]))
+/** @} */
+
+/**
+ * @name SPI configuration
+ * @{
+ */
+static const spi_conf_t spi_config[] = {
+ {
+ .dev = &SERCOM1->SPI,
+ .miso_pin = GPIO_PIN(PA, 19), /* ARDUINO_PIN_8, SERCOM1-MISO */
+ .mosi_pin = GPIO_PIN(PA, 16), /* ARDUINO_PIN_10, SERCOM1-MOSI */
+ .clk_pin = GPIO_PIN(PA, 17), /* ARDUINO_PIN_9, SERCOM1-SCK */
+ .miso_mux = GPIO_MUX_C,
+ .mosi_mux = GPIO_MUX_C,
+ .clk_mux = GPIO_MUX_C,
+ .miso_pad = SPI_PAD_MISO_3,
+ .mosi_pad = SPI_PAD_MOSI_0_SCK_1
+ }
+};
+
+#define SPI_NUMOF (sizeof(spi_config) / sizeof(spi_config[0]))
+/** @} */
+
+#ifdef __cplusplus
+}
+#endif
+
+#endif /* PERIPH_CONF_H */
+/** @} */