mirror of
https://github.com/RIOT-OS/RIOT.git
synced 2024-12-29 04:50:03 +01:00
Merge branch 'master' into rust-gcoap-add-saul
Makefile.ci was completely removed, pending regeneration
This commit is contained in:
commit
3abedbbb19
9
.cargo/config.toml
Normal file
9
.cargo/config.toml
Normal file
@ -0,0 +1,9 @@
|
||||
# Between RIOT releases, this file points all projects in the tree to git
|
||||
# versions (still respecting Cargo.lock).
|
||||
#
|
||||
# Authors of out-of-tree applications can use the same lines in their
|
||||
# Cargo.toml, copy this file over, or just use the released versions.
|
||||
|
||||
[patch.crates-io]
|
||||
riot-sys = { git = "https://github.com/RIOT-OS/rust-riot-sys" }
|
||||
riot-wrappers = { git = "https://github.com/RIOT-OS/rust-riot-wrappers" }
|
||||
@ -1,25 +0,0 @@
|
||||
# CircleCI configuration file used to build and get a preview of the generated
|
||||
# Doxygen documentation.
|
||||
# Note that the job on CircleCI takes around 30 minutes to complete because
|
||||
# copying +19k individual files to their cloud storage is very slow.
|
||||
|
||||
version: 2
|
||||
|
||||
jobs:
|
||||
doc-build:
|
||||
docker:
|
||||
- image: riot/static-test-tools
|
||||
steps:
|
||||
- checkout
|
||||
- run: make doc
|
||||
- run:
|
||||
command: |
|
||||
cp -R doc/doxygen/html /doc
|
||||
- store_artifacts:
|
||||
path: /doc
|
||||
|
||||
workflows:
|
||||
version: 2
|
||||
doc-build:
|
||||
jobs:
|
||||
- doc-build
|
||||
16
.drone.yml
16
.drone.yml
@ -1,16 +0,0 @@
|
||||
pipeline:
|
||||
run_tests:
|
||||
image: riot/riotbuild:latest
|
||||
environment:
|
||||
- CLICOLOR_FORCE=1
|
||||
- NPROC_MAX=4
|
||||
commands:
|
||||
- pwd
|
||||
- printenv
|
||||
- git status
|
||||
- git remote -v
|
||||
- ./dist/tools/ci/build_and_test.sh
|
||||
matrix:
|
||||
BUILDTEST_MCU_GROUP:
|
||||
- static-tests
|
||||
- host
|
||||
2
.github/ISSUE_TEMPLATE/bug_report.md
vendored
2
.github/ISSUE_TEMPLATE/bug_report.md
vendored
@ -38,7 +38,7 @@ Please paste or specifically describe the actual output.
|
||||
|
||||
#### Versions
|
||||
<!--
|
||||
Operating system: Mac OSX, Linux, Vagrant VM
|
||||
Operating system: macOS, Linux, Vagrant VM
|
||||
Build environment: GCC, CLang versions (you can run the following command from
|
||||
the RIOT base directory: make print-versions).
|
||||
-->
|
||||
|
||||
9
.github/labeler.yml
vendored
9
.github/labeler.yml
vendored
@ -17,9 +17,10 @@
|
||||
- "**/*.mk"
|
||||
|
||||
"Area: CI":
|
||||
- ".circleci/**/*"
|
||||
- ".github/**/*.yml"
|
||||
- ".murdock"
|
||||
- ".murdock.yml"
|
||||
- "bors.toml"
|
||||
|
||||
"Area: CoAP":
|
||||
- "sys/net/application_layer/*coap/**/*"
|
||||
@ -117,7 +118,9 @@
|
||||
|
||||
"Platform: native":
|
||||
- "boards/native/**/*"
|
||||
- "boards/native64/**/*"
|
||||
- "cpu/native/**/*"
|
||||
- "makefiles/arch/native.inc.mk"
|
||||
|
||||
"Platform: ARM":
|
||||
- "cpu/arm7_common/**/*"
|
||||
@ -142,10 +145,6 @@
|
||||
"Platform: ESP":
|
||||
- "cpu/esp*/**/*"
|
||||
|
||||
"Platform: MIPS":
|
||||
- "cpu/mips*/**/*"
|
||||
- "makefiles/arch/mips.inc.mk"
|
||||
|
||||
"Platform: MSP":
|
||||
- "cpu/msp*/**/*"
|
||||
- "makefiles/arch/msp430.inc.mk"
|
||||
|
||||
37
.github/workflows/check-commits.yml
vendored
Normal file
37
.github/workflows/check-commits.yml
vendored
Normal file
@ -0,0 +1,37 @@
|
||||
name: check-commits
|
||||
on:
|
||||
pull_request:
|
||||
types: [opened, reopened, synchronize]
|
||||
merge_group:
|
||||
|
||||
jobs:
|
||||
check-commits:
|
||||
runs-on: ubuntu-latest
|
||||
if: ${{ github.base_ref }}
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
check: [commit-msg, pr_check]
|
||||
steps:
|
||||
- uses: actions/checkout@main
|
||||
with:
|
||||
# Use the SHA of the PR branch as-is, not the PR branch merged
|
||||
# in master (default behavior in GH actions)
|
||||
# See https://github.com/actions/checkout#checkout-pull-request-head-commit-instead-of-merge-commit
|
||||
ref: ${{ github.event.pull_request.head.sha }}
|
||||
fetch-depth: 0
|
||||
- name: Fetch base branch
|
||||
run:
|
||||
git fetch origin '${{ github.base_ref }}:${{ github.base_ref }}'
|
||||
- name: Run checks
|
||||
run: |
|
||||
./dist/tools/${{ matrix.check }}/check.sh "${{ github.base_ref }}"
|
||||
check-commits-success:
|
||||
needs: check-commits
|
||||
if: always() && github.event_name != 'merge_group'
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- name: check-commits succeeded
|
||||
uses: re-actors/alls-green@release/v1
|
||||
with:
|
||||
jobs: ${{ toJSON(needs) }}
|
||||
20
.github/workflows/check-labels.yml
vendored
Normal file
20
.github/workflows/check-labels.yml
vendored
Normal file
@ -0,0 +1,20 @@
|
||||
name: check-labels
|
||||
on:
|
||||
pull_request_target:
|
||||
types: [opened, reopened, labeled, unlabeled, synchronize]
|
||||
pull_request_review:
|
||||
types: [submitted, dismissed]
|
||||
merge_group:
|
||||
|
||||
jobs:
|
||||
check-labels:
|
||||
if: github.event_name != 'merge_group'
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: RIOT-OS/check-labels-action@v1.1.1
|
||||
with:
|
||||
access_token: ${{ secrets.GITHUB_TOKEN }}
|
||||
unset_labels: 'CI: needs squashing,State: waiting for CI update,State: waiting for other PR,Process: blocked by feature freeze'
|
||||
cond_labels: '(Process: needs >1 ACK,review.approvals>1),(Area: RDM,review.approvals>2)'
|
||||
missing_approvals_label: 'Process: missing approvals'
|
||||
pull_request: ${{ github.event.pull_request.number }}
|
||||
36
.github/workflows/check-pr.yml
vendored
36
.github/workflows/check-pr.yml
vendored
@ -1,36 +0,0 @@
|
||||
name: check-pr
|
||||
on:
|
||||
pull_request:
|
||||
types: [opened, reopened, labeled, unlabeled, synchronize]
|
||||
pull_request_review:
|
||||
types: [submitted, dismissed]
|
||||
jobs:
|
||||
check-labels:
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: RIOT-OS/check-labels-action@v1.0.0
|
||||
with:
|
||||
access_token: ${{ secrets.GITHUB_TOKEN }}
|
||||
unset_labels: 'CI: needs squashing,State: waiting for other PR,Process: blocked by feature freeze'
|
||||
cond_labels: '(Process: needs >1 ACK,review.approvals>1),(Area: RDM,review.approvals>2)'
|
||||
check-commits:
|
||||
runs-on: ubuntu-latest
|
||||
if: ${{ github.base_ref }}
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
check: [commit-msg, pr_check]
|
||||
steps:
|
||||
- uses: actions/checkout@master
|
||||
with:
|
||||
# Use the SHA of the PR branch as-is, not the PR branch merged
|
||||
# in master (default behavior in GH actions)
|
||||
# See https://github.com/actions/checkout#checkout-pull-request-head-commit-instead-of-merge-commit
|
||||
ref: ${{ github.event.pull_request.head.sha }}
|
||||
fetch-depth: 0
|
||||
- name: Fetch base branch
|
||||
run:
|
||||
git fetch origin '${{ github.base_ref }}:${{ github.base_ref }}'
|
||||
- name: Run checks
|
||||
run: |
|
||||
./dist/tools/${{ matrix.check }}/check.sh "${{ github.base_ref }}"
|
||||
13
.github/workflows/circleci.yml
vendored
13
.github/workflows/circleci.yml
vendored
@ -1,13 +0,0 @@
|
||||
name: doc-build-artifact
|
||||
on: [status]
|
||||
jobs:
|
||||
circleci_artifacts_redirector_job:
|
||||
runs-on: ubuntu-latest
|
||||
name: Run CircleCI artifacts redirector
|
||||
steps:
|
||||
- name: GitHub Action step
|
||||
uses: larsoner/circleci-artifacts-redirector-action@master
|
||||
with:
|
||||
repo-token: ${{ secrets.GITHUB_TOKEN }}
|
||||
artifact-path: 0/doc/index.html
|
||||
circleci-jobs: doc-build
|
||||
4
.github/workflows/labeler.yml
vendored
4
.github/workflows/labeler.yml
vendored
@ -3,12 +3,14 @@ name: pr-labeler
|
||||
on:
|
||||
pull_request_target:
|
||||
types: [opened, synchronize, reopened]
|
||||
merge_group:
|
||||
|
||||
jobs:
|
||||
triage:
|
||||
runs-on: ubuntu-latest
|
||||
if: github.event_name != 'merge_group'
|
||||
steps:
|
||||
- uses: actions/labeler@main
|
||||
- uses: actions/labeler@v4
|
||||
with:
|
||||
repo-token: "${{ secrets.GITHUB_TOKEN }}"
|
||||
sync-labels: true
|
||||
|
||||
41
.github/workflows/release-test.yml
vendored
41
.github/workflows/release-test.yml
vendored
@ -44,7 +44,7 @@ env:
|
||||
# to hit Github Limit of 6h per job.
|
||||
jobs:
|
||||
tasks:
|
||||
runs-on: ubuntu-latest
|
||||
runs-on: ubuntu-22.04
|
||||
timeout-minutes: 360
|
||||
strategy:
|
||||
fail-fast: false
|
||||
@ -78,20 +78,28 @@ jobs:
|
||||
ssh -oStrictHostKeyChecking=accept-new \
|
||||
${IOTLAB_USER}@saclay.iot-lab.info exit
|
||||
- name: Fetch host key from IoT-LAB lille site
|
||||
# Not being used in the most recent release specs but kept in for
|
||||
# backwords compatibility
|
||||
if: ${{ matrix.pytest_mark == 'iotlab_creds' }}
|
||||
run: |
|
||||
IOTLAB_USER=$(cat ~/.iotlabrc | cut -f1 -d:)
|
||||
ssh -oStrictHostKeyChecking=accept-new \
|
||||
${IOTLAB_USER}@lille.iot-lab.info exit
|
||||
- name: Fetch host key from IoT-LAB strasbourg site
|
||||
if: ${{ matrix.pytest_mark == 'iotlab_creds' }}
|
||||
run: |
|
||||
IOTLAB_USER=$(cat ~/.iotlabrc | cut -f1 -d:)
|
||||
ssh -oStrictHostKeyChecking=accept-new \
|
||||
${IOTLAB_USER}@strasbourg.iot-lab.info exit
|
||||
- name: Checkout Release-Specs
|
||||
uses: actions/checkout@v2
|
||||
uses: actions/checkout@main
|
||||
with:
|
||||
repository: RIOT-OS/Release-Specs
|
||||
path: Release-Specs
|
||||
fetch-depth: 1
|
||||
ref: ${{ github.event.inputs.release_specs_version }}
|
||||
- name: Checkout RIOT
|
||||
uses: actions/checkout@v2
|
||||
uses: actions/checkout@main
|
||||
with:
|
||||
repository: RIOT-OS/RIOT
|
||||
path: RIOT
|
||||
@ -116,7 +124,13 @@ jobs:
|
||||
if: ${{ matrix.pytest_mark == 'not iotlab_creds' }}
|
||||
run: |
|
||||
sudo RIOT/dist/tools/tapsetup/tapsetup -c 11
|
||||
- name: Install native dependencies
|
||||
if: ${{ matrix.pytest_mark == 'not iotlab_creds' }}
|
||||
run: |
|
||||
sudo apt-get update
|
||||
sudo apt-get install lib32asan6
|
||||
- name: Run release tests
|
||||
id: tests
|
||||
timeout-minutes: 350
|
||||
run: |
|
||||
RIOTBASE="$GITHUB_WORKSPACE/RIOT"
|
||||
@ -168,6 +182,27 @@ jobs:
|
||||
mkdir test-reports/
|
||||
junit2html ${REPORT_XML} ${REPORT_NAME}.html
|
||||
cp ${REPORT_XML} ${REPORT_NAME}.xml
|
||||
- name: Generate result message
|
||||
if: always()
|
||||
id: generate_results
|
||||
run: |
|
||||
if [ "${{ steps.tests.conclusion }}" == "success" ]; then
|
||||
nice_str="✅ **PASSED**"
|
||||
elif [ "${{ steps.tests.conclusion }}" == "failure" ]; then
|
||||
nice_str="❌ **FAILED**"
|
||||
fi
|
||||
echo "nice_str=${nice_str}" >> ${GITHUB_OUTPUT}
|
||||
- name: Report to Matrix channel
|
||||
if: ${{ always() && steps.generate_results.outputs.nice_str != '' }}
|
||||
uses: s3krit/matrix-message-action@v0.0.3
|
||||
with:
|
||||
room_id: ${{ secrets.RIOT_CI_RELEASE_REPORT_CHANNEL }}
|
||||
access_token: ${{ secrets.MATRIX_RIOT_CI_ACCESS_TOKEN }}
|
||||
server: "matrix.org"
|
||||
message: >
|
||||
${{ steps.generate_results.outputs.nice_str}}: Release tests
|
||||
`[${{ join(matrix.*, ', ') }}]` on `${{ github.event_name }}`:
|
||||
${{ github.server_url }}/${{ github.repository }}/actions/runs/${{ github.run_id }}
|
||||
- uses: actions/upload-artifact@v2
|
||||
if: always()
|
||||
with:
|
||||
|
||||
22
.github/workflows/static-test.yml
vendored
22
.github/workflows/static-test.yml
vendored
@ -4,6 +4,8 @@ on:
|
||||
push:
|
||||
branches:
|
||||
- master
|
||||
- staging
|
||||
- trying
|
||||
tags:
|
||||
- '[0-9][0-9][0-9][0-9].[0-9][0-9]-RC[0-9]*'
|
||||
- '[0-9][0-9][0-9][0-9].[0-9][0-9]'
|
||||
@ -11,19 +13,27 @@ on:
|
||||
pull_request:
|
||||
branches:
|
||||
- '*'
|
||||
merge_group:
|
||||
|
||||
jobs:
|
||||
static-tests:
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: actions/checkout@v2
|
||||
- uses: actions/checkout@main
|
||||
with:
|
||||
fetch-depth: 0
|
||||
- name: set CI_BASE_BRANCH
|
||||
run: |
|
||||
if [ -n "${{ github.base_ref }}" ]; then
|
||||
echo "CI_BASE_BRANCH=${{ github.base_ref }}" >> $GITHUB_ENV
|
||||
elif [ -n "${{ github.event.merge_group.base_ref }}" ]; then
|
||||
echo "CI_BASE_BRANCH=${{ github.event.merge_group.base_ref }}" | sed s.=refs/heads/.=. >> $GITHUB_ENV
|
||||
fi
|
||||
- name: Setup git
|
||||
run: |
|
||||
# Note: ${{ github.base_ref }} is empty when not in a PR
|
||||
if [ -n "${{ github.base_ref }}" ]; then
|
||||
git fetch origin ${{ github.base_ref }}:${{ github.base_ref }} --no-tags
|
||||
# Note: CI_BASE_BRANCH is empty when not in a PR
|
||||
if [ -n "${CI_BASE_BRANCH}" ]; then
|
||||
git fetch origin ${CI_BASE_BRANCH}:${CI_BASE_BRANCH} --no-tags
|
||||
else
|
||||
git config diff.renameLimit 16384
|
||||
fi
|
||||
@ -32,9 +42,9 @@ jobs:
|
||||
run: docker pull riot/static-test-tools:latest
|
||||
- name: Run static-tests
|
||||
run: |
|
||||
# Note: ${{ github.base_ref }} is empty when not in a PR
|
||||
# Note: ${CI_BASE_BRANCH} is empty when not in a PR
|
||||
docker run --rm \
|
||||
-e CI_BASE_BRANCH=${{ github.base_ref }} \
|
||||
-e CI_BASE_BRANCH \
|
||||
-e GITHUB_RUN_ID=${GITHUB_RUN_ID} \
|
||||
-v $(pwd):/data/riotbuild \
|
||||
riot/static-test-tools:latest \
|
||||
|
||||
20
.github/workflows/test-on-iotlab.yml
vendored
20
.github/workflows/test-on-iotlab.yml
vendored
@ -36,15 +36,11 @@ jobs:
|
||||
- riot: dwm1001
|
||||
iotlab:
|
||||
archi: dwm1001:dw1000
|
||||
site: saclay
|
||||
site: toulouse
|
||||
- riot: iotlab-m3
|
||||
iotlab:
|
||||
archi: m3:at86rf231
|
||||
site: saclay
|
||||
- riot: nrf51dk
|
||||
iotlab:
|
||||
archi: nrf51dk:ble
|
||||
site: saclay
|
||||
- riot: nrf52dk
|
||||
iotlab:
|
||||
archi: nrf52dk:ble
|
||||
@ -53,10 +49,6 @@ jobs:
|
||||
iotlab:
|
||||
archi: nrf52840dk:multi
|
||||
site: saclay
|
||||
- riot: nrf52832-mdk
|
||||
iotlab:
|
||||
archi: nrf52832mdk:ble
|
||||
site: saclay
|
||||
- riot: nucleo-wl55jc
|
||||
iotlab:
|
||||
archi: nucleo-wl55jc:stm32wl
|
||||
@ -85,12 +77,12 @@ jobs:
|
||||
COMPILE_AND_TEST_FOR_BOARD: ./dist/tools/compile_and_test_for_board/compile_and_test_for_board.py
|
||||
COMPILE_AND_TEST_ARGS: --with-test-only --jobs=2 --report-xml
|
||||
# Exclude applications that are expected to fail or cannot run on iotlab
|
||||
# - tests/periph_timer_short_relative_set is expected to fail
|
||||
# - tests/periph/timer_short_relative_set is expected to fail
|
||||
# - tests/riotboot requires the riotboot feature and provides a test
|
||||
# but flashing at a specific offset is not (yet) supported on IoT-LAB
|
||||
# so it will always fail because of that limitation
|
||||
APPLICATIONS_EXCLUDE: tests/periph_timer_short_relative_set tests/riotboot
|
||||
# Increase tolerance error with `tests/periph_timer_periodic` because
|
||||
APPLICATIONS_EXCLUDE: tests/periph/timer_short_relative_set tests/riotboot
|
||||
# Increase tolerance error with `tests/periph/timer_periodic` because
|
||||
# of timing issues with the test script when running in the github
|
||||
# actions environment
|
||||
TEST_PERIPH_TIMER_PERIODIC_PRECISION: 0.30
|
||||
@ -102,7 +94,7 @@ jobs:
|
||||
- name: Install Python dependencies
|
||||
run: |
|
||||
python -m pip install --upgrade pip
|
||||
pip install iotlabcli pexpect riotctrl[rapidjson] junit-xml
|
||||
pip install iotlabcli pexpect riotctrl[rapidjson] junit-xml scapy
|
||||
- name: Configure credentials
|
||||
run: echo '${{ secrets.IOTLABRC }}' > ~/.iotlabrc
|
||||
- name: Setup SSH agent
|
||||
@ -118,7 +110,7 @@ jobs:
|
||||
run: |
|
||||
docker pull riot/riotbuild:latest
|
||||
- name: Checkout RIOT
|
||||
uses: actions/checkout@v2
|
||||
uses: actions/checkout@main
|
||||
with:
|
||||
ref: ${{ github.event.inputs.riot_version }}
|
||||
- name: Launch IoT-LAB experiment
|
||||
|
||||
105
.github/workflows/test-on-ryot.yml
vendored
105
.github/workflows/test-on-ryot.yml
vendored
@ -1,105 +0,0 @@
|
||||
---
|
||||
# Run 'compile_and_test_for_board.py' on connected boards.
|
||||
#
|
||||
# This workflow will run on a RYOT (Run Your Own Test) machine and launch
|
||||
# all tests on all boards currently connected to that machine. This
|
||||
# workflow relies on self-hosted runners, this means building and
|
||||
# flashing happens on the self-hosted runner (all in docker). An alternative
|
||||
# approach was used in https://github.com/RIOT-OS/RIOT/pull/14600, where
|
||||
# the RYOT machine was only used for remote flashing, this is a better
|
||||
# alternative if ssh access is possible.
|
||||
#
|
||||
# Documentation:
|
||||
#
|
||||
# * Setup a RYOT machine:
|
||||
# https://github.com/fjmolinas/riot-ryot/blob/master/setup.md
|
||||
#
|
||||
# * Requirements (already filled by a RYOT machine):
|
||||
# * Add one or more self-hosted runners:
|
||||
# https://docs.github.com/en/actions/hosting-your-own-runners/adding-self-hosted-runners
|
||||
# * All required flashing tools installed
|
||||
# * udev rules that map all BOARD to /dev/riot/tty-$(BOARD), see
|
||||
# http://riot-os.org/api/advanced-build-system-tricks.html#multiple-boards-udev
|
||||
# * RIOT_MAKEFILES_GLOBAL_PRE that sets PORT and DEBUG_ADAPTER_ID for each
|
||||
# BOARD
|
||||
# * A list of connected BOARDs in JSON format so that fromJSON can be used
|
||||
# to dynamically setup the matrix, e.g. make target providing this:
|
||||
# https://github.com/fjmolinas/riot-ryot/blob/72fc9ad710a2219e942c5965a014e934822e9da5/template/conf/makefiles.pre#L19-L24
|
||||
# * RYOT: https://github.com/fjmolinas/riot-ryot
|
||||
|
||||
name: test-on-ryot
|
||||
|
||||
on:
|
||||
# Schedule weekly runs Saturday at 00:00 on master
|
||||
schedule:
|
||||
- cron: '0 0 * * 6'
|
||||
push:
|
||||
# Run on all new release candidates
|
||||
tags:
|
||||
- '[0-9][0-9][0-9][0-9].[0-9][0-9]-RC[0-9]*'
|
||||
- '[0-9][0-9][0-9][0-9].[0-9][0-9]'
|
||||
- '[0-9][0-9][0-9][0-9].[0-9][0-9].*'
|
||||
env:
|
||||
# self-hosted runners are started by a systemd which is not a "login" shell
|
||||
# this means that no local environment variables are loaded (e.g. /etc/environment)
|
||||
# when the runner is started. So explicitly set RIOT_MAKEFILES_GLOBAL_PRE
|
||||
# to set PORT and DEBUG_ADAPTER_ID per BOARD
|
||||
RIOT_MAKEFILES_GLOBAL_PRE: '/builds/conf/makefiles.pre'
|
||||
|
||||
jobs:
|
||||
connected_boards:
|
||||
name: Get Connected Boards
|
||||
runs-on: self-hosted
|
||||
outputs:
|
||||
boards: ${{ steps.ci-connected-boards.outputs.boards }}
|
||||
steps:
|
||||
# Get all currently connected boards if not passed through an input
|
||||
- id: ci-connected-boards
|
||||
run: echo "::set-output name=boards::$(make -C /builds/boards/ list-boards-json --no-print-directory)"
|
||||
|
||||
# Runs all tests on connected boards
|
||||
compile_and_test_for_board:
|
||||
name: ${{ matrix.board }}
|
||||
runs-on: self-hosted
|
||||
needs: connected_boards
|
||||
# ci-riot-tribe has 8 cores, parallelism will depend on actually configured
|
||||
# runners
|
||||
strategy:
|
||||
max-parallel: 7
|
||||
fail-fast: false
|
||||
matrix:
|
||||
board: ${{ fromJson(needs.connected_boards.outputs.boards) }}
|
||||
env:
|
||||
BUILD_IN_DOCKER: 1
|
||||
COMPILE_AND_TEST_FOR_BOARD: /builds/boards/RIOT/dist/tools/compile_and_test_for_board/compile_and_test_for_board.py
|
||||
# args for compile_and_test_for_board script
|
||||
COMPILE_AND_TEST_ARGS: --with-test-only --report-xml --incremental
|
||||
# environment vars for compile_and_test_for_board script to pass
|
||||
# USEMODULE and CFLAGS use:
|
||||
# DOCKER_ENVIRONMENT_CMDLINE=\'-e USEMODULE=<name>\'
|
||||
# DOCKER_ENVIRONMENT_CMDLINE=\'-e CFLAGS=-D<flag>\'
|
||||
COMPILE_AND_TEST_VARS: ''
|
||||
APPLICATIONS: ''
|
||||
# Exclude 'tests/periph_timer_short_relative_set' since its expected
|
||||
# to fail on most BOARDs
|
||||
APPLICATIONS_EXCLUDE: 'tests/periph_timer_short_relative_set'
|
||||
steps:
|
||||
- name: Checkout RIOT
|
||||
uses: actions/checkout@v2
|
||||
with:
|
||||
ref: ${{ github.event.inputs.riot_version }}
|
||||
# Make sure it runs git clean -xdff before fetching
|
||||
clean: true
|
||||
- name: Run compile_and_test_for_board.py
|
||||
run: |
|
||||
${COMPILE_AND_TEST_VARS} ${COMPILE_AND_TEST_FOR_BOARD} . \
|
||||
${{ matrix.board }} results-${{ matrix.board }} \
|
||||
${COMPILE_AND_TEST_ARGS} \
|
||||
--applications="${APPLICATIONS}" \
|
||||
--applications-exclude="${APPLICATIONS_EXCLUDE}"
|
||||
- name: Archive results
|
||||
if: always()
|
||||
uses: actions/upload-artifact@v2
|
||||
with:
|
||||
name: ${{ matrix.board }}
|
||||
path: results-${{ matrix.board }}
|
||||
115
.github/workflows/tools-buildtest.yml
vendored
115
.github/workflows/tools-buildtest.yml
vendored
@ -4,78 +4,67 @@ on:
|
||||
push:
|
||||
branches:
|
||||
- master
|
||||
- staging
|
||||
- trying
|
||||
tags:
|
||||
- '*'
|
||||
pull_request:
|
||||
branches:
|
||||
- '*'
|
||||
merge_group:
|
||||
|
||||
jobs:
|
||||
tools-build:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
max-parallel: 16
|
||||
matrix:
|
||||
tools: # List of tools sorted by name in alphabetical order
|
||||
- name: benchmark_udp
|
||||
path: dist/tools
|
||||
- name: bossa-1.8
|
||||
path: dist/tools
|
||||
- name: bossa-1.9
|
||||
path: dist/tools
|
||||
- name: bossa-nrf52
|
||||
path: dist/tools
|
||||
- name: calc_spi_scalers
|
||||
path: cpu/kinetis/dist
|
||||
- name: clk_conf
|
||||
path: cpu/stm32/dist
|
||||
- name: edbg
|
||||
path: dist/tools
|
||||
- name: ethos
|
||||
path: dist/tools
|
||||
- name: fixdep
|
||||
path: dist/tools
|
||||
- name: flatc
|
||||
path: dist/tools
|
||||
- name: lpc2k_pgm
|
||||
path: dist/tools
|
||||
- name: mosquitto_rsmb
|
||||
path: dist/tools
|
||||
- name: riotboot_serial
|
||||
path: dist/tools
|
||||
- name: setsid
|
||||
path: dist/tools
|
||||
- name: uhcpd
|
||||
path: dist/tools
|
||||
- name: zep_dispatch
|
||||
path: dist/tools
|
||||
steps:
|
||||
- uses: actions/checkout@master
|
||||
- name: Build flatc standalone
|
||||
uses: aabadie/riot-action@v1
|
||||
- uses: actions/checkout@main
|
||||
- name: Build ${{ matrix.tools.name }} in ${{ matrix.tools.path }}
|
||||
uses: aabadie/riot-action@main
|
||||
with:
|
||||
cmd: make -C dist/tools/flatc
|
||||
- name: Build mosquitto_rsmb standalone
|
||||
uses: aabadie/riot-action@v1
|
||||
cmd: make -C ${{ matrix.tools.path }}/${{ matrix.tools.name }}
|
||||
tools-build-success:
|
||||
if: always()
|
||||
needs: tools-build
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- name: tools-build succeeded
|
||||
uses: re-actors/alls-green@release/v1
|
||||
with:
|
||||
cmd: make -C dist/tools/mosquitto_rsmb
|
||||
- name: Build bossa-1.8 standalone
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/bossa-1.8
|
||||
- name: Build bossa-1.9 standalone
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/bossa-1.9
|
||||
- name: Build bossa-nrf52 standalone
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/bossa-nrf52
|
||||
- name: Build edbg standalone
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/edbg
|
||||
- name: Build pic32prog standalone
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/pic32prog
|
||||
- name: Build setsid standalone
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/setsid
|
||||
- name: Build ethos
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/ethos
|
||||
- name: Build uhcpd
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/uhcpd
|
||||
- name: Build stm32 clk_conf
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C cpu/stm32/dist/clk_conf
|
||||
- name: Build kinetis calc_spi_scalers
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C cpu/kinetis/dist/calc_spi_scalers
|
||||
- name: Build fixdep tool
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/fixdep
|
||||
- name: Build lpc2k_pgm tool
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/lpc2k_pgm
|
||||
- name: Build riotboot_serial tool
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/riotboot_serial
|
||||
- name: Build ZEP dispatcher & topology generator
|
||||
uses: aabadie/riot-action@v1
|
||||
with:
|
||||
cmd: make -C dist/tools/zep_dispatch
|
||||
jobs: ${{ toJSON(needs) }}
|
||||
|
||||
7
.github/workflows/tools-test.yml
vendored
7
.github/workflows/tools-test.yml
vendored
@ -9,12 +9,14 @@ on:
|
||||
pull_request:
|
||||
branches:
|
||||
- '*'
|
||||
merge_group:
|
||||
|
||||
jobs:
|
||||
python-tests:
|
||||
if: github.event_name != 'merge_group'
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: actions/checkout@master
|
||||
- uses: actions/checkout@main
|
||||
- name: Set up Python ${{ matrix.python-version }}
|
||||
uses: actions/setup-python@v1
|
||||
with:
|
||||
@ -24,6 +26,7 @@ jobs:
|
||||
python -m pip install --upgrade pip
|
||||
python -m pip install tox
|
||||
python -m pip install kconfiglib
|
||||
sudo apt-get update
|
||||
sudo apt-get install gcc-multilib
|
||||
- name: Test backport_pr
|
||||
run: cd dist/tools/backport_pr && tox
|
||||
@ -35,3 +38,5 @@ jobs:
|
||||
run: cd dist/pythonlibs/riotctrl_shell && tox
|
||||
- name: Test kconfig script
|
||||
run: cd dist/tools/kconfiglib/tests && ./test.sh
|
||||
- name: Test compile_like_murdock script
|
||||
run: cd dist/tools/compile_test/tests && ./test.sh
|
||||
|
||||
7
.gitignore
vendored
7
.gitignore
vendored
@ -37,7 +37,8 @@ cachegrind.out*
|
||||
# Codelite (among others) project files
|
||||
*.project
|
||||
# Visual Studio Code user settings
|
||||
.vscode/
|
||||
.vscode/*
|
||||
!.vscode/settings.json
|
||||
# ctags index files
|
||||
tags
|
||||
# GDB initialization scripts
|
||||
@ -93,3 +94,7 @@ keys/
|
||||
|
||||
# custom clang-tidy flags, also used when using clangd language server
|
||||
.clang-tidy
|
||||
|
||||
# Environments
|
||||
.venv
|
||||
venv/
|
||||
|
||||
1
.mailmap
1
.mailmap
@ -25,3 +25,4 @@ Peter Kietzmann <peter.kietzmann@haw-hamburg.de>
|
||||
René Kijewski <rene.kijewski@fu-berlin.de>
|
||||
René Kijewski <rene.kijewski@fu-berlin.de> <kijewski@mi.fu-berlin.de>
|
||||
Sebastian Meiling <s@mlng.net>
|
||||
Marian Buschsieweke <marian.buschsieweke@posteo.net> <marian.buschsieweke@ovgu.de>
|
||||
|
||||
383
.murdock
383
.murdock
@ -5,126 +5,43 @@
|
||||
# and / or
|
||||
#export APPS="examples/hello-world tests/unittests"
|
||||
|
||||
#
|
||||
: ${TEST_BOARDS_AVAILABLE:="esp32-wroom-32 samr21-xpro"}
|
||||
QUICKBUILD_BOARDS="
|
||||
adafruit-itsybitsy-m4
|
||||
atmega256rfr2-xpro
|
||||
esp32-wroom-32
|
||||
esp32s3-devkit
|
||||
frdm-k64f
|
||||
hifive1b
|
||||
msb-430
|
||||
msba2
|
||||
native
|
||||
native64
|
||||
nrf52840dk
|
||||
qn9080dk
|
||||
samr21-xpro
|
||||
stk3200
|
||||
stm32f429i-disc1"
|
||||
|
||||
# this configures boards that are available via pifleet
|
||||
case "${CI_MURDOCK_PROJECT}" in
|
||||
riot)
|
||||
: ${TEST_BOARDS_AVAILABLE:="esp32-wroom-32 samr21-xpro"}
|
||||
;;
|
||||
riot-staging)
|
||||
: ${TEST_BOARDS_AVAILABLE:=""}
|
||||
;;
|
||||
*)
|
||||
: ${TEST_BOARDS_AVAILABLE:=""}
|
||||
;;
|
||||
esac
|
||||
|
||||
#: ${EMULATED_BOARDS_AVAILABLE:="microbit"}
|
||||
|
||||
# temporarily disabling llvm builds until https://github.com/RIOT-OS/RIOT/pull/15595
|
||||
# is in
|
||||
#: ${TEST_BOARDS_LLVM_COMPILE:="iotlab-m3 native nrf52dk mulle nucleo-f401re samr21-xpro slstk3402a"}
|
||||
: ${TEST_BOARDS_LLVM_COMPILE:=""}
|
||||
: ${TEST_BOARDS_LLVM_COMPILE:="iotlab-m3 native native64 nrf52dk mulle nucleo-f401re samr21-xpro slstk3402a"}
|
||||
|
||||
: ${TEST_KCONFIG_BOARDS_AVAILABLE:="
|
||||
adafruit-itsybitsy-m4
|
||||
arduino-due
|
||||
arduino-leonardo
|
||||
arduino-mkrzero
|
||||
arduino-mega2560
|
||||
arduino-nano
|
||||
atxmega-a1-xplained
|
||||
atxmega-a3bu-xplained
|
||||
avr-rss2
|
||||
avsextrem
|
||||
bastwan
|
||||
bluepill
|
||||
b-l475e-iot01a
|
||||
cc1352-launchpad
|
||||
cc2650-launchpad
|
||||
derfmega128
|
||||
dwm1001
|
||||
esp32-ci
|
||||
esp32-heltec-lora32-v2
|
||||
esp8266-ci
|
||||
esp8266-esp-12x
|
||||
hamilton
|
||||
hifive1
|
||||
mbed_lpc1768
|
||||
mega-xplained
|
||||
microbit
|
||||
mulle
|
||||
native
|
||||
nrf52840dk
|
||||
nrf9160dk
|
||||
nucleo-f072rb
|
||||
nucleo-f103rb
|
||||
nucleo-f207zg
|
||||
nucleo-f334r8
|
||||
nucleo-f429zi
|
||||
nucleo-f767zi
|
||||
nucleo-g071rb
|
||||
nucleo-g474re
|
||||
nucleo-l011k4
|
||||
nucleo-l073rz
|
||||
nucleo-l152re
|
||||
nucleo-l433rc
|
||||
nucleo-l552ze-q
|
||||
p-nucleo-wb55
|
||||
qn9080dk
|
||||
remote-revb
|
||||
same54-xpro
|
||||
samr21-xpro
|
||||
seeedstudio-gd32
|
||||
slstk3400a
|
||||
sltb001a
|
||||
slwstk6220a
|
||||
stm32f723e-disco
|
||||
stm32mp157c-dk2
|
||||
waspmote-pro
|
||||
weact-f401ce
|
||||
z1
|
||||
"}
|
||||
|
||||
: ${TEST_KCONFIG_ENFORCE_APP_GROUPS:="
|
||||
tests/cb_mux*
|
||||
tests/congure_*
|
||||
tests/driver_b*
|
||||
tests/driver_f*
|
||||
tests/driver_g*
|
||||
tests/driver_h*
|
||||
tests/driver_i*
|
||||
tests/driver_j*
|
||||
tests/driver_l*
|
||||
tests/driver_o*
|
||||
tests/driver_p*
|
||||
tests/driver_q*
|
||||
tests/driver_r*
|
||||
tests/driver_s*
|
||||
tests/driver_t*
|
||||
tests/driver_u*
|
||||
tests/driver_v*
|
||||
tests/external_board_dirs
|
||||
tests/periph_*
|
||||
tests/pkg_elk
|
||||
tests/pkg_uzlib
|
||||
tests/prng_*
|
||||
tests/trace
|
||||
tests/xtimer_*
|
||||
tests/ztimer_*
|
||||
examples/hello-world
|
||||
tests/ieee802154_hal
|
||||
"}
|
||||
|
||||
# This list prevents boards from being tested by the TEST_KCONFIG_TEST_ALLOWLIST
|
||||
# This should only be used for boards that require a lot of work, such as,
|
||||
# requiring modelling of a clock tree.
|
||||
# As a rule of thumb, only add boards here if there are not differences in
|
||||
# modules or packages.
|
||||
# Eventually this list will be removed...
|
||||
#
|
||||
: ${TEST_KCONFIG_BOARD_BLOCKLIST:="
|
||||
6lowpan-clicker
|
||||
pic32-wifire
|
||||
"}
|
||||
|
||||
# This list will force all boards that are not in the TEST_KCONFIG_BOARD_BLOCKLIST
|
||||
# to be tested on the apps. The purpose is to prevent new boards from skipping
|
||||
# the kconfig implementations.
|
||||
: ${TEST_KCONFIG_TEST_ALLOWLIST:="
|
||||
examples/hello-world
|
||||
tests/saul
|
||||
tests/mtd_mapper
|
||||
"}
|
||||
|
||||
: ${TEST_WITH_CONFIG_SUPPORTED:="examples/suit_update tests/driver_at86rf2xx_aes"}
|
||||
: ${TEST_WITH_CONFIG_SUPPORTED:="examples/suit_update tests/drivers/at86rf2xx_aes"}
|
||||
|
||||
export RIOT_CI_BUILD=1
|
||||
export CC_NOCOLOR=1
|
||||
@ -133,9 +50,60 @@ export CFLAGS_DBG=""
|
||||
export DLCACHE_DIR=${DLCACHE_DIR:-~/.dlcache}
|
||||
export ENABLE_TEST_CACHE=${ENABLE_TEST_CACHE:-1}
|
||||
export MURDOCK_REDIS_HOST=${MURDOCK_REDIS_HOST:-127.0.0.1}
|
||||
|
||||
NIGHTLY=${NIGHTLY:-0}
|
||||
RUN_TESTS=${RUN_TESTS:-${NIGHTLY}}
|
||||
FULL_BUILD=${FULL_BUILD:-${NIGHTLY}}
|
||||
|
||||
check_label() {
|
||||
local label="${1}"
|
||||
[ -z "${CI_PULL_LABELS}" ] && return 1
|
||||
echo "${CI_PULL_LABELS}" | grep -q "${label}"
|
||||
return $?
|
||||
}
|
||||
|
||||
# true if "$2" starts with "$1", false otherwise
|
||||
startswith() {
|
||||
case "${2}" in
|
||||
${1}*) true ;;
|
||||
*) false ;;
|
||||
esac
|
||||
}
|
||||
|
||||
# this function returns 0 when this build is building a merge queue branch.
|
||||
is_merge_queue_build() {
|
||||
startswith "gh-readonly-queue/" "${CI_BUILD_BRANCH}"
|
||||
}
|
||||
|
||||
# fullbuild logic
|
||||
# non-full-builds are those where can_fast_ci_run might reduce the build
|
||||
# automatically
|
||||
if [ -z "${FULL_BUILD}" ]; then
|
||||
if [ "${NIGHTLY}" = 1 ]; then
|
||||
FULL_BUILD=1
|
||||
elif check_label "CI: full build"; then
|
||||
# full build if requested by label
|
||||
FULL_BUILD=1
|
||||
else
|
||||
FULL_BUILD=0
|
||||
fi
|
||||
export FULL_BUILD
|
||||
fi
|
||||
|
||||
|
||||
# quickbuild logic
|
||||
# a "quickbuild" is only building a representative subset of all build
|
||||
# configurations.
|
||||
if [ -z "${QUICK_BUILD}" ]; then
|
||||
export QUICK_BUILD=0
|
||||
if is_merge_queue_build; then
|
||||
# always do full build for merge queue' branches
|
||||
true
|
||||
elif [ ${FULL_BUILD} -eq 1 ]; then
|
||||
# full build if building nightly or full build requested by label
|
||||
true
|
||||
else
|
||||
export QUICK_BUILD=1
|
||||
fi
|
||||
fi
|
||||
|
||||
# This is a work around for a bug in CCACHE which interacts very badly with
|
||||
# some features of RIOT and of murdock. The result is that ccache is
|
||||
@ -156,7 +124,8 @@ export OPTIONAL_CFLAGS_BLACKLIST="-gz"
|
||||
|
||||
DWQ_ENV="-E BOARDS -E APPS -E NIGHTLY -E RUN_TESTS -E ENABLE_TEST_CACHE
|
||||
-E TEST_HASH -E CI_PULL_LABELS -ECI_BASE_BRANCH -ECI_BASE_COMMIT
|
||||
-EPKG_USE_MIRROR -EAPPS_CHANGED -EBOARDS_CHANGED -ESTATIC_TESTS"
|
||||
-EPKG_USE_MIRROR -EAPPS_CHANGED -EBOARDS_CHANGED -ESTATIC_TESTS
|
||||
-E CI_MURDOCK_PROJECT -EFULL_BUILD -EQUICK_BUILD"
|
||||
|
||||
if [ ${NIGHTLY} -eq 1 ]; then
|
||||
export PKG_USE_MIRROR=0
|
||||
@ -164,64 +133,16 @@ fi
|
||||
|
||||
CFCR_ARGS="--upstreambranch ${CI_BASE_COMMIT}"
|
||||
|
||||
get_supported_kconfig_board_app() {
|
||||
local board=$1
|
||||
local appdir=$2
|
||||
if is_in_list "${board}" "${TEST_KCONFIG_BOARD_BLOCKLIST}"; then
|
||||
return 1
|
||||
# if RUN_TESTS is unset (e.g., not passed from the outside),
|
||||
# set to 1 if NIGHTLY=1 or if the label "CI: run tests" is set,
|
||||
# otherwise set 0.
|
||||
if [ -z "$RUN_TESTS" ]; then
|
||||
if [ "$NIGHTLY" = "1" ] || check_label "CI: run tests" ; then
|
||||
RUN_TESTS=1
|
||||
else
|
||||
RUN_TESTS=0
|
||||
fi
|
||||
|
||||
# On nightlies run all possible kconfig tests on all boards
|
||||
# Normally we don't want to do this as it adds quite a bit to build time
|
||||
# and the subset of boards we are testing for are pretty good at catching
|
||||
# any bugs...
|
||||
# This will be over one day, I promise.
|
||||
if [ ${NIGHTLY} -eq 1 ]; then
|
||||
if is_in_list "${appdir}" "${TEST_KCONFIG_ENFORCE_APP_GROUPS}"; then
|
||||
return 0
|
||||
fi
|
||||
if [ -f "${appdir}/app.config.test" ]; then
|
||||
return 0
|
||||
fi
|
||||
fi
|
||||
if is_in_list "${appdir}" "${TEST_KCONFIG_TEST_ALLOWLIST}"; then
|
||||
return 0
|
||||
fi
|
||||
if is_in_list "${board}" "${TEST_KCONFIG_BOARDS_AVAILABLE}"; then
|
||||
if is_in_list "${appdir}" "${TEST_KCONFIG_ENFORCE_APP_GROUPS}"; then
|
||||
return 0
|
||||
fi
|
||||
if [ -f "${appdir}/app.config.test" ]; then
|
||||
return 0
|
||||
fi
|
||||
fi
|
||||
return 1
|
||||
}
|
||||
|
||||
kconfig_module_packages_diff() {
|
||||
local board=$1
|
||||
local appdir=$2
|
||||
|
||||
make clean --no-print-directory -C ${appdir} BOARD=${board}
|
||||
mmp=$(make --no-print-directory info-modules info-packages -C ${appdir} BOARD=${board})
|
||||
|
||||
make clean --no-print-directory -C ${appdir} BOARD=${board}
|
||||
kmp=$(TEST_KCONFIG=1 make --no-print-directory info-modules info-packages -C ${appdir} BOARD=${board})
|
||||
|
||||
|
||||
bash -c "diff <(echo \"${mmp}\") <(echo \"${kmp}\")"
|
||||
}
|
||||
|
||||
check_label() {
|
||||
local label="${1}"
|
||||
[ -z "${CI_PULL_LABELS}" ] && return 1
|
||||
echo "${CI_PULL_LABELS}" | grep -q "${label}"
|
||||
return $?
|
||||
}
|
||||
|
||||
[ "$RUN_TESTS" != "1" ] && {
|
||||
check_label "CI: run tests" && RUN_TESTS=1
|
||||
}
|
||||
fi
|
||||
|
||||
[ "$ENABLE_TEST_CACHE" = "1" ] && {
|
||||
check_label "CI: disable test cache" && export ENABLE_TEST_CACHE=0
|
||||
@ -232,14 +153,6 @@ error() {
|
||||
exit 1
|
||||
}
|
||||
|
||||
# true if "$2" starts with "$1", false otherwise
|
||||
startswith() {
|
||||
case "${2}" in
|
||||
${1}*) true ;;
|
||||
*) false ;;
|
||||
esac
|
||||
}
|
||||
|
||||
# if MURDOCK_HOOK is set, this function will execute it and pass on all it's
|
||||
# parameters. should the hook script exit with negative exit code, hook() makes
|
||||
# this script exit with error, too.
|
||||
@ -318,9 +231,14 @@ get_supported_boards() {
|
||||
fi
|
||||
fi
|
||||
|
||||
BOARDS_=${BOARDS}
|
||||
if [ $only_changed -eq 1 ]; then
|
||||
BOARDS_=${BOARDS}
|
||||
# if can_fast_ci_run figured out changes to specific boards,
|
||||
# only consider those
|
||||
export BOARDS="$BOARDS_CHANGED"
|
||||
elif [ -z "${BOARDS}" -a ${QUICK_BUILD} -eq 1 ]; then
|
||||
# quickbuild board filter is applied here
|
||||
export BOARDS="${QUICKBUILD_BOARDS}"
|
||||
fi
|
||||
|
||||
local boards="$(make --no-print-directory -C$appdir info-boards-supported 2>/dev/null || echo broken)"
|
||||
@ -362,7 +280,7 @@ get_app_board_toolchain_pairs() {
|
||||
local prefix="$*"
|
||||
|
||||
if [ "$boards" = makefile_broken ]; then
|
||||
echo "$appdir makefile_broken"
|
||||
echo "$0 error \"error: ${DWQ_WORKER}: get_supported_boards failed in $appdir\""
|
||||
return
|
||||
fi
|
||||
|
||||
@ -442,50 +360,44 @@ compile() {
|
||||
[ $# -ne 2 ] && error "$0: compile: invalid parameters (expected \$appdir \$board:\$toolchain)"
|
||||
[ ! -d "$appdir" ] && error "$0: compile: error: application directory \"$appdir\" doesn't exist"
|
||||
|
||||
# We compile a first time with Kconfig based dependency
|
||||
# resolution for regression purposes. $TEST_KCONFIG contains a
|
||||
# list of board-application tuples that are currently modeled to
|
||||
# run with Kconfig
|
||||
# use our checkout as ccache temporary folder.
|
||||
# On CI, this is a tmpfs, so using that instead of the `/cache/.ccache` volume
|
||||
# reduces disk IO.
|
||||
export CCACHE_TEMPDIR="$(pwd)/.ccache/tmp"
|
||||
|
||||
should_check_kconfig_hash=0
|
||||
|
||||
if get_supported_kconfig_board_app "${board}" "${appdir}"; then
|
||||
should_check_kconfig_hash=1
|
||||
BOARD=${board} make -C${appdir} clean
|
||||
CCACHE_BASEDIR="$(pwd)" BOARD=${board} TOOLCHAIN=${toolchain} RIOT_CI_BUILD=1 TEST_KCONFIG=1 \
|
||||
make -C${appdir} all test-input-hash -j${JOBS:-4}
|
||||
RES=$?
|
||||
if [ $RES -eq 0 ]; then
|
||||
kconfig_test_hash=$(test_hash_calc "${BINDIR}")
|
||||
else
|
||||
kconfig_test_hash=0
|
||||
echo "An error occurred while compiling using Kconfig";
|
||||
fi
|
||||
fi
|
||||
|
||||
# compile without Kconfig
|
||||
BOARD=${board} make -C${appdir} clean
|
||||
CCACHE_BASEDIR="$(pwd)" BOARD=$board TOOLCHAIN=$toolchain RIOT_CI_BUILD=1 \
|
||||
make -C${appdir} clean all test-input-hash -j${JOBS:-4}
|
||||
make -C${appdir} all test-input-hash -j${JOBS:-4}
|
||||
RES=$?
|
||||
|
||||
# test hash is used to cache test results
|
||||
test_hash=$(test_hash_calc "$BINDIR")
|
||||
|
||||
if [ ${should_check_kconfig_hash} != 0 ]; then
|
||||
if [ ${kconfig_test_hash} != ${test_hash} ]; then
|
||||
echo "Hashes of binaries with and without Kconfig mismatch for ${appdir} with ${board}";
|
||||
echo "Please check that all used modules are modelled in Kconfig and enabled";
|
||||
kconfig_module_packages_diff ${board} ${appdir}
|
||||
RES=1
|
||||
fi
|
||||
fi
|
||||
|
||||
# run tests
|
||||
if [ $RES -eq 0 ]; then
|
||||
if [ $RUN_TESTS -eq 1 -o "$board" = "native" ]; then
|
||||
if is_in_list "$board" "$EMULATED_BOARDS_AVAILABLE"; then
|
||||
EMULATED=1
|
||||
else
|
||||
EMULATED=0
|
||||
fi
|
||||
|
||||
if [ $RUN_TESTS -eq 1 -o "$board" = "native" -o "$board" = "native64" -o "$EMULATED" = "1" ]; then
|
||||
if [ -f "${BINDIR}/.test" ]; then
|
||||
if [ "$board" = "native" ]; then
|
||||
BOARD=$board make -C${appdir} test
|
||||
RES=$?
|
||||
if [ "$board" = "native" -o "$board" = "native64" -o "${EMULATED}" = "1" ]; then
|
||||
# For native, we can run the test on the worker that also
|
||||
# compiled it (`make -C${appdir} test`).
|
||||
# "dwq-localjob" allows using some (locally run) command's
|
||||
# output as if it was its own CI job.
|
||||
# We use this here so the output shows up in the Murdock UI
|
||||
# under the "Tests" tab and not inlined with the "Build"
|
||||
# output.
|
||||
# "--command-override" is a hack that makes the job fake the
|
||||
# command. This is currently needed for the Murdock UI to
|
||||
# properly categorize the job result.
|
||||
EMULATE=${EMULATED} BOARD=$board TOOLCHAIN=$toolchain \
|
||||
dwq-localjob \
|
||||
--command-override "./.murdock run_test ${appdir} ${board}:${toolchain}" \
|
||||
-- make -C${appdir} test
|
||||
elif is_in_list "$board" "$TEST_BOARDS_AVAILABLE"; then
|
||||
echo "-- test_hash=$test_hash"
|
||||
if test_cache_get $test_hash; then
|
||||
@ -500,10 +412,10 @@ compile() {
|
||||
fi
|
||||
fi
|
||||
|
||||
# log some build stats
|
||||
if [ -d ${BINDIR} ]
|
||||
then
|
||||
echo "-- build directory size: $(du -sh ${BINDIR} | cut -f1)"
|
||||
|
||||
echo "{\"build/\": $(du -s ${BINDIR} | cut -f1)}"
|
||||
# cleanup
|
||||
rm -rf ${BINDIR}
|
||||
fi
|
||||
@ -516,24 +428,23 @@ test_job() {
|
||||
local board=$(echo $2 | cut -f 1 -d':')
|
||||
local toolchain=$(echo $2 | cut -f 2 -d':')
|
||||
|
||||
# this points to the dwq checkout root folder
|
||||
local basedir="$(pwd)"
|
||||
|
||||
# interpret any extra arguments as file names.
|
||||
# They will be sent along with the job to the test worker
|
||||
# and stored in the application's binary folder.
|
||||
shift 2
|
||||
local files=""
|
||||
for filename in "$@"; do
|
||||
# check if the file is within $(BINDIR)
|
||||
if startswith "${BINDIR}" "${filename}"; then
|
||||
# get relative (to $(BINDIR) path
|
||||
local relpath="$(realpath --relative-to ${BINDIR} ${filename})"
|
||||
# check if the file is within $(basedir)
|
||||
if startswith "${basedir}" "${filename}"; then
|
||||
filename="$(realpath --relative-to ${basedir} ${filename})"
|
||||
else
|
||||
error "$0: error: extra test files not within \${BINDIR}!"
|
||||
error "$0: error: extra test files not within \${basedir}!"
|
||||
fi
|
||||
|
||||
# set remote file path.
|
||||
# currently, the test workers build in the default build path.
|
||||
local remote_bindir="${appdir}/bin/${board}"
|
||||
files="${files} --file ${filename}:${remote_bindir}/${relpath}"
|
||||
files="${files} --file ${filename}"
|
||||
done
|
||||
|
||||
dwqc \
|
||||
@ -549,12 +460,20 @@ run_test() {
|
||||
local appdir=$1
|
||||
local board=$(echo $2 | cut -f 1 -d':')
|
||||
local toolchain=$(echo $2 | cut -f 2 -d':')
|
||||
|
||||
# set build directory to match the builder
|
||||
export BINDIR="$(pwd)/build"
|
||||
|
||||
print_worker
|
||||
echo "-- executing tests for $appdir on $board (compiled with $toolchain toolchain):"
|
||||
hook run_test_pre
|
||||
|
||||
# do flashing and building of termdeps simultaneously
|
||||
BOARD=$board TOOLCHAIN=${toolchain} make -C$appdir flash-only termdeps -j2
|
||||
RES=$?
|
||||
if [ $RES -ne 0 ]; then
|
||||
error "- flashing failed!"
|
||||
fi
|
||||
|
||||
# now run the actual test
|
||||
if is_in_list "${appdir}" "${TEST_WITH_CONFIG_SUPPORTED}"; then
|
||||
|
||||
21
.murdock.yml
Normal file
21
.murdock.yml
Normal file
@ -0,0 +1,21 @@
|
||||
push:
|
||||
branches:
|
||||
# these two enable potential bors support:
|
||||
- '^staging$'
|
||||
- '^trying$'
|
||||
# github merge trains:
|
||||
- '^gh-readonly-queue/'
|
||||
|
||||
pr:
|
||||
enable_comments: true
|
||||
sticky_comment: true
|
||||
comment_artifacts:
|
||||
- name: doc-preview/
|
||||
readable_name: Documentation preview
|
||||
|
||||
commit:
|
||||
skip_keywords: ["ci_skip", "murdock_skip", "[ci skip]" ]
|
||||
|
||||
artifacts:
|
||||
- output.txt
|
||||
- doc-preview/
|
||||
11
.vscode/c_cpp_properties.json
vendored
Normal file
11
.vscode/c_cpp_properties.json
vendored
Normal file
@ -0,0 +1,11 @@
|
||||
{
|
||||
"configurations": [
|
||||
{
|
||||
"name": "RIOT",
|
||||
"cStandard": "c11",
|
||||
"cppStandard": "c++17",
|
||||
"compileCommands": "${workspaceFolder}/compile_commands.json"
|
||||
}
|
||||
],
|
||||
"version": 4
|
||||
}
|
||||
20
.vscode/settings.json
vendored
Normal file
20
.vscode/settings.json
vendored
Normal file
@ -0,0 +1,20 @@
|
||||
{
|
||||
"editor.rulers": [
|
||||
80,
|
||||
100
|
||||
],
|
||||
"editor.detectIndentation": false,
|
||||
"files.insertFinalNewline": true,
|
||||
"files.associations": {
|
||||
"Makefile.*": "makefile",
|
||||
"*.mk": "makefile"
|
||||
},
|
||||
"[shellscript][c][cpp]": {
|
||||
"editor.tabSize": 4,
|
||||
"editor.insertSpaces": true,
|
||||
},
|
||||
"[makefile]": {
|
||||
"editor.tabSize": 2,
|
||||
"editor.insertSpaces": true,
|
||||
},
|
||||
}
|
||||
58
CODEOWNERS
58
CODEOWNERS
@ -11,18 +11,18 @@
|
||||
|
||||
/boards/common/atxmega/ @nandojve
|
||||
/boards/common/esp*/ @gschorcht
|
||||
/boards/common/nrf*/ @aabadie @haukepetersen
|
||||
/boards/common/nrf*/ @aabadie
|
||||
/boards/common/nucleo*/ @aabadie
|
||||
/boards/common/silabs/ @basilfx
|
||||
/boards/common/slwstk6000b/ @basilfx
|
||||
/boards/common/stm32/ @aabadie @fjmolinas
|
||||
/boards/common/stm32/ @aabadie
|
||||
/boards/e180-zg120b-tb/ @basilfx
|
||||
/boards/esp*/ @gschorcht @yegorich
|
||||
/boards/hamilton/ @Hyungsin
|
||||
/boards/ikea-tradfri/ @basilfx
|
||||
/boards/lobaro-lorabox/ @leandrolanzieri
|
||||
/boards/nrf*/ @aabadie @haukepetersen
|
||||
/boards/nucleo*/ @aabadie @fjmolinas
|
||||
/boards/nrf*/ @aabadie
|
||||
/boards/nucleo*/ @aabadie
|
||||
/boards/phynode-kw41z/ @jia200x
|
||||
/boards/sam*-xpro/ @dylad
|
||||
/boards/same54-xpro/ @benpicco
|
||||
@ -43,26 +43,20 @@
|
||||
/cpu/avr8_common/ @kYc0o @maribu @nandojve
|
||||
/cpu/atmega*/ @kYc0o @maribu
|
||||
/cpu/atxmega/ @nandojve
|
||||
/cpu/cc2538/ @hexluthor @smlng @fjmolinas
|
||||
/cpu/cc26x0/ @hexluthor @smlng
|
||||
/cpu/cc26x2_cc13x2/ @hexluthor @smlng
|
||||
/cpu/cc26xx_cc13xx/ @hexluthor @smlng
|
||||
/cpu/cortexm_common/ @kaspar030 @bergzand
|
||||
/cpu/efm32/ @basilfx
|
||||
/cpu/esp*/ @gschorcht
|
||||
/cpu/fe310/ @aabadie @kaspar030 @bergzand
|
||||
/cpu/kinetis/ @fjmolinas
|
||||
/cpu/lpc2387/ @benpicco @maribu
|
||||
/cpu/mips*/ @kaspar030 @francois-berder
|
||||
/cpu/msp430*/ @kaspar030 @gschorcht
|
||||
/cpu/nrf*/ @aabadie @haukepetersen
|
||||
/cpu/nrf52/radio/nrf802154/ @bergzand @SemjonKerner @jia200x
|
||||
/cpu/nrf*/ @aabadie
|
||||
/cpu/nrf52/radio/nrf802154/ @bergzand @jia200x
|
||||
/cpu/sam0_common/ @benpicco @dylad @keestux
|
||||
/cpu/samd21/ @dylad @biboc
|
||||
/cpu/samd5x/ @benpicco @dylad
|
||||
/cpu/saml1x/ @dylad
|
||||
/cpu/saml21/ @dylad
|
||||
/cpu/stm32*/ @aabadie @fjmolinas @DipSwitch @vincent-d
|
||||
/cpu/stm32*/ @aabadie @vincent-d
|
||||
/cpu/stm32/periph/eth* @maribu
|
||||
/cpu/stm32/periph/ptp.c @maribu
|
||||
|
||||
@ -74,13 +68,12 @@
|
||||
/drivers/ad7746/ @leandrolanzieri
|
||||
/drivers/at24mac/ @benpicco
|
||||
/drivers/at86rf215/ @benpicco
|
||||
/drivers/at86rf2xx/ @daniel-k @Hyungsin @jia200x @smlng @miri64
|
||||
/drivers/at86rf2xx/ @daniel-k @Hyungsin @jia200x @miri64
|
||||
/drivers/bh1900nux/ @wosym
|
||||
/drivers/bq2429x/ @jeandudey
|
||||
/drivers/cc110x/ @maribu
|
||||
/drivers/cc1xxx_common/ @maribu
|
||||
/drivers/ccs811/ @gschorcht
|
||||
/drivers/enc28j60/ @haukepetersen
|
||||
/drivers/dcf77/ @daexel
|
||||
/drivers/dht/ @wosym
|
||||
/drivers/dose/ @jue89
|
||||
@ -94,12 +87,13 @@
|
||||
/drivers/slipdev/ @miri64
|
||||
/drivers/sx127x/ @aabadie @jia200x
|
||||
/drivers/ws281x/ @maribu
|
||||
/drivers/xbee/ @haukepetersen @miri64
|
||||
/drivers/xbee/ @miri64
|
||||
/drivers/include/periph/ @MrKevinWeiss
|
||||
/drivers/periph_common/ @MrKevinWeiss
|
||||
/drivers/include/periph/ptp.h @maribu
|
||||
|
||||
/pkg/cryptoauthlib/ @Einhornhool @PeterKietzmann
|
||||
/pkg/libschc/ @bartmoons @miri64
|
||||
/pkg/lua/ @jcarrano
|
||||
/pkg/lwip/ @miri64
|
||||
/pkg/gecko_sdk/ @basilfx
|
||||
@ -108,6 +102,7 @@
|
||||
/pkg/openthread/ @Hyungsin @jia200x
|
||||
/pkg/semtech-loramac/ @aabadie @jia200x
|
||||
/pkg/tinydtls/ @rfuentess @leandrolanzieri
|
||||
/pkg/tinyvcdiff/ @jue89
|
||||
/pkg/u8g2/ @basilfx
|
||||
/pkg/ucglib/ @basilfx
|
||||
/pkg/wakaama/ @leandrolanzieri
|
||||
@ -116,8 +111,8 @@
|
||||
/sys/event/ @kaspar030
|
||||
/sys/evtimer/ @kaspar030
|
||||
/sys/fmt/ @kaspar030
|
||||
/sys/net/application_layer/gcoap/ @haukepetersen @kb2ma @chrysn
|
||||
/sys/net/application_layer/nanocoap/ @kaspar030 @haukepetersen @kb2ma @chrysn
|
||||
/sys/net/application_layer/gcoap/ @chrysn
|
||||
/sys/net/application_layer/nanocoap/ @kaspar030 @chrysn
|
||||
/sys/include/net/sock* @maribu
|
||||
/sys/net/netif/ @miri64 @jia200x
|
||||
/sys/net/gnrc/network_layer/ @miri64
|
||||
@ -125,12 +120,12 @@
|
||||
/sys/net/gnrc/transport_layer/udp/ @miri64
|
||||
/sys/net/gnrc/link_layer/lorawan/ @jia200x
|
||||
/sys/net/gnrc/netif/ @miri64 @jia200x
|
||||
/sys/net/gnrc/routing/rpl/ @cgundogan @emmanuelsearch
|
||||
/sys/net/ @miri64 @haukepetersen @PeterKietzmann @cgundogan
|
||||
/sys/net/gnrc/routing/rpl/ @emmanuelsearch
|
||||
/sys/net/ @miri64 @PeterKietzmann
|
||||
/sys/pm_layered/ @kaspar030
|
||||
/sys/random/fortuna/ @basilfx
|
||||
/sys/riotboot/ @kaspar030 @fjmolinas
|
||||
/sys/suit @kaspar030 @fjmolinas @bergzand
|
||||
/sys/riotboot/ @kaspar030
|
||||
/sys/suit @kaspar030 @bergzand
|
||||
/sys/tsrb/ @kaspar030
|
||||
/sys/usb/ @bergzand @dylad @aabadie
|
||||
/sys/xtimer/ @kaspar030 @MichelRottleuthner
|
||||
@ -139,17 +134,18 @@
|
||||
/sys/include/ztimer/ @kaspar030 @bergzand
|
||||
/sys/ztimer/ @kaspar030 @bergzand
|
||||
|
||||
/tests/ @smlng @leandrolanzieri @aabadie @MichelRottleuthner @fjmolinas
|
||||
/tests/candev/ @wosym
|
||||
/tests/driver_bq2429x/ @jeandudey
|
||||
/tests/driver_dht/ @wosym
|
||||
/tests/gnrc* @miri64
|
||||
/tests/lwip* @miri64
|
||||
/tests/slip/ @miri64
|
||||
/tests/ @leandrolanzieri @aabadie @MichelRottleuthner
|
||||
/tests/drivers/candev/ @wosym
|
||||
/tests/drivers/bq2429x/ @jeandudey
|
||||
/tests/drivers/dht/ @wosym
|
||||
/tests/net/gnrc* @miri64
|
||||
/tests/pkg/lwip* @miri64
|
||||
/tests/pkg/libschc/ @miri64
|
||||
/tests/net/slip/ @miri64
|
||||
/tests/unittests @miri64
|
||||
/tests/*/tests/*.py @miri64
|
||||
/tests/cpu_efm32_features/ @basilfx
|
||||
/tests/cpu/efm32_features/ @basilfx
|
||||
|
||||
# KConfig maintainers will be notified about all KConfig changes
|
||||
Kconfig @leandrolanzieri @jia200x @cgundogan
|
||||
Kconfig @leandrolanzieri @jia200x @MrKevinWeiss
|
||||
pm.c @kaspar030
|
||||
|
||||
@ -257,7 +257,7 @@ Wrong:
|
||||
functionality.
|
||||
* Every function must be documented - including parameters and return value.
|
||||
|
||||
An examplary doxygen documentation in a header file can look like this.
|
||||
An exemplary doxygen documentation in a header file can look like this.
|
||||
|
||||
```
|
||||
/*
|
||||
@ -301,9 +301,7 @@ Some solutions to correctly handle compilation warnings.
|
||||
Solution for string formatting errors:
|
||||
|
||||
* When printing a `size_t`
|
||||
* use `%u` and cast the variable to `(unsigned)` because `newlib-nano` does
|
||||
not support `%zu`
|
||||
[example](https://github.com/RIOT-OS/RIOT/blob/e19f6463c09fc22c76c5b855799054cf27a697f1/tests/sizeof_tcb/main.c#L34)
|
||||
* use `PRIuSIZE` from `architecture.h` because `newlib-nano` does not support `%zu`
|
||||
* When printing an `unsigned char/uint8_t`
|
||||
* Use `%u` because `newlib-nano` does not support `%hu/PRIu8`
|
||||
[example](https://github.com/RIOT-OS/RIOT/pull/4851)
|
||||
|
||||
@ -195,15 +195,11 @@ into the source repository.
|
||||
* Try to answer reviews as quickly as possible to speed up the review process
|
||||
and avoid stalled PRs.
|
||||
|
||||
You can find more information about RIOT development procedure on this
|
||||
[wiki page][development-procedures].
|
||||
|
||||
[about-pull-requests]: https://help.github.com/articles/about-pull-requests/
|
||||
[development-models]: https://help.github.com/articles/creating-a-pull-request-from-a-fork
|
||||
[existing-pull-requests]: https://github.com/RIOT-OS/RIOT/pulls
|
||||
[archived-pull-requests]: https://github.com/RIOT-OS/RIOT/pulls?q=is:pr+label:"State:+archived"
|
||||
[uncrustify]: http://uncrustify.sourceforge.net
|
||||
[development-procedures]: https://github.com/RIOT-OS/RIOT/wiki/Development-procedures
|
||||
|
||||
## Writing Documentation
|
||||
[writing-documentation]: #writing-documentation
|
||||
|
||||
8
Kconfig
8
Kconfig
@ -18,16 +18,16 @@ rsource "kconfigs/Kconfig.errors"
|
||||
# For now, get used modules as macros from this file (see kconfig.mk)
|
||||
osource "$(KCONFIG_GENERATED_DEPENDENCIES)"
|
||||
|
||||
# Load first board configurations, which might override CPU's
|
||||
# Load first the application configuration, as it may declare symbols in priority
|
||||
osource "$(APPDIR)/Kconfig"
|
||||
|
||||
# Load board configurations, which might override CPU's
|
||||
orsource "$(BOARDDIR)/Kconfig"
|
||||
orsource "$(RIOTCPU)/$(CPU)/Kconfig"
|
||||
|
||||
rsource "$(RIOTBOARD)/Kconfig"
|
||||
rsource "$(RIOTCPU)/Kconfig"
|
||||
|
||||
# The application may declare new symbols as well
|
||||
osource "$(APPDIR)/Kconfig"
|
||||
|
||||
rsource "core/Kconfig"
|
||||
rsource "drivers/Kconfig"
|
||||
rsource "sys/Kconfig"
|
||||
|
||||
50
LICENSE
50
LICENSE
@ -6,6 +6,10 @@
|
||||
Everyone is permitted to copy and distribute verbatim copies
|
||||
of this license document, but changing it is not allowed.
|
||||
|
||||
[This is the first released version of the Lesser GPL. It also counts
|
||||
as the successor of the GNU Library Public License, version 2, hence
|
||||
the version number 2.1.]
|
||||
|
||||
Preamble
|
||||
|
||||
The licenses for most software are designed to take away your
|
||||
@ -452,3 +456,49 @@ SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH
|
||||
DAMAGES.
|
||||
|
||||
END OF TERMS AND CONDITIONS
|
||||
|
||||
How to Apply These Terms to Your New Libraries
|
||||
|
||||
If you develop a new library, and you want it to be of the greatest
|
||||
possible use to the public, we recommend making it free software that
|
||||
everyone can redistribute and change. You can do so by permitting
|
||||
redistribution under these terms (or, alternatively, under the terms of the
|
||||
ordinary General Public License).
|
||||
|
||||
To apply these terms, attach the following notices to the library. It is
|
||||
safest to attach them to the start of each source file to most effectively
|
||||
convey the exclusion of warranty; and each file should have at least the
|
||||
"copyright" line and a pointer to where the full notice is found.
|
||||
|
||||
<one line to give the library's name and a brief idea of what it does.>
|
||||
Copyright (C) <year> <name of author>
|
||||
|
||||
This library is free software; you can redistribute it and/or
|
||||
modify it under the terms of the GNU Lesser General Public
|
||||
License as published by the Free Software Foundation; either
|
||||
version 2.1 of the License, or (at your option) any later version.
|
||||
|
||||
This library is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
|
||||
Lesser General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU Lesser General Public
|
||||
License along with this library; if not, write to the Free Software
|
||||
Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301
|
||||
USA
|
||||
|
||||
Also add information on how to contact you by electronic and paper mail.
|
||||
|
||||
You should also get your employer (if you work as a programmer) or your
|
||||
school, if any, to sign a "copyright disclaimer" for the library, if
|
||||
necessary. Here is a sample; alter the names:
|
||||
|
||||
Yoyodyne, Inc., hereby disclaims all copyright interest in the
|
||||
library `Frob' (a library for tweaking knobs) written by James Random
|
||||
Hacker.
|
||||
|
||||
<signature of Ty Coon>, 1 April 1990
|
||||
Ty Coon, President of Vice
|
||||
|
||||
That's all there is to it!
|
||||
|
||||
@ -42,6 +42,15 @@ This way, their names are never removed from the RIOT repository.
|
||||
|
||||
# Removed Features
|
||||
|
||||
### cpu/mips* [6cad5d24771ba6199228351a11b5062cd2e9b36d]
|
||||
|
||||
Author:
|
||||
- Neil Jones <Neil.Jones@imgtec.com>
|
||||
|
||||
Reasons for removal:
|
||||
- Not maintained anymore
|
||||
- Current state is not very useful and nobody claimed to use it
|
||||
|
||||
### pkg/libcoap [d83d08f0995a88f399e70a7d07b44dd780082436]
|
||||
|
||||
Author:
|
||||
|
||||
@ -1,11 +1,11 @@
|
||||
# RIOT Maintainer Guidelines
|
||||
|
||||
This list presents a series of guidelines for maintainers, including technical
|
||||
and non-technical. The list is not exhaustive, and represents a baseline on
|
||||
This list presents a series of technical and non-technical guidelines for maintainers.
|
||||
The list is not exhaustive, it represents a baseline on
|
||||
things that should be ensured for contributions.
|
||||
|
||||
Notes:
|
||||
- Any of the items in this list might be skipped, if clearly and logically
|
||||
- Any of the items in this list can be skipped, if clearly and logically
|
||||
articulated reasons are presented.
|
||||
- The order of the steps is meant to maximize efficiency and minimize
|
||||
overhead, with the philosophy that failing in step n makes steps n+x
|
||||
@ -14,9 +14,9 @@ Notes:
|
||||
state (for example, due to poor code cleanliness or overall design), it
|
||||
might be more efficient to give the contributor some broader comments for
|
||||
improvement before further review.
|
||||
- This is a working document and any changes, additions, or other discussions
|
||||
- This is a working document: any changes, additions, or other discussions
|
||||
are encouraged, via PRs raised against the document. Changes to this
|
||||
document should however have at least two ACKs, to ensure these guidelines
|
||||
document should have at least two ACKs, to ensure these guidelines
|
||||
are well thought out, and that they reflect community consensus.
|
||||
|
||||
The [list of maintainers] gives information on the current maintainers and the
|
||||
@ -54,7 +54,7 @@ the overall validity of the PR.
|
||||
|
||||
### 2. - Review the design of the code
|
||||
|
||||
The following list is not exhaustive and addresses the coding issues we have
|
||||
The following list is not exhaustive, it addresses the coding issues we have
|
||||
regularly seen in the past. In particular, check that the [Best Practices]
|
||||
are followed. These checks can be aided (but not replaced) by a tool such as
|
||||
Coccinelle, using the script found in dist/tools/coccinelle.
|
||||
@ -99,7 +99,6 @@ complete that no input from the original developer or maintainer is required.
|
||||
3. Are critical/hard to understand parts in the code documented?
|
||||
4. Check grammar and spelling of documentation
|
||||
|
||||
|
||||
## Non-technical guidelines
|
||||
|
||||
### Interaction with contributors
|
||||
@ -116,7 +115,7 @@ complete that no input from the original developer or maintainer is required.
|
||||
means we are investing in our community.
|
||||
- Be friendly. Respect the original author, bearing in mind that their coding
|
||||
style or their design may be just as valid as the way you would have done
|
||||
it. And of course, always follow the [Code of Conduct].
|
||||
it and of course, always follow the [Code of Conduct].
|
||||
- If a contributor has opened a PR, the reviewer should attempt to
|
||||
help the author of the contribution to get it to its best shape and
|
||||
according to the RIOT Standard™. If there is disagreement, it’s important
|
||||
@ -135,14 +134,14 @@ Rather, give your verbal ACK and describe what you reviewed. In addition, if you
|
||||
processed or reasonably stepped over a whole section, mark the PR with the
|
||||
according label from the "Reviewed:" category. If you set a label by stepping
|
||||
over a section, please articulate your reasoning for this clearly, as noted in
|
||||
the [introduction](#introduction). This will help other maintainers help to
|
||||
the [introduction](#introduction). This will help other maintainers to
|
||||
better understand your line of thought. If you disagree with the assessment of
|
||||
a previous review, you may remove a certain "Reviewed:" label. Please state your
|
||||
reasoning in this case as well.
|
||||
|
||||
When all "Reviewed:" labels are set you may give your approval for the PR.
|
||||
|
||||
As everything in this document this is a "CAN", not a "MUST": It might help
|
||||
As for everything in this document this is a "CAN", not a "MUST": It might help
|
||||
other maintainers to track your work, but if the overhead isn't justified, a
|
||||
simple approving ACK might suffice.
|
||||
|
||||
|
||||
43
Makefile
43
Makefile
@ -7,6 +7,9 @@ all: welcome
|
||||
@exit 1
|
||||
|
||||
doc:
|
||||
@./dist/tools/features_yaml2mx/features_yaml2mx.py \
|
||||
features.yaml \
|
||||
--output-md doc/doxygen/src/feature_list.md
|
||||
"$(MAKE)" -BC doc/doxygen
|
||||
|
||||
doc-man:
|
||||
@ -30,22 +33,40 @@ distclean: docclean pkg-clean
|
||||
@echo "Cleaning all build products"
|
||||
@for dir in $(APPLICATION_DIRS); do "$(MAKE)" -C$$dir distclean; done
|
||||
|
||||
welcome:
|
||||
@echo "Welcome to RIOT - The friendly OS for IoT!"
|
||||
@echo ""
|
||||
@echo "You executed 'make' from the base directory."
|
||||
@echo "You should run 'make' in your application's directory instead."
|
||||
@echo ""
|
||||
@echo "Please see our Quick Start Guide at:"
|
||||
@echo " https://doc.riot-os.org/getting-started.html"
|
||||
@echo "You can ask questions or discuss with other users on our forum:"
|
||||
@echo " https://forum.riot-os.org"
|
||||
|
||||
print-versions:
|
||||
@./dist/tools/ci/print_toolchain_versions.sh
|
||||
|
||||
generate-features:
|
||||
@./dist/tools/features_yaml2mx/features_yaml2mx.py \
|
||||
features.yaml \
|
||||
--output-makefile makefiles/features_existing.inc.mk
|
||||
|
||||
include makefiles/boards.inc.mk
|
||||
include makefiles/app_dirs.inc.mk
|
||||
|
||||
include makefiles/tools/riotgen.inc.mk
|
||||
-include makefiles/tests.inc.mk
|
||||
|
||||
include makefiles/color.inc.mk
|
||||
|
||||
welcome:
|
||||
@echo "Welcome to RIOT - The friendly OS for IoT!"
|
||||
@echo ""
|
||||
@echo "You executed 'make' from the base directory."
|
||||
@echo "Usually, you should run 'make' in your application's directory instead."
|
||||
@echo ""
|
||||
@echo "Please see our Quick Start Guide at:"
|
||||
@echo " https://doc.riot-os.org/getting-started.html"
|
||||
@echo "You can ask questions or discuss with other users on our forum:"
|
||||
@echo " https://forum.riot-os.org"
|
||||
@echo ""
|
||||
@echo "Available targets for the RIOT base directory include:"
|
||||
@echo " generate-{board,driver,example,module,pkg,test,features}"
|
||||
@echo " info-{applications,boards,emulated-boards} info-applications-supported-boards"
|
||||
@echo " print-versions"
|
||||
@echo " clean distclean pkg-clean"
|
||||
@echo " doc doc-{man,latex}"
|
||||
@echo ""
|
||||
@echo "==> tl;dr Try running:"
|
||||
@echo " cd examples/default"
|
||||
@echo " make BOARD=<INSERT_BOARD_NAME>"
|
||||
|
||||
20
Makefile.dep
20
Makefile.dep
@ -19,6 +19,9 @@ include $(RIOTBASE)/drivers/Makefile.dep
|
||||
# pull Makefile.dep of each driver modules if they exist
|
||||
-include $(sort $(USEMODULE:%=$(RIOTBASE)/drivers/%/Makefile.dep))
|
||||
|
||||
# pull Makefile.dep of each sys modules if they exist
|
||||
-include $(sort $(USEMODULE:%=$(RIOTBASE)/sys/%/Makefile.dep))
|
||||
|
||||
# pull dependencies from packages
|
||||
-include $(PKG_PATHS:%=%Makefile.dep)
|
||||
|
||||
@ -30,6 +33,10 @@ ifneq (,$(filter mpu_noexec_ram,$(USEMODULE)))
|
||||
FEATURES_REQUIRED += cortexm_mpu
|
||||
endif
|
||||
|
||||
ifneq (,$(filter pmp_noexec_ram,$(USEMODULE)))
|
||||
FEATURES_REQUIRED += periph_pmp
|
||||
endif
|
||||
|
||||
ifneq (,$(filter lwip_%,$(USEMODULE)))
|
||||
USEPKG += lwip
|
||||
endif
|
||||
@ -72,6 +79,11 @@ ifneq (,$(filter fatfs_vfs,$(USEMODULE)))
|
||||
USEMODULE += vfs
|
||||
endif
|
||||
|
||||
ifneq (,$(filter lwext%_vfs,$(USEMODULE)))
|
||||
USEPKG += lwext4
|
||||
USEMODULE += vfs
|
||||
endif
|
||||
|
||||
ifneq (,$(filter nimble_%,$(USEMODULE)))
|
||||
USEPKG += nimble
|
||||
endif
|
||||
@ -84,6 +96,14 @@ ifneq (,$(filter tinydtls_sock_dtls, $(USEMODULE)))
|
||||
USEPKG += tinydtls
|
||||
endif
|
||||
|
||||
ifneq (,$(filter flashdb_%,$(USEMODULE)))
|
||||
USEPKG += flashdb
|
||||
endif
|
||||
|
||||
ifneq (,$(filter tinyusb_%, $(USEMODULE)))
|
||||
USEPKG += tinyusb
|
||||
endif
|
||||
|
||||
# always select gpio (until explicit dependencies are sorted out)
|
||||
FEATURES_OPTIONAL += periph_gpio
|
||||
|
||||
|
||||
@ -13,7 +13,7 @@ include $(BOARDDIR)/Makefile.features
|
||||
|
||||
# Sanity check
|
||||
ifeq (,$(CPU))
|
||||
$(error CPU must be defined by board / board_common Makefile.features)
|
||||
$(error $(BOARD): CPU must be defined by board / board_common Makefile.features)
|
||||
endif
|
||||
|
||||
include $(RIOTCPU)/$(CPU)/Makefile.features
|
||||
@ -23,4 +23,11 @@ FEATURES_PROVIDED += cpu_$(CPU)
|
||||
|
||||
# Features that are conflicting for all architectures
|
||||
FEATURES_CONFLICT += picolibc:newlib
|
||||
FEATURES_CONFLICT_MSG += "Only one standard C library can be used"
|
||||
FEATURES_CONFLICT_MSG += "Only one standard C library can be used."
|
||||
|
||||
FEATURES_CONFLICT += periph_gpio_irq:periph_gpio_ll_irq
|
||||
FEATURES_CONFLICT_MSG += "Only one GPIO IRQ implementation can be used."
|
||||
|
||||
FEATURES_CONFLICT += periph_usbdev:tinyusb_device
|
||||
FEATURES_CONFLICT += periph_usbdev:tinyusb_host
|
||||
FEATURES_CONFLICT_MSG += "Package tinyUSB is not yet compatible with periph_usbdev."
|
||||
|
||||
132
Makefile.include
132
Makefile.include
@ -56,7 +56,7 @@ BUILD_DIR ?= $(RIOTBASE)/build
|
||||
APPDIR ?= $(CURDIR)
|
||||
BINDIRBASE ?= $(APPDIR)/bin
|
||||
BINDIR ?= $(BINDIRBASE)/$(BOARD)
|
||||
PKGDIRBASE ?= $(RIOTBASE)/build/pkg
|
||||
PKGDIRBASE ?= $(BUILD_DIR)/pkg
|
||||
DLCACHE ?= $(RIOTTOOLS)/dlcache/dlcache.sh
|
||||
DLCACHE_DIR ?= $(RIOTBASE)/.dlcache
|
||||
RIOT_VERSION_DUMMY_CODE ?= RIOT_VERSION_NUM\(2042,5,23,0\)
|
||||
@ -117,7 +117,6 @@ ifneq ($(RIOT_CI_BUILD),1)
|
||||
ifeq ($(MAKELEVEL),0)
|
||||
ifneq (,$(BOARDSDIR))
|
||||
$(warning Using BOARDSDIR is deprecated use EXTERNAL_BOARD_DIRS instead)
|
||||
$(info EXTERNAL_BOARD_DIRS can contain multiple folders separated by space)
|
||||
endif
|
||||
endif
|
||||
endif
|
||||
@ -172,6 +171,8 @@ CLEAN = $(filter clean, $(MAKECMDGOALS))
|
||||
include $(RIOTMAKE)/utils/variables.mk
|
||||
include $(RIOTMAKE)/utils/strings.mk
|
||||
|
||||
# include nimble makefile tools
|
||||
include $(RIOTMAKE)/pkg/nimble.adv.mk
|
||||
|
||||
# UNAME is always needed so use simple variable expansion so only evaluated once
|
||||
UNAME := $(shell uname -m -s)
|
||||
@ -203,10 +204,11 @@ include $(RIOTMAKE)/boards.inc.mk
|
||||
include $(RIOTMAKE)/dependencies_debug.inc.mk
|
||||
|
||||
# Use TOOLCHAIN environment variable to select the toolchain to use.
|
||||
# If native, TOOLCHAIN for OSX is llvm
|
||||
ifeq ($(BOARD),native)
|
||||
ifneq (,$(filter native native64,$(BOARD)))
|
||||
ifeq ($(OS),Darwin)
|
||||
TOOLCHAIN ?= llvm
|
||||
$(shell $(COLOR_ECHO) "$(COLOR_RED)"Buildin on macOS is not supported."\
|
||||
"We recommend vagrant for building:$(COLOR_RESET)"\
|
||||
"https://github.com/RIOT-OS/RIOT/blob/master/dist/tools/vagrant/README.md 1>&2)
|
||||
endif
|
||||
endif
|
||||
# Use override so that we can redefine a variable set on the command line (as
|
||||
@ -232,7 +234,7 @@ GLOBAL_GOALS += buildtest \
|
||||
info-boards-features-missing \
|
||||
info-boards-supported \
|
||||
info-buildsizes info-buildsizes-diff \
|
||||
create-Makefile.ci \
|
||||
generate-Makefile.ci \
|
||||
#
|
||||
|
||||
ifneq (, $(filter $(GLOBAL_GOALS), $(MAKECMDGOALS)))
|
||||
@ -393,11 +395,6 @@ ifneq (,$(IOTLAB_NODE))
|
||||
PROGRAMMER ?= iotlab
|
||||
# iotlab uses ELFFILE by default for flashing boards.
|
||||
FLASHFILE ?= $(ELFFILE)
|
||||
# RIOT_CI_BUILD disables the build of BINFILE which is required for flashing
|
||||
# on IoT-LAB
|
||||
ifeq (1,$(RIOT_CI_BUILD))
|
||||
BUILD_FILES += $(BINFILE)
|
||||
endif
|
||||
# Disable IOTLAB_NODE if inside Docker to avoid including the
|
||||
# iotlab.single.inc.mk file which is useless there: it's only useful for
|
||||
# flashing and this is done outside of Docker.
|
||||
@ -407,7 +404,10 @@ ifneq (,$(IOTLAB_NODE))
|
||||
endif
|
||||
|
||||
# Add standard include directories
|
||||
INCLUDES += -I$(RIOTBASE)/core/include -I$(RIOTBASE)/drivers/include -I$(RIOTBASE)/sys/include
|
||||
INCLUDES += -I$(RIOTBASE)/core/lib/include
|
||||
INCLUDES += -I$(RIOTBASE)/core/include
|
||||
INCLUDES += -I$(RIOTBASE)/drivers/include
|
||||
INCLUDES += -I$(RIOTBASE)/sys/include
|
||||
|
||||
# process provided features
|
||||
include $(RIOTBASE)/Makefile.features
|
||||
@ -420,7 +420,7 @@ endif
|
||||
|
||||
# mandatory includes!
|
||||
include $(RIOTMAKE)/pseudomodules.inc.mk
|
||||
include $(RIOTMAKE)/defaultmodules.inc.mk
|
||||
include $(RIOTMAKE)/defaultmodules_regular.inc.mk
|
||||
|
||||
# Include Kconfig functionalities
|
||||
include $(RIOTMAKE)/kconfig.mk
|
||||
@ -460,6 +460,11 @@ else
|
||||
include $(RIOTMAKE)/dependency_resolution.inc.mk
|
||||
endif
|
||||
|
||||
# Include dfu-util configuration when using riotboot_dfu bootloader before
|
||||
# including the board's Makefile.include which could define dfu-util
|
||||
# configuration for other DFU bootloaders in use.
|
||||
include $(RIOTMAKE)/boot/riotboot_dfu-util.mk
|
||||
|
||||
# Include Board and CPU configuration
|
||||
INCLUDES += $(addprefix -I,$(wildcard $(BOARDDIR)/include))
|
||||
include $(BOARDDIR)/Makefile.include
|
||||
@ -484,11 +489,13 @@ endif
|
||||
|
||||
# Check if programmer is supported by the board, only if PROGRAMMERS_SUPPORTED
|
||||
# is set and if programmer is not iotlab
|
||||
ifneq (iotlab,$(PROGRAMMER))
|
||||
ifneq (,$(PROGRAMMERS_SUPPORTED))
|
||||
ifeq (,$(filter $(PROGRAMMER),$(PROGRAMMERS_SUPPORTED)))
|
||||
$(info '$(PROGRAMMER)' programmer is not supported by this board. \
|
||||
Supported programmers: '$(PROGRAMMERS_SUPPORTED)')
|
||||
ifneq ($(RIOT_CI_BUILD),1)
|
||||
ifneq (iotlab,$(PROGRAMMER))
|
||||
ifneq (,$(PROGRAMMERS_SUPPORTED))
|
||||
ifeq (,$(filter $(PROGRAMMER),$(PROGRAMMERS_SUPPORTED)))
|
||||
$(warning '$(PROGRAMMER)' programmer is not supported by this board. \
|
||||
Supported programmers: '$(PROGRAMMERS_SUPPORTED)')
|
||||
endif
|
||||
endif
|
||||
endif
|
||||
endif
|
||||
@ -516,17 +523,12 @@ include $(RIOTMAKE)/ubsan.inc.mk
|
||||
# For more information, see http://petereisentraut.blogspot.com/2011/09/ccache-and-clang-part-2.html
|
||||
export CCACHE_CPP2=yes
|
||||
|
||||
ifeq ($(strip $(MCU)),)
|
||||
MCU = $(CPU)
|
||||
endif
|
||||
|
||||
# set some settings useful for continuous integration builds
|
||||
ifeq ($(RIOT_CI_BUILD),1)
|
||||
RIOT_VERSION ?= buildtest
|
||||
# set a dummy version number
|
||||
RIOT_VERSION_CODE ?= $(RIOT_VERSION_DUMMY_CODE)
|
||||
ifneq ($(filter $(BOARD_INSUFFICIENT_MEMORY), $(BOARD)),)
|
||||
$(info CI-build: skipping link step)
|
||||
RIOTNOLINK:=1
|
||||
endif
|
||||
# be more quiet when building for CI
|
||||
@ -542,11 +544,9 @@ endif
|
||||
# if you want to publish the board into the sources as an uppercase #define
|
||||
BOARDDEF = $(call uppercase_and_underscore,$(BOARD))
|
||||
CPUDEF = $(call uppercase_and_underscore,$(CPU))
|
||||
MCUDEF = $(call uppercase_and_underscore,$(MCU))
|
||||
CFLAGS += -DRIOT_APPLICATION=\"$(APPLICATION)\"
|
||||
CFLAGS += -DBOARD_$(BOARDDEF)=\"$(BOARD)\" -DRIOT_BOARD=BOARD_$(BOARDDEF)
|
||||
CFLAGS += -DCPU_$(CPUDEF)=\"$(CPU)\" -DRIOT_CPU=CPU_$(CPUDEF)
|
||||
CFLAGS += -DMCU_$(MCUDEF)=\"$(MCU)\" -DRIOT_MCU=MCU_$(MCUDEF)
|
||||
|
||||
# Feature test default CFLAGS and LINKFLAGS for the set compiled.
|
||||
include $(RIOTMAKE)/cflags.inc.mk
|
||||
@ -617,7 +617,7 @@ include $(RIOTMAKE)/modules.inc.mk
|
||||
|
||||
|
||||
.PHONY: all link clean flash flash-only termdeps term doc debug debug-server reset objdump help info-modules
|
||||
.PHONY: print-size elffile binfile hexfile flashfile cosy
|
||||
.PHONY: print-size elffile lstfile binfile hexfile flashfile cosy
|
||||
.PHONY: ..in-docker-container
|
||||
|
||||
# Targets that depend on FORCE will always be rebuilt. Contrary to a .PHONY
|
||||
@ -649,9 +649,11 @@ endif
|
||||
ELFFILE ?= $(BINDIR)/$(APPLICATION).elf
|
||||
HEXFILE ?= $(ELFFILE:.elf=.hex)
|
||||
BINFILE ?= $(ELFFILE:.elf=.bin)
|
||||
HASHFILE ?= $(BINFILE)
|
||||
MAPFILE ?= $(ELFFILE:.elf=.map)
|
||||
LSTFILE ?= $(ELFFILE:.elf=.lst)
|
||||
|
||||
ifneq (,$(filter suit, $(USEMODULE)))
|
||||
ifneq (,$(filter suit,$(USEMODULE)))
|
||||
include $(RIOTMAKE)/suit.base.inc.mk
|
||||
endif
|
||||
|
||||
@ -660,26 +662,29 @@ endif
|
||||
# It should be included after defining 'BINFILE' for 'riotboot.bin' handling.
|
||||
include $(RIOTMAKE)/boot/riotboot.mk
|
||||
|
||||
# include suit targets
|
||||
ifneq (,$(filter suit,$(USEMODULE)))
|
||||
include $(RIOTMAKE)/suit.inc.mk
|
||||
endif
|
||||
|
||||
# elf file used for the debugger, must include bootloader offset
|
||||
DEBUG_ELFFILE ?= $(ELFFILE)
|
||||
|
||||
# Targets to get given file
|
||||
elffile: $(ELFFILE)
|
||||
hexfile: $(HEXFILE)
|
||||
binfile: $(BINFILE)
|
||||
lstfile: $(LSTFILE)
|
||||
# FLASHFILE is the file used by the flasher
|
||||
# Usually set to $(ELFFILE), $(HEXFILE) or $(BINFILE) in the board/flasher
|
||||
# or application specific files
|
||||
flashfile: $(FLASHFILE)
|
||||
|
||||
ifeq (,$(FLASHFILE))
|
||||
$(error FLASHFILE is not defined for this board: $(FLASHFILE))
|
||||
$(error FLASHFILE is not defined for this board: $(BOARD))
|
||||
endif
|
||||
|
||||
# By default always build ELFFILE, BINFILE and FLASHFILE
|
||||
ifeq ($(RIOT_CI_BUILD),1)
|
||||
# Don't build BINFILE on the CI to save some computation time
|
||||
BUILD_FILES += $(ELFFILE) $(FLASHFILE)
|
||||
else
|
||||
BUILD_FILES += $(ELFFILE) $(BINFILE) $(FLASHFILE)
|
||||
endif
|
||||
BUILD_FILES += $(ELFFILE) $(BINFILE) $(FLASHFILE) $(HASHFILE)
|
||||
|
||||
# variables used to compile and link c++
|
||||
ifneq (,$(filter cpp,$(USEMODULE)))
|
||||
@ -697,6 +702,12 @@ BUILDDEPS += $(RIOTBUILD_CONFIG_HEADER_C)
|
||||
BUILDDEPS += pkg-prepare
|
||||
BUILDDEPS += $(APPDEPS)
|
||||
BUILDDEPS += $(MODULE_LIST_DIR)
|
||||
BUILDDEPS += $(BUILD_DIR)/CACHEDIR.TAG
|
||||
|
||||
# Build dependencies depend on clean (if a make goal), as clean may wipe them.
|
||||
# Without them depending on clean parallel builds occasionally fail due to
|
||||
# clean removing dependencies that make previously considered as up to date.
|
||||
$(BUILDDEPS): $(CLEAN)
|
||||
|
||||
# Save value to verify it is not modified later
|
||||
_BASELIBS_VALUE_BEFORE_USAGE := $(BASELIBS)
|
||||
@ -712,6 +723,15 @@ else
|
||||
_LINK = $(if $(CPPMIX),$(LINKXX),$(LINK)) $$(find $(BASELIBS:%.module=$(BINDIR)/%/) -name "*.o" 2> /dev/null | sort) $(ARCHIVES_GROUP) $(LINKFLAGS) $(LINKFLAGPREFIX)-Map=$(BINDIR)/$(APPLICATION).map
|
||||
endif # BUILDOSXNATIVE
|
||||
|
||||
COMPILE_COMMANDS_PATH ?= $(if $(findstring $(RIOTBASE),$(APPDIR)),$(RIOTBASE)/compile_commands.json, $(APPDIR)/compile_commands.json)
|
||||
COMPILE_COMMANDS_FLAGS ?= --clangd
|
||||
.PHONY: compile-commands
|
||||
compile-commands: $(BUILDDEPS)
|
||||
$(Q)DIRS="$(DIRS)" APPLICATION_BLOBS="$(BLOBS)" \
|
||||
"$(MAKE)" -C $(APPDIR) -f $(RIOTMAKE)/application.inc.mk compile-commands
|
||||
$(Q)$(RIOTTOOLS)/compile_commands/compile_commands.py $(COMPILE_COMMANDS_FLAGS) $(BINDIR) \
|
||||
> $(COMPILE_COMMANDS_PATH)
|
||||
|
||||
ifeq ($(BUILD_IN_DOCKER),1)
|
||||
link: ..in-docker-container
|
||||
else
|
||||
@ -721,7 +741,7 @@ else
|
||||
link: ..compiler-check ..build-message $(BASELIBS) $(ARCHIVES) ..module-check
|
||||
endif # RIOTNOLINK
|
||||
|
||||
$(ELFFILE): $(BASELIBS) $(ARCHIVES)
|
||||
$(ELFFILE): $(BASELIBS) $(ARCHIVES) $(LD_SCRIPTS)
|
||||
$(Q)$(_LINK) -o $@
|
||||
|
||||
.PHONY: $(APPLICATION_MODULE).module
|
||||
@ -735,15 +755,6 @@ $(APPLICATION_MODULE).module: pkg-build $(BUILDDEPS)
|
||||
"$(MAKE)" -C $(APPDIR) -f $(RIOTMAKE)/application.inc.mk
|
||||
$(APPLICATION_MODULE).module: FORCE
|
||||
|
||||
COMPILE_COMMANDS_PATH ?= $(RIOTBASE)/compile_commands.json
|
||||
COMPILE_COMMANDS_FLAGS ?= --clangd
|
||||
.PHONY: compile-commands
|
||||
compile-commands: $(BUILDDEPS)
|
||||
$(Q)DIRS="$(DIRS)" APPLICATION_BLOBS="$(BLOBS)" \
|
||||
"$(MAKE)" -C $(APPDIR) -f $(RIOTMAKE)/application.inc.mk compile-commands
|
||||
$(Q)$(RIOTTOOLS)/compile_commands/compile_commands.py $(COMPILE_COMMANDS_FLAGS) $(BINDIR) \
|
||||
> $(COMPILE_COMMANDS_PATH)
|
||||
|
||||
# Other modules are built by application.inc.mk and packages building
|
||||
_SUBMAKE_LIBS = $(filter-out $(APPLICATION_MODULE).module $(APPDEPS), $(BASELIBS) $(ARCHIVES))
|
||||
$(_SUBMAKE_LIBS): $(APPLICATION_MODULE).module pkg-build
|
||||
@ -752,12 +763,22 @@ $(_SUBMAKE_LIBS): $(APPLICATION_MODULE).module pkg-build
|
||||
print-size: $(ELFFILE)
|
||||
$(Q)$(SIZE) $(SIZEFLAGS) $<
|
||||
|
||||
$(BUILD_DIR)/CACHEDIR.TAG:
|
||||
$(Q)mkdir -p "$(BUILD_DIR)"
|
||||
$(Q)echo "Signature: 8a477f597d28d172789f06886806bc55" > "$@"
|
||||
$(Q)echo "# This folder contains RIOT's build cache" >> "$@"
|
||||
|
||||
%.hex: %.elf
|
||||
$(Q)$(OBJCOPY) $(OFLAGS) -Oihex $< $@
|
||||
|
||||
%.bin: %.elf
|
||||
$(Q)$(OBJCOPY) $(OFLAGS) -Obinary $< $@
|
||||
|
||||
%.lst: %.elf
|
||||
$(Q)$(OBJDUMP) --disassemble-all --file-headers --file-offsets \
|
||||
--section-headers --line-numbers --private-headers --source --wide \
|
||||
--disassemble-zeroes $< > $@
|
||||
|
||||
endif # BUILD_IN_DOCKER
|
||||
|
||||
# Check given command is available in the path
|
||||
@ -785,7 +806,7 @@ endif
|
||||
$(call check_cmd,$(CC),Compiler)
|
||||
|
||||
..build-message: $(if $(SHOULD_RUN_KCONFIG), check-kconfig-errors)
|
||||
@$(COLOR_ECHO) '$(COLOR_GREEN)Building application "$(APPLICATION)" for "$(BOARD)" with MCU "$(MCU)".$(COLOR_RESET)'
|
||||
@$(COLOR_ECHO) '$(COLOR_GREEN)Building application "$(APPLICATION)" for "$(BOARD)" with CPU "$(CPU)".$(COLOR_RESET)'
|
||||
@$(COLOR_ECHO)
|
||||
|
||||
# The `clean` needs to be serialized before everything else.
|
||||
@ -841,8 +862,9 @@ preflash: $(BUILD_BEFORE_FLASH)
|
||||
|
||||
# graphical memory usage analyzer
|
||||
COSY_TOOL ?= $(PKGDIRBASE)/cosy/cosy.py
|
||||
COSY_PORT ?= 12345
|
||||
cosy: $(ELFFILE) $(COSY_TOOL)
|
||||
$(COSY_TOOL) --riot-base $(RIOTBASE) $(APPDIR) $(BOARD) $(ELFFILE) $(MAPFILE)
|
||||
$(COSY_TOOL) --port $(COSY_PORT) --riot-base $(RIOTBASE) $(APPDIR) $(BOARD) $(ELFFILE) $(MAPFILE)
|
||||
|
||||
ifneq (,$(TERMLOG)$(TERMTEE))
|
||||
TERMTEE ?= | tee -a $(TERMLOG)
|
||||
@ -854,7 +876,7 @@ termdeps: $(TERMDEPS)
|
||||
|
||||
term: $(TERMDEPS)
|
||||
$(call check_cmd,$(TERMPROG),Terminal program)
|
||||
$(TERMPROG) $(TERMFLAGS) $(TERMTEE)
|
||||
${TERMENV} $(TERMPROG) $(TERMFLAGS) $(TERMTEE)
|
||||
|
||||
# Term without the pyterm added logging
|
||||
# PYTERMFLAGS must be exported for `jlink.sh term-rtt`.
|
||||
@ -864,7 +886,7 @@ cleanterm: $(TERMDEPS)
|
||||
$(TERMPROG) $(TERMFLAGS) $(TERMTEE)
|
||||
|
||||
list-ttys:
|
||||
$(Q)$(RIOTTOOLS)/usb-serial/list-ttys.sh
|
||||
$(Q)$(RIOTTOOLS)/usb-serial/ttys.py
|
||||
|
||||
doc:
|
||||
$(MAKE) -BC $(RIOTBASE) doc
|
||||
@ -873,6 +895,10 @@ debug: $(DEBUGDEPS)
|
||||
$(call check_cmd,$(DEBUGGER),Debug program)
|
||||
$(DEBUGGER) $(DEBUGGER_FLAGS)
|
||||
|
||||
debug-client:
|
||||
$(call check_cmd,$(DEBUGCLIENT),Debug client program)
|
||||
$(DEBUGCLIENT) $(DEBUGCLIENT_FLAGS)
|
||||
|
||||
debug-server:
|
||||
$(call check_cmd,$(DEBUGSERVER),Debug server program)
|
||||
$(DEBUGSERVER) $(DEBUGSERVER_FLAGS)
|
||||
@ -893,7 +919,7 @@ include $(RIOTMAKE)/tests/tests.inc.mk
|
||||
.PHONY: fuzz
|
||||
fuzz:
|
||||
env FLASHFILE="$(FLASHFILE)" PORT="$(PORT)" TERMFLAGS="$(TERMFLAGS)" \
|
||||
"$(RIOTBASE)"/dist/tools/fuzzing/afl.sh $(AFL_FLAGS)
|
||||
"$(RIOTBASE)"/dist/tools/fuzzing/afl.sh $(FLAGS_FOR_AFL)
|
||||
|
||||
# Default OBJDUMPFLAGS for platforms which do not specify it:
|
||||
OBJDUMPFLAGS ?= -S -D -h
|
||||
@ -999,7 +1025,8 @@ ifneq (, $(filter all flash, $(if $(MAKECMDGOALS), $(MAKECMDGOALS), all)))
|
||||
endif
|
||||
|
||||
help:
|
||||
@$(MAKE) -qp | sed -ne 's/\(^[a-z][a-z_-]*\):.*/\1/p' | sort | uniq
|
||||
# filter all targets starting with lowercase and containing lowercase letters, hyphens, or underscores; explicitly include generate-Makefile.ci
|
||||
@$(MAKE) -qp | sed -ne 's/\(^[a-z][a-z_-]*\|generate-Makefile.ci\):.*/\1/p' | sort -u
|
||||
|
||||
ifeq (iotlab-m3,$(BOARD))
|
||||
ifneq (,$(filter iotlab-%,$(MAKECMDGOALS)))
|
||||
@ -1039,6 +1066,9 @@ $(RIOTBUILD_CONFIG_HEADER_C).in: FORCE | $(CLEAN)
|
||||
CFLAGS_WITH_MACROS += $(CFLAGS)
|
||||
CFLAGS_WITH_MACROS += -DRIOT_VERSION=\"$(RIOT_VERSION)\"
|
||||
CFLAGS_WITH_MACROS += -DRIOT_VERSION_CODE=$(RIOT_VERSION_CODE)
|
||||
ifneq (,$(RIOT_VERSION_EXTRA))
|
||||
CFLAGS_WITH_MACROS += -DCONFIG_RIOT_VERSION_EXTRA=\""$(RIOT_VERSION_EXTRA)"\"
|
||||
endif
|
||||
# MODULE_NAME defines. Declared in 'makefiles/modules.inc.mk'
|
||||
CFLAGS_WITH_MACROS += $(EXTDEFINES)
|
||||
|
||||
|
||||
42
README.md
42
README.md
@ -1,5 +1,4 @@
|
||||
[![Nightly CI status master][master-ci-badge]][master-ci-link]
|
||||
[![Nightly HiL CI overview][hil-ci-badge]][hil-ci-link]
|
||||
[![GitHub release][release-badge]][release-link]
|
||||
[![License][license-badge]][license-link]
|
||||
[![API docs][api-badge]][api-link]
|
||||
@ -53,29 +52,36 @@ indirect business models around the free open-source software platform
|
||||
provided by RIOT, e.g. it is possible to link closed-source code with the
|
||||
LGPL code.
|
||||
|
||||
## FEATURES
|
||||
## Features
|
||||
|
||||
RIOT is based on a microkernel architecture, and provides features including,
|
||||
but not limited to:
|
||||
RIOT provides features including, but not limited to:
|
||||
|
||||
* a preemptive, tickless scheduler with priorities
|
||||
* flexible memory management
|
||||
* high resolution, long-term timers
|
||||
* support 100+ boards based on AVR, MSP430, ESP8266, ESP32, MIPS, RISC-V,
|
||||
* MTD abstraction layer
|
||||
* File System integration
|
||||
* support 200+ boards based on AVR, MSP430, ESP8266, ESP32, RISC-V,
|
||||
ARM7 and ARM Cortex-M
|
||||
* the native port allows to run RIOT as-is on Linux, BSD, and MacOS. Multiple
|
||||
instances of RIOT running on a single machine can also be interconnected via
|
||||
a simple virtual Ethernet bridge
|
||||
* the native port allows to run RIOT as-is on Linux and BSD.
|
||||
Multiple instances of RIOT running on a single machine can also be
|
||||
interconnected via a simple virtual Ethernet bridge or via a simulated
|
||||
IEEE 802.15.4 network (ZEP)
|
||||
* IPv6
|
||||
* 6LoWPAN (RFC4944, RFC6282, and RFC6775)
|
||||
* UDP
|
||||
* RPL (storing mode, P2P mode)
|
||||
* CoAP
|
||||
* OTA updates via SUIT
|
||||
* MQTT
|
||||
* USB (device mode)
|
||||
* Display / Touchscreen support
|
||||
* CCN-Lite
|
||||
* Sigfox
|
||||
* LoRaWAN
|
||||
* UWB
|
||||
* Bluetooth (BLE) via [NimBLE](https://github.com/apache/mynewt-nimble)
|
||||
|
||||
## GETTING RIOT
|
||||
## Getting RIOT
|
||||
|
||||
The most convenient way to get RIOT is to clone it via Git
|
||||
|
||||
@ -100,7 +106,7 @@ For more details on our release cycle, check our [documentation][release cycle].
|
||||
[releases]: https://github.com/RIOT-OS/RIOT/releases
|
||||
[release cycle]: https://doc.riot-os.org/release-cycle.html
|
||||
|
||||
## GETTING STARTED
|
||||
## Getting Started
|
||||
* You want to start the RIOT? Just follow our
|
||||
[quickstart guide](https://doc.riot-os.org/index.html#the-quickest-start) or
|
||||
try this
|
||||
@ -111,23 +117,23 @@ For specific toolchain installation, follow instructions in the
|
||||
version of the documentation is uploaded daily to
|
||||
[doc.riot-os.org](https://doc.riot-os.org).
|
||||
|
||||
## FORUM
|
||||
## Forum
|
||||
Do you have a question, want to discuss a new feature, or just want to present
|
||||
your latest project using RIOT? Come over to our [forum] and post to your hearts
|
||||
content.
|
||||
|
||||
[forum]: https://forum.riot-os.org
|
||||
|
||||
## CONTRIBUTE
|
||||
## Contribute
|
||||
|
||||
To contribute something to RIOT, please refer to our
|
||||
[contributing document](CONTRIBUTING.md).
|
||||
|
||||
## MAILING LISTS
|
||||
## Mailing Lists
|
||||
* RIOT commits: [commits@riot-os.org](https://lists.riot-os.org/mailman/listinfo/commits)
|
||||
* Github notifications: [notifications@riot-os.org](https://lists.riot-os.org/mailman/listinfo/notifications)
|
||||
|
||||
## LICENSE
|
||||
## License
|
||||
* Most of the code developed by the RIOT community is licensed under the GNU
|
||||
Lesser General Public License (LGPL) version 2.1 as published by the Free
|
||||
Software Foundation.
|
||||
@ -145,8 +151,8 @@ https://www.riot-os.org
|
||||
[api-link]: https://doc.riot-os.org/
|
||||
[license-badge]: https://img.shields.io/github/license/RIOT-OS/RIOT
|
||||
[license-link]: https://github.com/RIOT-OS/RIOT/blob/master/LICENSE
|
||||
[master-ci-badge]: https://ci.riot-os.org/RIOT-OS/RIOT/master/latest/badge.svg
|
||||
[master-ci-link]: https://ci.riot-os.org/nightlies.html#master
|
||||
[master-ci-badge]: https://ci.riot-os.org/job/branch/master/badge
|
||||
[master-ci-link]: https://ci.riot-os.org/details/branch/master
|
||||
[matrix-badge]: https://img.shields.io/badge/chat-Matrix-brightgreen.svg
|
||||
[matrix-link]: https://matrix.to/#/#riot-os:matrix.org
|
||||
[merge-chance-link]: https://merge-chance.info/target?repo=RIOT-OS/RIOT
|
||||
@ -158,5 +164,3 @@ https://www.riot-os.org
|
||||
[twitter-link]: https://twitter.com/RIOT_OS
|
||||
[wiki-badge]: https://img.shields.io/badge/docs-Wiki-informational.svg
|
||||
[wiki-link]: https://github.com/RIOT-OS/RIOT/wiki
|
||||
[hil-ci-link]: https://hil.riot-os.org/results/nightly/latest/overview
|
||||
[hil-ci-badge]: https://img.shields.io/badge/CI-HiL-blue
|
||||
|
||||
13
SECURITY.md
13
SECURITY.md
@ -3,6 +3,11 @@
|
||||
All security bugs reported will be silently fixed in `master` and backported
|
||||
to the previous release.
|
||||
|
||||
When CVE numbers are assigned to RIOT vulnerabilities, they are associated with
|
||||
[CPE] identifiers in the shape of `cpe:2.3:o:riot-os:riot:<VERSION>`.
|
||||
|
||||
[CPE]: https://nvd.nist.gov/products/cpe
|
||||
|
||||
## Reporting a Vulnerability
|
||||
|
||||
If a security issue is discovered, please report it to security@riot-os.org.
|
||||
@ -15,6 +20,14 @@ bottom of this file.
|
||||
|
||||
[security-gpg]: https://riot-os.org/assets/keys/security.asc
|
||||
|
||||
### Classification of a vulnerability
|
||||
|
||||
Unless the reporter explicitly requests not to do so,
|
||||
the RIOT security maintainers may declassify an issue
|
||||
if the issue is not deemed critical --
|
||||
for example when it requires an unlikely combination of circumstances and/or configuration options,
|
||||
or when it can only be exploited by a user who gains no additional privileges.
|
||||
|
||||
## Notification of a Vulnerability
|
||||
|
||||
After a fix is provided the security issue will be privately disclosed to the
|
||||
|
||||
218
SUBSYSTEMS.md
Normal file
218
SUBSYSTEMS.md
Normal file
@ -0,0 +1,218 @@
|
||||
# RIOT Subsystem Maintainers
|
||||
|
||||
This file gives an overview about the maintainers of RIOT subsystems. Whenever
|
||||
you submit an issue or a Pull Request, please assign one of the maintainers of
|
||||
the affected modules as an assignee in the issue tracker. The maintainer takes
|
||||
care of either fixing/merging the issue/PR herself or re-assign the issue to a
|
||||
qualified developer.
|
||||
|
||||
**Note**: A developer might maintain more than one subsystem and an issue might
|
||||
affect more than one module.
|
||||
|
||||
# CPU
|
||||
## ESP32, ESP8266
|
||||
|
||||
## MSP430
|
||||
|
||||
- Marian Buschsieweke (@maribu)
|
||||
|
||||
## ARM7
|
||||
|
||||
- Marian Buschsieweke (@maribu)
|
||||
|
||||
## ARM Cortex-M
|
||||
|
||||
### Atmel Sam0 line (SAM D1x/D2x, L1x, L2x, D5x)
|
||||
|
||||
- Benjamin Valentin (@benpicco)
|
||||
- Dylan Laduranty (@dylad)
|
||||
|
||||
## Atmel AVR (Atmega)
|
||||
|
||||
- Marian Buschsieweke (@maribu)
|
||||
|
||||
## Native
|
||||
|
||||
### ZEP radio simulation & ZEP dispatcher
|
||||
|
||||
- Benjamin Valentin (@benpicco)
|
||||
|
||||
# Hardware modules
|
||||
|
||||
## Network devices
|
||||
### IEEE 802.15.4
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### NRF802154
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### CC2538
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### KW2XRF
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### MRF24J40
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### AT86RF2XX
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
#### AT86RF215
|
||||
|
||||
- Benjamin Valentin (@benpicco)
|
||||
|
||||
### BLE
|
||||
|
||||
### LoRa
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### CC110X
|
||||
|
||||
- Marian Buschsieweke (@maribu)
|
||||
|
||||
### ESP-NOW
|
||||
|
||||
## Peripherals
|
||||
|
||||
- Marian Buschsieweke (@maribu)
|
||||
|
||||
## Other drivers
|
||||
|
||||
# Kernel (core)
|
||||
|
||||
- Kaspar Schleiser (@kaspar030)
|
||||
|
||||
# System libraries
|
||||
|
||||
## High-level timer API (xtimer, ztimer)
|
||||
|
||||
- Kaspar Schleiser (@kaspar030)
|
||||
|
||||
## Power Management
|
||||
|
||||
## MTD Subsystem
|
||||
|
||||
- Benjamin Valentin (@benpicco)
|
||||
|
||||
## File Systems
|
||||
|
||||
## USB support
|
||||
|
||||
- Dylan Laduranty (@dylad)
|
||||
|
||||
## POSIX support
|
||||
|
||||
## Scripting languages
|
||||
|
||||
## RUST support
|
||||
|
||||
- Christian Amsüss (@chrysn)
|
||||
- Kaspar Schleiser (@kaspar030)
|
||||
|
||||
## C++ support
|
||||
|
||||
- Marian Buschsieweke (@maribu)
|
||||
|
||||
## Crypto
|
||||
|
||||
# Networking
|
||||
|
||||
## Network stacks
|
||||
### GNRC
|
||||
|
||||
- Martine S. Lenders (@miri64)
|
||||
|
||||
#### 6LowPAN
|
||||
|
||||
- Martine S. Lenders (@miri64)
|
||||
|
||||
#### IPv6
|
||||
|
||||
- Martine S. Lenders (@miri64)
|
||||
|
||||
##### Auto-Subnetting
|
||||
|
||||
- Benjamin Valentin (@benpicco)
|
||||
|
||||
#### Netif
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
#### UDP
|
||||
|
||||
- Martine S. Lenders (@miri64)
|
||||
|
||||
### CCN-Lite
|
||||
|
||||
### OpenThread
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### LWIP
|
||||
|
||||
- Martine S. Lenders (@miri64)
|
||||
|
||||
### OpenWSN
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
## Physical/Link Layer
|
||||
### LoRaWAN
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### BLE (nimble)
|
||||
|
||||
### IEEE 802.15.4
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
## Interfaces
|
||||
### Sock
|
||||
|
||||
- Martine S. Lenders (@miri64)
|
||||
|
||||
### Netif
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
### Netdev
|
||||
|
||||
- José I. Álamos (@jia200x)
|
||||
|
||||
## Application protocols
|
||||
### CoAP
|
||||
|
||||
#### nanoCoAP
|
||||
|
||||
- Benjamin Valentin (@benpicco)
|
||||
|
||||
### MQTT
|
||||
|
||||
### LWM2M
|
||||
|
||||
## Others
|
||||
|
||||
### DTLS
|
||||
|
||||
- Martine S. Lenders (@miri64)
|
||||
|
||||
### RPL
|
||||
|
||||
# Build System
|
||||
|
||||
- Kaspar Schleiser (@kaspar030)
|
||||
|
||||
# Documentation
|
||||
|
||||
# Testing/CI
|
||||
|
||||
- Kaspar Schleiser (@kaspar030)
|
||||
@ -1,15 +0,0 @@
|
||||
# Copyright (c) 2020 HAW Hamburg
|
||||
#
|
||||
# This file is subject to the terms and conditions of the GNU Lesser
|
||||
# General Public License v2.1. See the file LICENSE in the top level
|
||||
# directory for more details.
|
||||
|
||||
config BOARD
|
||||
default "6lowpan-clicker" if BOARD_6LOWPAN_CLICKER
|
||||
|
||||
config BOARD_6LOWPAN_CLICKER
|
||||
bool
|
||||
default y
|
||||
select CPU_MODEL_P32MX470F512H
|
||||
select HAS_PERIPH_TIMER
|
||||
select HAS_PERIPH_UART
|
||||
@ -1,2 +0,0 @@
|
||||
MODULE = board
|
||||
include $(RIOTBASE)/Makefile.base
|
||||
@ -1,5 +0,0 @@
|
||||
ifneq (,$(filter saul_default,$(USEMODULE)))
|
||||
USEMODULE += saul_gpio
|
||||
endif
|
||||
|
||||
USEMODULE += newlib_syscalls_mips_uhi
|
||||
@ -1,6 +0,0 @@
|
||||
CPU = mips_pic32mx
|
||||
CPU_MODEL = p32mx470f512h
|
||||
|
||||
# Put defined MCU peripherals here (in alphabetical order)
|
||||
FEATURES_PROVIDED += periph_timer
|
||||
FEATURES_PROVIDED += periph_uart
|
||||
@ -1,15 +0,0 @@
|
||||
# use pic32prog by default to program this board
|
||||
PROGRAMMER ?= pic32prog
|
||||
PROGRAMMERS_SUPPORTED += pic32prog
|
||||
ifeq ($(PROGRAMMER),pic32prog)
|
||||
# pic32prog
|
||||
#
|
||||
# For PICkit3:
|
||||
#
|
||||
# * Connect the chipKIT-Wi-Fire to USB
|
||||
# * Connect the PICkit3 to ICSP holes
|
||||
# * https://docs.creatordev.io/wifire/guides/wifire-programming/
|
||||
# * The triangle `▶` goes into the port number 1 (a hole with a square around it)
|
||||
# opposite side of the JP1 ICSP text.
|
||||
FLASHFILE ?= $(HEXFILE)
|
||||
endif
|
||||
@ -1,20 +0,0 @@
|
||||
/*
|
||||
* Copyright(C) 2016,2017, Imagination Technologies Limited and/or its
|
||||
* affiliated group companies.
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*
|
||||
*/
|
||||
|
||||
#include "board.h"
|
||||
#include "periph/gpio.h"
|
||||
|
||||
extern void dummy(void);
|
||||
|
||||
void board_init(void)
|
||||
{
|
||||
/* Stop the linker from throwing away the PIC32 config register settings */
|
||||
dummy();
|
||||
}
|
||||
@ -1,95 +0,0 @@
|
||||
/**
|
||||
@defgroup boards_6lowpan-clicker MikroE 6LoWPAN Clicker
|
||||
@ingroup boards
|
||||
@brief Support for the MikroE 6LoWPAN Clicker
|
||||
@deprecated Will not be available after the 2022.07 release. This includes
|
||||
all MIPS based boards and cpus.
|
||||
|
||||
## Overview
|
||||
|
||||
The `6lowpan clicker` is an evaluation board by Mikroe featuring a
|
||||
PIC32MX470F512H, a 6lowpan radio (CA810) by Cascoda and a Mikrobus
|
||||
socket for expansion boards.
|
||||
|
||||
More general information on the board and related documentation can be found
|
||||
[here](https://www.mikroe.com/clicker-6lowpan). Schematics for the board can be
|
||||
found in the [manual](https://download.mikroe.com/documents/starter-boards/clicker/6lowpan/6lowpan-clicker-manual-v100.pdf).
|
||||
|
||||
## Hardware
|
||||
|
||||
### MCU
|
||||
|
||||
| MCU | PIC32MX470F512H |
|
||||
|:---------- |:-------------------- |
|
||||
| Family | PIC32MX (MIPS M4K) |
|
||||
| Vendor | Microchip |
|
||||
| RAM | 128KiB |
|
||||
| Flash | 512KiB |
|
||||
| Frequency | 120MHz |
|
||||
| FPU | no |
|
||||
| Timers | 5 (all 16-bit) |
|
||||
| ADCs | 1x 28-channel 10-bit |
|
||||
| USB 2.0 | 1 |
|
||||
| UARTs | 4 |
|
||||
| SPIs | 2 |
|
||||
| I2Cs | 2 |
|
||||
| RTC | yes |
|
||||
| RNG | no |
|
||||
| Vcc | 2.3V - 3.6V |
|
||||
| Datasheet | [Datasheet](http://ww1.microchip.com/downloads/en/DeviceDoc/PIC32MX330350370430450470_Datasheet_DS60001185H.pdf) |
|
||||
|
||||
|
||||
### User Interface
|
||||
|
||||
2 Buttons:
|
||||
|
||||
| NAME | T1 | T2 |
|
||||
|:----- |:--- |:--- |
|
||||
| Pin | RE7 | RB0 |
|
||||
|
||||
2 LEDs:
|
||||
|
||||
| NAME | LD1 | LD2 |
|
||||
| ----- | --- | --- |
|
||||
| Color | red | red |
|
||||
| Pin | RB1 | RB2 |
|
||||
|
||||
## Implementation Status
|
||||
|
||||
| Device | ID | Supported | Comments |
|
||||
|:---------------- |:--------------- |:--------- |:---------------------- |
|
||||
| MCU | pic32mx470f512h | partly | |
|
||||
| Low-level driver | GPIO | partly | gpio_irq not supported |
|
||||
| | ADC | no | |
|
||||
| | PWM | no | |
|
||||
| | UART | yes | |
|
||||
| | I2C | no | |
|
||||
| | SPI | no | |
|
||||
| | USB | no | |
|
||||
| | RTT | no | |
|
||||
| | RTC | no | |
|
||||
| | Timer | no | |
|
||||
|
||||
## Using UART
|
||||
|
||||
This board doesn't open an UART or serial interface through the USB
|
||||
automatically, and the USB device driver hasn't been implemented to RIOT.
|
||||
Therefore, to open an UART interface one has to connect a usb/ttl converter to
|
||||
the UART3 pins RF5 (RX) and RF4 (TX) available on the Mikrobus socket.
|
||||
|
||||
## Flashing the device
|
||||
|
||||
There are two ways to flash the MCU:
|
||||
* Using MPLAB-IPE and a PICkit 3 (The RIOT build generates a hexfile
|
||||
compatible with MPLAB-IPE)
|
||||
* Using pic32prog and a PICkit 2 or a PICkit 3 (other devices might be
|
||||
supported by pic32prog but were not tested). This is the preferred option
|
||||
as it makes possible to flash the device using `make flash` command.
|
||||
|
||||
## Supported Toolchains
|
||||
|
||||
For using the 6lowpan-clicker board we strongly recommend the usage of the
|
||||
[Codescape GNU Tools](https://codescape.mips.com) toolchain.
|
||||
|
||||
|
||||
*/
|
||||
@ -1,82 +0,0 @@
|
||||
/*
|
||||
* Copyright(C) 2016,2017, Imagination Technologies Limited and/or its
|
||||
* affiliated group companies.
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_6lowpan-clicker
|
||||
* @details
|
||||
* see:
|
||||
* https://www.mikroe.com/clicker-6lowpan
|
||||
* For more information on the board.
|
||||
*
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief board configuration for the MikroE 6LoWPAN Clicker
|
||||
*
|
||||
* @author Neil Jones <Neil.Jones@imgtec.com>
|
||||
*/
|
||||
|
||||
#ifndef BOARD_H
|
||||
#define BOARD_H
|
||||
|
||||
#include "cpu.h"
|
||||
#include "periph_conf.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @brief Set how many increments of the count register per uS
|
||||
* needed by the timer code.
|
||||
*/
|
||||
#define TICKS_PER_US (48)
|
||||
|
||||
/**
|
||||
* @name LED pin configuration
|
||||
* @{
|
||||
*/
|
||||
#define LED1_PIN GPIO_PIN(PORT_B, 1)
|
||||
#define LED2_PIN GPIO_PIN(PORT_B, 2)
|
||||
|
||||
#define LED1_MASK (1 << 1)
|
||||
#define LED2_MASK (1 << 2)
|
||||
|
||||
#define LED1_ON (LATBSET = LED1_MASK)
|
||||
#define LED1_OFF (LATBCLR = LED1_MASK)
|
||||
#define LED1_TOGGLE (LATBINV = LED1_MASK)
|
||||
|
||||
#define LED2_ON (LATBSET = LED2_MASK)
|
||||
#define LED2_OFF (LATBCLR = LED2_MASK)
|
||||
#define LED2_TOGGLE (LATBINV = LED2_MASK)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Button pin configuration
|
||||
* @{
|
||||
*/
|
||||
#define BTN0_PIN GPIO_PIN(PORT_E, 7)
|
||||
#define BTN0_MODE GPIO_IN
|
||||
|
||||
#define BTN1_PIN GPIO_PIN(PORT_B, 0)
|
||||
#define BTN1_MODE GPIO_IN
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @brief Board level initialization
|
||||
*/
|
||||
void board_init(void);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* BOARD_H */
|
||||
/** @} */
|
||||
@ -1,61 +0,0 @@
|
||||
/*
|
||||
* Copyright (C) 2020 Francois Berder
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_6lowpan-clicker
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Configuration of SAUL mapped GPIO pins
|
||||
*
|
||||
* @author Francois Berder <fberder@outlook.fr>
|
||||
*/
|
||||
|
||||
#ifndef GPIO_PARAMS_H
|
||||
#define GPIO_PARAMS_H
|
||||
|
||||
#include "board.h"
|
||||
#include "saul/periph.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @brief GPIO configuration
|
||||
*/
|
||||
static const saul_gpio_params_t saul_gpio_params[] =
|
||||
{
|
||||
{
|
||||
.name = "LD1",
|
||||
.pin = LED1_PIN,
|
||||
.mode = GPIO_OUT,
|
||||
},
|
||||
{
|
||||
.name = "LD2",
|
||||
.pin = LED2_PIN,
|
||||
.mode = GPIO_OUT,
|
||||
},
|
||||
{
|
||||
.name = "T1",
|
||||
.pin = BTN0_PIN,
|
||||
.mode = BTN0_MODE,
|
||||
},
|
||||
{
|
||||
.name = "T2",
|
||||
.pin = BTN1_PIN,
|
||||
.mode = BTN1_MODE,
|
||||
},
|
||||
};
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* GPIO_PARAMS_H */
|
||||
/** @} */
|
||||
@ -1,82 +0,0 @@
|
||||
/*
|
||||
* Copyright(C) 2016,2017, Imagination Technologies Limited and/or its
|
||||
* affiliated group companies.
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_6lowpan-clicker
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief peripheral configuration for the MikroE 6LoWPAN Clicker
|
||||
*
|
||||
* @author Neil Jones <Neil.Jones@imgtec.com>
|
||||
*/
|
||||
|
||||
#ifndef PERIPH_CONF_H
|
||||
#define PERIPH_CONF_H
|
||||
|
||||
#include "cpu.h"
|
||||
#include "macros/units.h"
|
||||
#include "periph_cpu.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @name Clock configurations
|
||||
* @{
|
||||
*/
|
||||
/**
|
||||
* @brief The peripheral clock is required for the UART Baud rate calculation
|
||||
* It is configured by the 'config' registers (see pic32_config_settings.c)
|
||||
* Note 120MHz is the max F for this device.
|
||||
*/
|
||||
#define PERIPHERAL_CLOCK MHZ(96)
|
||||
|
||||
#define CLOCK_CORECLOCK MHZ(120)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Timer definitions
|
||||
* @{
|
||||
*/
|
||||
#define TIMER_NUMOF (1)
|
||||
#define TIMER_0_CHANNELS (3)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name UART Definitions
|
||||
* @{
|
||||
*/
|
||||
static const uart_conf_t uart_config[] = {
|
||||
{ /* UART port available on MikroBus */
|
||||
.base = (volatile unsigned int *)_UART3_BASE_ADDRESS,
|
||||
.clock = PERIPHERAL_CLOCK,
|
||||
.rx_pin = GPIO_PIN(PORT_F, 5),
|
||||
.tx_pin = GPIO_PIN(PORT_F, 4),
|
||||
.rx_mux_reg = &U3RXR,
|
||||
.tx_mux_reg = &RPF4R,
|
||||
.rx_af = GPIO_AF2,
|
||||
.tx_af = GPIO_AF1,
|
||||
.vector = _UART_3_VECTOR,
|
||||
.irq = _UART3_RX_IRQ,
|
||||
},
|
||||
};
|
||||
|
||||
#define UART_0_ISR (isr_usart3)
|
||||
#define UART_NUMOF ((unsigned int)ARRAY_SIZE(uart_config))
|
||||
/** @} */
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* PERIPH_CONF_H */
|
||||
/** @} */
|
||||
@ -1,114 +0,0 @@
|
||||
/*
|
||||
* Copyright(C) 2016,2017, Imagination Technologies Limited and/or its
|
||||
* affiliated group companies.
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*
|
||||
*/
|
||||
|
||||
#include <stdint.h>
|
||||
#include "vendor/p32mx470f512h.h"
|
||||
/*
|
||||
* DEVCFG3 @ 0x1FC02FF0
|
||||
*
|
||||
*
|
||||
* USERID
|
||||
* FSRSSEL 7 Assign IPL 7 to a shadow register set.
|
||||
* PMDLIWAY 1
|
||||
* IOL1WAY 1
|
||||
* FUSBIDIO OFF USB USBID Selection Controlled by Port Function
|
||||
* FVBUSONIO ON VBUSON pin is controlled by the USB module function
|
||||
|
||||
*/
|
||||
volatile uint32_t _DEVCFG3 __attribute__((used, section(".devcfg3"))) =
|
||||
0x0 /* unused bits must be 0 */
|
||||
| (_DEVCFG3_USERID_MASK & 0xFFFF << _DEVCFG3_USERID_POSITION)
|
||||
| (_DEVCFG3_FSRSSEL_MASK & 7 << _DEVCFG3_FSRSSEL_POSITION)
|
||||
| (_DEVCFG3_PMDL1WAY_MASK & 1 << _DEVCFG3_PMDL1WAY_POSITION)
|
||||
| (_DEVCFG3_IOL1WAY_MASK & 1 << _DEVCFG3_IOL1WAY_POSITION)
|
||||
| (_DEVCFG3_FUSBIDIO_MASK & 0 << _DEVCFG3_FUSBIDIO_POSITION)
|
||||
| (_DEVCFG3_FVBUSONIO_MASK & 1 << _DEVCFG3_FVBUSONIO_POSITION);
|
||||
|
||||
/* Note this sets the PLL to 96MHz (8/2 * 24) which is only supported by 3xx
|
||||
* and 4xx parts and assumes an 8MHz XTAL.
|
||||
*
|
||||
* 1xx/2xx/53x/57x only support 50MHz (use 8/2 x 24 / 2 = 48Mhz)
|
||||
* 5xx/6xx/7xx only support 80Mhz (use 8/2 * 20 = 80MHz).
|
||||
*
|
||||
*
|
||||
* DEVCFG2 @ 0x1FC02FF4 (
|
||||
*
|
||||
* FPLLIDIV DIV_2 System PLL Input Divider 2x Divider
|
||||
* FPLLMUL 24x System PLL Multiplier PLL Multiply by 24, 8/2 x 24 = 96MHz
|
||||
* UPLLIDIV DIV_12x USB PLL divider
|
||||
* UPLLEN OFF USB PLL disabled
|
||||
* FPLLODIV DIV_1 System PLL Output Clock Divider 1x Divider
|
||||
*/
|
||||
|
||||
volatile uint32_t _DEVCFG2 __attribute__ ((used, section(".devcfg2"))) =
|
||||
0xffffffff /* unused bits must be 1 */
|
||||
& (~_DEVCFG2_FPLLIDIV_MASK | 1 << _DEVCFG2_FPLLIDIV_POSITION)
|
||||
& (~_DEVCFG2_FPLLMUL_MASK | 7 << _DEVCFG2_FPLLMUL_POSITION)
|
||||
& (~_DEVCFG2_UPLLIDIV_MASK | 7 << _DEVCFG2_UPLLIDIV_POSITION)
|
||||
& (~_DEVCFG2_UPLLEN_MASK | 0 << _DEVCFG2_UPLLEN_POSITION)
|
||||
& (~_DEVCFG2_FPLLODIV_MASK | 0 << _DEVCFG2_FPLLODIV_POSITION);
|
||||
|
||||
/*
|
||||
* DEVCFG1 @ 0x1FC02FF8
|
||||
*
|
||||
* FNOSC PRIPLL Oscillator Selection Bits Primary Osc w/PLL (XT+,HS+,EC+PLL)
|
||||
* FSOSCEN ON Secondary Oscillator Enable Enabled
|
||||
* IESO ON Internal/External Switch Over Enabled
|
||||
* OSCIOFNC OFF CLKO Output Signal Active on the OSCO Pin Disabled
|
||||
* FPBDIV DIV_1 Peripheral Clock Divisor Pb_Clk is Sys_Clk/1
|
||||
* FCKSM CSDCMD Clock Switching and Monitor Selection Clock Switch Disable, FSCM Disabled
|
||||
* WDTPS PS2 Watchdog Timer Postscaler 1:2
|
||||
* WINDIS OFF Watchdog Timer Window Enable Watchdog Timer is in Non-Window Mode
|
||||
* FWDTEN OFF Watchdog Timer Enable WDT Disabled (SWDTEN Bit Controls)
|
||||
* FWDTWINSZ 25%
|
||||
*/
|
||||
|
||||
volatile uint32_t _DEVCFG1 __attribute__ ((used, section(".devcfg1"))) =
|
||||
0xffffffff /* unused bits must be 1 */
|
||||
& (~_DEVCFG1_FNOSC_MASK | 3 << _DEVCFG1_FNOSC_POSITION)
|
||||
& (~_DEVCFG1_FSOSCEN_MASK | 1 << _DEVCFG1_FSOSCEN_POSITION)
|
||||
& (~_DEVCFG1_IESO_MASK | 1 << _DEVCFG1_IESO_POSITION)
|
||||
& (~_DEVCFG1_POSCMOD_MASK | 1 << _DEVCFG1_POSCMOD_POSITION)
|
||||
& (~_DEVCFG1_OSCIOFNC_MASK | 1 << _DEVCFG1_OSCIOFNC_POSITION)
|
||||
& (~_DEVCFG1_FPBDIV_MASK | 0 << _DEVCFG1_FPBDIV_POSITION)
|
||||
& (~_DEVCFG1_FCKSM_MASK | 3 << _DEVCFG1_FCKSM_POSITION)
|
||||
& (~_DEVCFG1_WDTPS_MASK | 1 << _DEVCFG1_WDTPS_POSITION)
|
||||
& (~_DEVCFG1_WINDIS_MASK | 0 << _DEVCFG1_WINDIS_POSITION)
|
||||
& (~_DEVCFG1_FWDTEN_MASK | 0 << _DEVCFG1_FWDTEN_POSITION)
|
||||
& (~_DEVCFG1_FWDTWINSZ_MASK | 3 << _DEVCFG1_FWDTWINSZ_POSITION);
|
||||
|
||||
/*
|
||||
* DEVCFG0 @ 0x1FC02FFC
|
||||
*
|
||||
* DEBUG OFF Background Debugger Enable Debugger is disabled
|
||||
* JTAGEN ON JTAG Enable JTAG Port Enabled
|
||||
* ICESEL ICS_PGx1 CE/ICD Comm Channel Select Communicate on PGEC1/PGED1
|
||||
* PWP OFF Program Flash Write Protect Disable
|
||||
* BWP OFF Boot Flash Write Protect bit Protection Disabled
|
||||
* CP OFF Code Protect Protection Disabled
|
||||
*/
|
||||
|
||||
volatile uint32_t _DEVCFG0 __attribute__ ((used, section(".devcfg0"))) =
|
||||
0x7fffffff /* unused bits must be 1 except MSB which is 0 for some odd reason */
|
||||
& (~_DEVCFG0_DEBUG_MASK | 3 << _DEVCFG0_DEBUG_POSITION)
|
||||
& (~_DEVCFG0_JTAGEN_MASK | 1 << _DEVCFG0_JTAGEN_POSITION)
|
||||
& (~_DEVCFG0_ICESEL_MASK | 3 << _DEVCFG0_ICESEL_POSITION)
|
||||
& (~_DEVCFG0_PWP_MASK | 0xff << _DEVCFG0_PWP_POSITION)
|
||||
& (~_DEVCFG0_BWP_MASK | 1 << _DEVCFG0_BWP_POSITION)
|
||||
& (~_DEVCFG0_CP_MASK | 1 << _DEVCFG0_CP_POSITION);
|
||||
|
||||
/*
|
||||
* Without a reference to this function from elsewhere LD throws the whole
|
||||
* compile unit away even though the data is 'volatile' and 'used' !!!
|
||||
*/
|
||||
void dummy(void)
|
||||
{
|
||||
(void)1;
|
||||
}
|
||||
@ -50,11 +50,6 @@ extern "C" {
|
||||
#define BTN0_MODE GPIO_IN_PU
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @brief Initialize board specific hardware, including clock, LEDs and std-IO
|
||||
*/
|
||||
void board_init(void);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
@ -43,9 +43,21 @@ extern "C" {
|
||||
* @name UART configuration
|
||||
* @{
|
||||
*/
|
||||
#define UART_NUMOF (1U)
|
||||
#define UART_PIN_RX GPIO_PIN(0, 30)
|
||||
#define UART_PIN_TX GPIO_PIN(0, 31)
|
||||
static const uart_conf_t uart_config[] = {
|
||||
{
|
||||
.dev = NRF_UARTE0,
|
||||
.rx_pin = GPIO_PIN(0, 30),
|
||||
.tx_pin = GPIO_PIN(0, 31),
|
||||
#ifdef MODULE_PERIPH_UART_HW_FC
|
||||
.rts_pin = GPIO_UNDEF,
|
||||
.cts_pin = GPIO_UNDEF,
|
||||
#endif
|
||||
.irqn = UARTE0_UART0_IRQn,
|
||||
},
|
||||
};
|
||||
|
||||
#define UART_NUMOF ARRAY_SIZE(uart_config)
|
||||
#define UART_0_ISR (isr_uart0)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
|
||||
@ -25,4 +25,9 @@ config BOARD_ADAFRUIT_CLUE
|
||||
select HAVE_SAUL_GPIO
|
||||
select HAVE_SHT3X
|
||||
|
||||
select MODULE_USB_BOARD_RESET if KCONFIG_USB && TEST_KCONFIG
|
||||
|
||||
config FORCE_USB_STDIO
|
||||
default y
|
||||
|
||||
source "$(RIOTBOARD)/common/nrf52/Kconfig"
|
||||
|
||||
@ -9,10 +9,4 @@ FEATURES_PROVIDED += periph_usbdev
|
||||
# Various other features (if any)
|
||||
FEATURES_PROVIDED += highlevel_stdio
|
||||
|
||||
# This configuration enables modules that are only available when using Kconfig
|
||||
# module modelling
|
||||
ifeq (1,$(TEST_KCONFIG))
|
||||
KCONFIG_BOARD_CONFIG += $(RIOTBOARD)/common/nrf52/nrf52_bootloader.config
|
||||
endif
|
||||
|
||||
include $(RIOTBOARD)/common/nrf52/Makefile.features
|
||||
|
||||
@ -8,18 +8,5 @@ ifeq ($(PROGRAMMER),adafruit-nrfutil)
|
||||
# The preinstalled bootloader must also be taken into account so
|
||||
# ROM_OFFSET skips the space taken by such bootloader.
|
||||
ROM_OFFSET = 0x26000
|
||||
|
||||
ifneq (,$(filter reset flash flash-only, $(MAKECMDGOALS)))
|
||||
# Add 2 seconds delay before opening terminal: this is required when opening
|
||||
# the terminal right after flashing. In this case, the stdio over USB needs
|
||||
# some time after reset before being ready.
|
||||
TERM_DELAY = 2
|
||||
TERMDEPS += term-delay
|
||||
endif
|
||||
include $(RIOTMAKE)/tools/usb_board_reset.mk
|
||||
endif
|
||||
|
||||
term-delay:
|
||||
sleep $(TERM_DELAY)
|
||||
|
||||
TESTRUNNER_CONNECT_DELAY ?= $(TERM_DELAY)
|
||||
$(call target-export-variables,test,TESTRUNNER_CONNECT_DELAY)
|
||||
|
||||
@ -94,7 +94,7 @@ extern "C" {
|
||||
#define BACKLIGHT_MASK (1 << 5) /**< Backlight pin mask */
|
||||
#define BACKLIGHT_ON (NRF_P1->OUTSET = BACKLIGHT_MASK) /**< Turn backlight on */
|
||||
#define BACKLIGHT_OFF (NRF_P1->OUTCLR = BACKLIGHT_MASK) /**< Turn backlight off */
|
||||
/** @ */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Display configuration
|
||||
@ -107,7 +107,8 @@ extern "C" {
|
||||
#define ILI9341_PARAM_NUM_LINES (240U) /**< Number of screen lines */
|
||||
#define ILI9341_PARAM_RGB (1) /**< RGB configuration */
|
||||
#define ILI9341_PARAM_INVERTED (1) /**< Inversion configuration */
|
||||
#define ILI9341_PARAM_ROTATION (ILI9341_ROTATION_HORZ_FLIP) /**< Rotation mode */
|
||||
#define ILI9341_PARAM_ROTATION (ILI9341_ROTATION_VERT) /**< Rotation mode */
|
||||
#define ILI9341_PARAM_OFFSET_X (80) /**< Vertical rotation requires a 80 pixel offset */
|
||||
/** @} */
|
||||
|
||||
#ifdef __cplusplus
|
||||
|
||||
36
boards/adafruit-grand-central-m4-express/Kconfig
Normal file
36
boards/adafruit-grand-central-m4-express/Kconfig
Normal file
@ -0,0 +1,36 @@
|
||||
# Copyright (C) 2023 Gunar Schorcht
|
||||
#
|
||||
# This file is subject to the terms and conditions of the GNU Lesser
|
||||
# General Public License v2.1. See the file LICENSE in the top level
|
||||
# directory for more details.
|
||||
|
||||
config BOARD
|
||||
default "adafruit-grand-central-m4-express" if BOARD_ADAFRUIT_GRAND_CENTRAL_M4_EXPRESS
|
||||
|
||||
config BOARD_ADAFRUIT_GRAND_CENTRAL_M4_EXPRESS
|
||||
bool
|
||||
default y
|
||||
select CPU_MODEL_SAMD51P20A
|
||||
select HAS_ARDUINO_ANALOG
|
||||
select HAS_ARDUINO_PINS
|
||||
select HAS_HIGHLEVEL_STDIO
|
||||
select HAS_PERIPH_ADC
|
||||
select HAS_PERIPH_DAC
|
||||
select HAS_PERIPH_I2C
|
||||
select HAS_PERIPH_PWM
|
||||
select HAS_PERIPH_RTC
|
||||
select HAS_PERIPH_RTT
|
||||
select HAS_PERIPH_SPI
|
||||
select HAS_PERIPH_TIMER
|
||||
select HAS_PERIPH_UART
|
||||
select HAS_PERIPH_USBDEV
|
||||
select HAVE_SAUL_GPIO
|
||||
|
||||
select HAVE_MTD_SPI_NOR
|
||||
# This specific board requires SPI_ON_QSPI for the MTD_SPI_NOR
|
||||
select MODULE_PERIPH_SPI_ON_QSPI if MODULE_MTD_SPI_NOR
|
||||
|
||||
select HAVE_MTD_SDCARD_DEFAULT
|
||||
select MODULE_FATFS_VFS if MODULE_VFS_DEFAULT
|
||||
|
||||
source "$(RIOTBOARD)/common/samdx1-arduino-bootloader/Kconfig"
|
||||
5
boards/adafruit-grand-central-m4-express/Makefile
Normal file
5
boards/adafruit-grand-central-m4-express/Makefile
Normal file
@ -0,0 +1,5 @@
|
||||
MODULE = board
|
||||
|
||||
DIRS = $(RIOTBOARD)/common/samdx1-arduino-bootloader
|
||||
|
||||
include $(RIOTBASE)/Makefile.base
|
||||
19
boards/adafruit-grand-central-m4-express/Makefile.dep
Normal file
19
boards/adafruit-grand-central-m4-express/Makefile.dep
Normal file
@ -0,0 +1,19 @@
|
||||
ifneq (,$(filter saul_default,$(USEMODULE)))
|
||||
USEMODULE += saul_gpio
|
||||
endif
|
||||
|
||||
# default to using fatfs on SD card
|
||||
ifneq (,$(filter vfs_default,$(USEMODULE)))
|
||||
USEPKG += littlefs2
|
||||
USEMODULE += fatfs_vfs
|
||||
USEMODULE += mtd
|
||||
endif
|
||||
|
||||
ifneq (,$(filter mtd,$(USEMODULE)))
|
||||
FEATURES_REQUIRED += periph_spi_on_qspi
|
||||
USEMODULE += mtd_spi_nor
|
||||
USEMODULE += mtd_sdcard_default
|
||||
endif
|
||||
|
||||
# setup the samd21 arduino bootloader related dependencies
|
||||
include $(RIOTBOARD)/common/samdx1-arduino-bootloader/Makefile.dep
|
||||
20
boards/adafruit-grand-central-m4-express/Makefile.features
Normal file
20
boards/adafruit-grand-central-m4-express/Makefile.features
Normal file
@ -0,0 +1,20 @@
|
||||
CPU = samd5x
|
||||
CPU_MODEL = samd51p20a
|
||||
|
||||
# Put defined MCU peripherals here (in alphabetical order)
|
||||
FEATURES_PROVIDED += highlevel_stdio
|
||||
FEATURES_PROVIDED += periph_adc
|
||||
FEATURES_PROVIDED += periph_dac
|
||||
FEATURES_PROVIDED += periph_i2c
|
||||
FEATURES_PROVIDED += periph_pwm
|
||||
FEATURES_PROVIDED += periph_rtc
|
||||
FEATURES_PROVIDED += periph_rtt
|
||||
FEATURES_PROVIDED += periph_spi
|
||||
FEATURES_PROVIDED += periph_timer
|
||||
FEATURES_PROVIDED += periph_uart
|
||||
FEATURES_PROVIDED += periph_usbdev
|
||||
|
||||
# other board features
|
||||
FEATURES_PROVIDED += arduino_analog
|
||||
FEATURES_PROVIDED += arduino_pins
|
||||
FEATURES_PROVIDED += sdcard_spi
|
||||
@ -0,0 +1,6 @@
|
||||
CFLAGS += -DBOOTLOADER_UF2
|
||||
|
||||
# Include all definitions for flashing with bossa other USB
|
||||
include $(RIOTBOARD)/common/samdx1-arduino-bootloader/Makefile.include
|
||||
# Include handling of serial and non-bossa programmers (if selected by user)
|
||||
include $(RIOTMAKE)/boards/sam0.inc.mk
|
||||
68
boards/adafruit-grand-central-m4-express/board.c
Normal file
68
boards/adafruit-grand-central-m4-express/board.c
Normal file
@ -0,0 +1,68 @@
|
||||
/*
|
||||
* Copyright (C) 2021 ML!PA Consulting GmbH
|
||||
* 2023 Gunar Schorcht
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-grand-central-m4-express
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board specific implementations for the Adafruit Grand Central M4 Express
|
||||
*
|
||||
* @author Benjamin Valentin <benjamin.valentin@ml-pa.com>
|
||||
* @author Gunar Schorcht <gunar@schorcht.net>
|
||||
* @}
|
||||
*/
|
||||
|
||||
#include "board.h"
|
||||
#include "periph/gpio.h"
|
||||
#include "timex.h"
|
||||
#ifdef MODULE_VFS_DEFAULT
|
||||
#include "vfs_default.h"
|
||||
#endif
|
||||
|
||||
#ifdef MODULE_MTD_SPI_NOR
|
||||
|
||||
#include "mtd_spi_nor.h"
|
||||
|
||||
/* GD25Q64 */
|
||||
static const mtd_spi_nor_params_t _samd51_nor_params = {
|
||||
.opcode = &mtd_spi_nor_opcode_default,
|
||||
.wait_chip_erase = 25 * US_PER_SEC,
|
||||
.wait_32k_erase = 150 * US_PER_MS,
|
||||
.wait_64k_erase = 200 * US_PER_MS,
|
||||
.wait_sector_erase = 50 * US_PER_MS,
|
||||
.wait_chip_wake_up = 10 * US_PER_MS,
|
||||
.clk = MHZ(54),
|
||||
.flag = SPI_NOR_F_SECT_4K
|
||||
| SPI_NOR_F_SECT_32K
|
||||
| SPI_NOR_F_SECT_64K,
|
||||
.spi = SPI_DEV(2),
|
||||
.mode = SPI_MODE_0,
|
||||
.cs = SAM0_QSPI_PIN_CS,
|
||||
.wp = SAM0_QSPI_PIN_DATA_2,
|
||||
.hold = SAM0_QSPI_PIN_DATA_3,
|
||||
};
|
||||
|
||||
static mtd_spi_nor_t samd51_nor_dev = {
|
||||
.base = {
|
||||
.driver = &mtd_spi_nor_driver,
|
||||
.sector_count = 2048,
|
||||
.page_size = 256,
|
||||
.pages_per_sector = 16,
|
||||
},
|
||||
.params = &_samd51_nor_params,
|
||||
};
|
||||
|
||||
MTD_XFA_ADD(samd51_nor_dev, 0);
|
||||
|
||||
#ifdef MODULE_VFS_DEFAULT
|
||||
VFS_AUTO_MOUNT(littlefs2, VFS_MTD(samd51_nor_dev), VFS_DEFAULT_NVM(0), 0);
|
||||
#endif
|
||||
|
||||
#endif /* MODULE_MTD_SPI_NOR */
|
||||
44
boards/adafruit-grand-central-m4-express/doc.txt
Normal file
44
boards/adafruit-grand-central-m4-express/doc.txt
Normal file
@ -0,0 +1,44 @@
|
||||
/**
|
||||
@defgroup boards_adafruit-grand-central-m4-express Adafruit Grand Central M4 Express
|
||||
@ingroup boards
|
||||
@brief Support for the Adafruit Grand Central M4 Express
|
||||
|
||||
### General information
|
||||
|
||||

|
||||
|
||||
The main features of the board are:
|
||||
- ATSAMD51 Cortex M4 running at 120 MHz
|
||||
- Hardware DSP and floating point support
|
||||
- 1MB Flash
|
||||
- 256 KB RAM
|
||||
- external 8 MB QSPI Flash storage
|
||||
- 32-bit, 3.3V logic and power
|
||||
- Micro SD Card slot connected to SPI
|
||||
- native USB
|
||||
|
||||
### Links
|
||||
|
||||
- [Overview](https://learn.adafruit.com/adafruit-grand-central)
|
||||
- [Schematics](https://learn.adafruit.com/assets/69175)
|
||||
|
||||
### Flash the board
|
||||
|
||||
The board is flashed using its on-board
|
||||
[boot loader](https://github.com/adafruit/uf2-samdx1).
|
||||
|
||||
The process is automated in the usual `make flash` target.
|
||||
|
||||
If RIOT is already running on the board, it will automatically reset the CPU
|
||||
and enter the bootloader. If some other firmware is running or RIOT crashed,
|
||||
you need to enter the bootloader manually by double tapping the board's reset
|
||||
button.
|
||||
|
||||
Readiness of the bootloader is indicated by LED pulsing in red.
|
||||
|
||||
### Accessing STDIO
|
||||
|
||||
The usual way to obtain a console on this board is using an emulated USB serial
|
||||
port.
|
||||
|
||||
*/
|
||||
@ -0,0 +1,93 @@
|
||||
/*
|
||||
* Copyright (C) 2023 Gunar Schorcht
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-grand-central-m4-express
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Mapping from MCU pins to Arduino pins
|
||||
*
|
||||
* @author Gunar Schorcht <gunar@schorcht.net>
|
||||
*/
|
||||
|
||||
#ifndef ARDUINO_IOMAP_H
|
||||
#define ARDUINO_IOMAP_H
|
||||
|
||||
#include "periph/gpio.h"
|
||||
#include "periph/adc.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @name Mapping of MCU pins to Arduino pins
|
||||
* @{
|
||||
*/
|
||||
#define ARDUINO_PIN_0 GPIO_PIN(PB, 25)
|
||||
#define ARDUINO_PIN_1 GPIO_PIN(PB, 24)
|
||||
#define ARDUINO_PIN_2 GPIO_PIN(PC, 18)
|
||||
#define ARDUINO_PIN_3 GPIO_PIN(PC, 19)
|
||||
#define ARDUINO_PIN_4 GPIO_PIN(PC, 20)
|
||||
#define ARDUINO_PIN_5 GPIO_PIN(PC, 21)
|
||||
#define ARDUINO_PIN_6 GPIO_PIN(PD, 20)
|
||||
#define ARDUINO_PIN_7 GPIO_PIN(PD, 21)
|
||||
|
||||
#define ARDUINO_PIN_8 GPIO_PIN(PB, 18)
|
||||
#define ARDUINO_PIN_9 GPIO_PIN(PB, 02)
|
||||
#define ARDUINO_PIN_10 GPIO_PIN(PB, 22)
|
||||
#define ARDUINO_PIN_11 GPIO_PIN(PB, 23)
|
||||
#define ARDUINO_PIN_12 GPIO_PIN(PB, 00)
|
||||
#define ARDUINO_PIN_13 GPIO_PIN(PB, 01)
|
||||
|
||||
#define ARDUINO_PIN_14 GPIO_PIN(PB, 20)
|
||||
#define ARDUINO_PIN_15 GPIO_PIN(PB, 21)
|
||||
|
||||
#define ARDUINO_PIN_16 GPIO_PIN(PA, 3)
|
||||
#define ARDUINO_PIN_17 GPIO_PIN(PC, 0)
|
||||
#define ARDUINO_PIN_18 GPIO_PIN(PC, 3)
|
||||
#define ARDUINO_PIN_19 GPIO_PIN(PC, 1)
|
||||
#define ARDUINO_PIN_20 GPIO_PIN(PC, 4)
|
||||
#define ARDUINO_PIN_21 GPIO_PIN(PC, 5)
|
||||
|
||||
#define ARDUINO_PIN_LAST 21
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Aliases for analog pins
|
||||
* @{
|
||||
*/
|
||||
#define ARDUINO_PIN_A0 ARDUINO_PIN_16
|
||||
#define ARDUINO_PIN_A1 ARDUINO_PIN_17
|
||||
#define ARDUINO_PIN_A2 ARDUINO_PIN_18
|
||||
#define ARDUINO_PIN_A3 ARDUINO_PIN_19
|
||||
#define ARDUINO_PIN_A4 ARDUINO_PIN_20
|
||||
#define ARDUINO_PIN_A5 ARDUINO_PIN_21
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Mapping of Arduino analog pins to RIOT ADC lines
|
||||
* @{
|
||||
*/
|
||||
#define ARDUINO_A0 ADC_LINE(0)
|
||||
#define ARDUINO_A1 ADC_LINE(1)
|
||||
#define ARDUINO_A2 ADC_LINE(2)
|
||||
#define ARDUINO_A3 ADC_LINE(3)
|
||||
#define ARDUINO_A4 ADC_LINE(4)
|
||||
#define ARDUINO_A5 ADC_LINE(5)
|
||||
|
||||
#define ARDUINO_ANALOG_PIN_LAST 5
|
||||
/** @} */
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* ARDUINO_IOMAP_H */
|
||||
/** @} */
|
||||
96
boards/adafruit-grand-central-m4-express/include/board.h
Normal file
96
boards/adafruit-grand-central-m4-express/include/board.h
Normal file
@ -0,0 +1,96 @@
|
||||
/*
|
||||
* Copyright (C) 2023 Gunar Schorcht
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-grand-central-m4-express
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board specific definitions for the Adafruit Grand Central M4 Express
|
||||
*
|
||||
* @author Gunar Schorcht <gunar@schorcht.net>
|
||||
*/
|
||||
|
||||
#ifndef BOARD_H
|
||||
#define BOARD_H
|
||||
|
||||
#include "cpu.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @name LED pin definitions and handlers
|
||||
* @{
|
||||
*/
|
||||
|
||||
#define LED0_PIN GPIO_PIN(PB, 1) /**< User LED red (D13) */
|
||||
#define LED1_PIN GPIO_PIN(PC, 30) /**< TX LED yellow */
|
||||
#define LED2_PIN GPIO_PIN(PC, 31) /**< RX LED yellow */
|
||||
|
||||
#define LED0_PORT PORT->Group[PB] /**< Port of User LED red (D13) */
|
||||
#define LED0_MASK (1 << 1) /**< Mask of User LED red (D13) */
|
||||
#define LED1_PORT PORT->Group[PC] /**< Port of TX LED yellow */
|
||||
#define LED1_MASK (1 << 30) /**< Mask of TX LED yellow */
|
||||
#define LED2_PORT PORT->Group[PC] /**< Port of RX LED yellow */
|
||||
#define LED2_MASK (1 << 31) /**< Mask of RX LED yellow */
|
||||
|
||||
#define LED0_ON (LED0_PORT.OUTSET.reg = LED0_MASK) /**< Switch on User LED red (D13) */
|
||||
#define LED0_OFF (LED0_PORT.OUTCLR.reg = LED0_MASK) /**< Switch off User LED red (D13) */
|
||||
#define LED0_TOGGLE (LED0_PORT.OUTTGL.reg = LED0_MASK) /**< Toggle User LED red (D13) */
|
||||
|
||||
#define LED1_ON (LED1_PORT.OUTCLR.reg = LED1_MASK) /**< Switch on TX LED yellow */
|
||||
#define LED1_OFF (LED1_PORT.OUTSET.reg = LED1_MASK) /**< Switch off TX LED yellow */
|
||||
#define LED1_TOGGLE (LED1_PORT.OUTTGL.reg = LED1_MASK) /**< Toggle TX LED yellow */
|
||||
|
||||
#define LED2_ON (LED2_PORT.OUTCLR.reg = LED2_MASK) /**< Switch on RX LED yellow */
|
||||
#define LED2_OFF (LED2_PORT.OUTSET.reg = LED2_MASK) /**< Switch off RX LED yellow */
|
||||
#define LED2_TOGGLE (LED2_PORT.OUTTGL.reg = LED2_MASK) /**< Toggle User RX LED yellow */
|
||||
|
||||
#ifndef WS281X_PARAM_PIN
|
||||
#define WS281X_PARAM_PIN GPIO_PIN(PC, 24) /**< GPIO pin connected to the data pin */
|
||||
#endif
|
||||
#ifndef WS281X_PARAM_NUMOF
|
||||
#define WS281X_PARAM_NUMOF (1U) /**< Number of LEDs chained */
|
||||
#endif
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name MTD configuration
|
||||
* @{
|
||||
*/
|
||||
#define MTD_0 mtd_dev_get(0) /**< MTD device for the 8 MByte QSPI Flash */
|
||||
#define MTD_1 mtd_dev_get(1) /**< MTD device for the SD Card */
|
||||
|
||||
#define CONFIG_SDCARD_GENERIC_MTD_OFFSET 1 /**< MTD_1 is used for SD Card */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name SD-Card interface configuration
|
||||
*
|
||||
* The SD-Card interface is connected to SPI_DEV(1).
|
||||
*
|
||||
* @{
|
||||
*/
|
||||
#if MODULE_SDCARD_SPI || DOXYGEN
|
||||
#define SDCARD_SPI_PARAM_SPI SPI_DEV(1)
|
||||
#define SDCARD_SPI_PARAM_CLK GPIO_PIN(PB, 27)
|
||||
#define SDCARD_SPI_PARAM_MOSI GPIO_PIN(PB, 26)
|
||||
#define SDCARD_SPI_PARAM_MISO GPIO_PIN(PB, 29)
|
||||
#define SDCARD_SPI_PARAM_CS GPIO_PIN(PB, 28)
|
||||
#define SDCARD_SPI_PARAM_POWER GPIO_UNDEF
|
||||
#endif
|
||||
/** @} */
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* BOARD_H */
|
||||
/** @} */
|
||||
@ -0,0 +1,59 @@
|
||||
/*
|
||||
* Copyright (C) 2023 Gunar Schorcht
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-grand-central-m4-express
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board specific configuration of direct mapped GPIOs
|
||||
*
|
||||
* @author Gunar Schorcht <gunar@schorcht.net>
|
||||
*/
|
||||
|
||||
#ifndef GPIO_PARAMS_H
|
||||
#define GPIO_PARAMS_H
|
||||
|
||||
#include "board.h"
|
||||
#include "saul/periph.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @brief GPIO pin configuration
|
||||
*/
|
||||
static const saul_gpio_params_t saul_gpio_params[] =
|
||||
{
|
||||
{
|
||||
.name = "LED User (red)",
|
||||
.pin = LED0_PIN,
|
||||
.mode = GPIO_OUT,
|
||||
.flags = SAUL_GPIO_INIT_CLEAR,
|
||||
},
|
||||
{
|
||||
.name = "LED TX (yellow)",
|
||||
.pin = LED1_PIN,
|
||||
.mode = GPIO_OUT,
|
||||
.flags = SAUL_GPIO_INVERTED | SAUL_GPIO_INIT_CLEAR,
|
||||
},
|
||||
{
|
||||
.name = "LED RX (yellow)",
|
||||
.pin = LED2_PIN,
|
||||
.mode = GPIO_OUT,
|
||||
.flags = SAUL_GPIO_INVERTED | SAUL_GPIO_INIT_CLEAR,
|
||||
},
|
||||
};
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* GPIO_PARAMS_H */
|
||||
/** @} */
|
||||
342
boards/adafruit-grand-central-m4-express/include/periph_conf.h
Normal file
342
boards/adafruit-grand-central-m4-express/include/periph_conf.h
Normal file
@ -0,0 +1,342 @@
|
||||
/*
|
||||
* Copyright (C) 2021 ML!PA Consulting GmbH
|
||||
* 2023 Gunar Schorcht
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-grand-central-m4-express
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Configuration of CPU peripherals for the Adafruit Grand Central M4 Express
|
||||
*
|
||||
* @author Benjamin Valentin <benjamin.valentin@ml-pa.com>
|
||||
* @author Gunar Schorcht <gunar@schorcht.net>
|
||||
*/
|
||||
|
||||
#ifndef PERIPH_CONF_H
|
||||
#define PERIPH_CONF_H
|
||||
|
||||
#include "periph_cpu.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @name Core clock frequency
|
||||
* @{
|
||||
*/
|
||||
#ifndef CLOCK_CORECLOCK
|
||||
#define CLOCK_CORECLOCK MHZ(120)
|
||||
#endif
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name 32kHz Oscillator configuration
|
||||
* @{
|
||||
*/
|
||||
#define EXTERNAL_OSC32_SOURCE 1
|
||||
#define INTERNAL_OSC32_SOURCE 0
|
||||
#define ULTRA_LOW_POWER_INTERNAL_OSC_SOURCE 0
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @brief Enable the internal DC/DC converter
|
||||
* The board is equipped with L_EXT (L1) of 10uH at VSW pin.
|
||||
*/
|
||||
#define USE_VREG_BUCK (1)
|
||||
|
||||
/**
|
||||
* @name ADC Configuration
|
||||
* @{
|
||||
*/
|
||||
|
||||
/* ADC Default values */
|
||||
#define ADC_PRESCALER ADC_CTRLA_PRESCALER_DIV128
|
||||
|
||||
#define ADC_NEG_INPUT ADC_INPUTCTRL_MUXNEG(0x18u)
|
||||
#define ADC_REF_DEFAULT ADC_REFCTRL_REFSEL_INTVCC1
|
||||
|
||||
static const adc_conf_chan_t adc_channels[] = {
|
||||
/* port, pin, muxpos, dev */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA02, .dev = ADC0 }, /* A0 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA05, .dev = ADC0 }, /* A1 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PB03, .dev = ADC0 }, /* A2 */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PC00, .dev = ADC1 }, /* A3 */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PC01, .dev = ADC1 }, /* A4 */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PC02, .dev = ADC1 }, /* A5 */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PC03, .dev = ADC1 }, /* A6 */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PB04, .dev = ADC1 }, /* A7 */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PB05, .dev = ADC1 }, /* A8 */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PB06, .dev = ADC1 }, /* A9 */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PB07, .dev = ADC1 }, /* A10 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PB08, .dev = ADC0 }, /* A11 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PB09, .dev = ADC0 }, /* A12 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA04, .dev = ADC0 }, /* A13 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA06, .dev = ADC0 }, /* A14 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA07, .dev = ADC0 }, /* A15 */
|
||||
};
|
||||
|
||||
#define ADC_NUMOF ARRAY_SIZE(adc_channels)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name DAC configuration
|
||||
* @{
|
||||
*/
|
||||
/* Must not exceed 12 MHz */
|
||||
#define DAC_CLOCK SAM0_GCLK_TIMER
|
||||
/* Use external reference voltage on PA03 */
|
||||
/* (You have to manually connect PA03 with Vcc) */
|
||||
/* Internal reference only gives 1V */
|
||||
#define DAC_VREF DAC_CTRLB_REFSEL_VREFPU
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name I2C configuration
|
||||
* @{
|
||||
*/
|
||||
static const i2c_conf_t i2c_config[] = {
|
||||
{
|
||||
.dev = &(SERCOM3->I2CM),
|
||||
.speed = I2C_SPEED_NORMAL,
|
||||
.scl_pin = GPIO_PIN(PB, 21), /* D21 (SCL) */
|
||||
.sda_pin = GPIO_PIN(PB, 20), /* D20 (SDA) */
|
||||
.mux = GPIO_MUX_C,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
.flags = I2C_FLAG_NONE
|
||||
},
|
||||
{
|
||||
.dev = &(SERCOM6->I2CM),
|
||||
.speed = I2C_SPEED_NORMAL,
|
||||
.scl_pin = GPIO_PIN(PC, 17), /* D24 */
|
||||
.sda_pin = GPIO_PIN(PC, 16), /* D25 */
|
||||
.mux = GPIO_MUX_C,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
.flags = I2C_FLAG_NONE
|
||||
},
|
||||
};
|
||||
|
||||
#define I2C_NUMOF ARRAY_SIZE(i2c_config)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name PWM configuration
|
||||
* @{
|
||||
*/
|
||||
#define PWM_0_EN 1
|
||||
|
||||
#if PWM_0_EN
|
||||
/* PWM0 channels */
|
||||
static const pwm_conf_chan_t pwm_chan0_config[] = {
|
||||
/* GPIO pin, MUX value, TCC channel */
|
||||
{ GPIO_PIN(PA, 22), GPIO_MUX_G, 2 },
|
||||
};
|
||||
#endif
|
||||
|
||||
/* PWM device configuration */
|
||||
static const pwm_conf_t pwm_config[] = {
|
||||
#if PWM_0_EN
|
||||
{ .tim = TCC_CONFIG(TCC0),
|
||||
.chan = pwm_chan0_config,
|
||||
.chan_numof = ARRAY_SIZE(pwm_chan0_config),
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
},
|
||||
#endif
|
||||
};
|
||||
|
||||
/* number of devices that are actually defined */
|
||||
#define PWM_NUMOF ARRAY_SIZE(pwm_config)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name RTT configuration
|
||||
* @{
|
||||
*/
|
||||
#ifndef RTT_FREQUENCY
|
||||
#define RTT_FREQUENCY (32768U)
|
||||
#endif
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Timer peripheral configuration
|
||||
* @{
|
||||
*/
|
||||
static const tc32_conf_t timer_config[] = {
|
||||
{ /* Timer 0 - System Clock */
|
||||
.dev = TC0,
|
||||
.irq = TC0_IRQn,
|
||||
.mclk = &MCLK->APBAMASK.reg,
|
||||
.mclk_mask = MCLK_APBAMASK_TC0 | MCLK_APBAMASK_TC1,
|
||||
.gclk_id = TC0_GCLK_ID,
|
||||
.gclk_src = SAM0_GCLK_TIMER,
|
||||
.flags = TC_CTRLA_MODE_COUNT32,
|
||||
},
|
||||
{ /* Timer 1 */
|
||||
.dev = TC2,
|
||||
.irq = TC2_IRQn,
|
||||
.mclk = &MCLK->APBBMASK.reg,
|
||||
.mclk_mask = MCLK_APBBMASK_TC2 | MCLK_APBBMASK_TC3,
|
||||
.gclk_id = TC2_GCLK_ID,
|
||||
.gclk_src = SAM0_GCLK_TIMER,
|
||||
.flags = TC_CTRLA_MODE_COUNT32,
|
||||
}
|
||||
};
|
||||
|
||||
/* Timer 0 configuration */
|
||||
#define TIMER_0_CHANNELS 2
|
||||
#define TIMER_0_ISR isr_tc0
|
||||
|
||||
/* Timer 1 configuration */
|
||||
#define TIMER_1_CHANNELS 2
|
||||
#define TIMER_1_ISR isr_tc2
|
||||
|
||||
#define TIMER_NUMOF ARRAY_SIZE(timer_config)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name SPI configuration
|
||||
* @{
|
||||
*/
|
||||
static const spi_conf_t spi_config[] = {
|
||||
{ /* SPI on XIO connector */
|
||||
.dev = &(SERCOM7->SPI),
|
||||
.miso_pin = GPIO_PIN(PD, 11), /* D50 MISO */
|
||||
.mosi_pin = GPIO_PIN(PD, 8), /* D51 MOSI */
|
||||
.clk_pin = GPIO_PIN(PD, 9), /* D52 SCK */
|
||||
.miso_mux = GPIO_MUX_C,
|
||||
.mosi_mux = GPIO_MUX_C,
|
||||
.clk_mux = GPIO_MUX_C,
|
||||
.miso_pad = SPI_PAD_MISO_3,
|
||||
.mosi_pad = SPI_PAD_MOSI_0_SCK_1,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
#ifdef MODULE_PERIPH_DMA
|
||||
.tx_trigger = SERCOM7_DMAC_ID_TX,
|
||||
.rx_trigger = SERCOM7_DMAC_ID_RX,
|
||||
#endif
|
||||
},
|
||||
{ /* SD Card */
|
||||
.dev = &(SERCOM2->SPI),
|
||||
.miso_pin = GPIO_PIN(PB, 29),
|
||||
.mosi_pin = GPIO_PIN(PB, 26),
|
||||
.clk_pin = GPIO_PIN(PB, 27),
|
||||
.miso_mux = GPIO_MUX_C,
|
||||
.mosi_mux = GPIO_MUX_C,
|
||||
.clk_mux = GPIO_MUX_C,
|
||||
.miso_pad = SPI_PAD_MISO_3,
|
||||
.mosi_pad = SPI_PAD_MOSI_0_SCK_1,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
#ifdef MODULE_PERIPH_DMA
|
||||
.tx_trigger = SERCOM2_DMAC_ID_TX,
|
||||
.rx_trigger = SERCOM2_DMAC_ID_RX,
|
||||
#endif
|
||||
},
|
||||
#ifdef MODULE_PERIPH_SPI_ON_QSPI
|
||||
{ /* QSPI in SPI mode */
|
||||
.dev = QSPI,
|
||||
.miso_pin = SAM0_QSPI_PIN_DATA_1,
|
||||
.mosi_pin = SAM0_QSPI_PIN_DATA_0,
|
||||
.clk_pin = SAM0_QSPI_PIN_CLK,
|
||||
.miso_mux = SAM0_QSPI_MUX,
|
||||
.mosi_mux = SAM0_QSPI_MUX,
|
||||
.clk_mux = SAM0_QSPI_MUX,
|
||||
.miso_pad = SPI_PAD_MISO_0, /* unused */
|
||||
.mosi_pad = SPI_PAD_MOSI_0_SCK_1, /* unused */
|
||||
.gclk_src = SAM0_GCLK_MAIN, /* unused */
|
||||
#ifdef MODULE_PERIPH_DMA
|
||||
.tx_trigger = QSPI_DMAC_ID_TX,
|
||||
.rx_trigger = QSPI_DMAC_ID_RX,
|
||||
#endif
|
||||
},
|
||||
#endif
|
||||
};
|
||||
|
||||
#define SPI_NUMOF ARRAY_SIZE(spi_config)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name USB peripheral configuration
|
||||
* @{
|
||||
*/
|
||||
static const sam0_common_usb_config_t sam_usbdev_config[] = {
|
||||
{
|
||||
.dm = GPIO_PIN(PA, 24),
|
||||
.dp = GPIO_PIN(PA, 25),
|
||||
.d_mux = GPIO_MUX_H,
|
||||
.device = &USB->DEVICE,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
}
|
||||
};
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name UART configuration
|
||||
* @{
|
||||
*/
|
||||
static const uart_conf_t uart_config[] = {
|
||||
{
|
||||
.dev = &SERCOM0->USART,
|
||||
.rx_pin = GPIO_PIN(PB, 25), /* D0 (UART0_RX) */
|
||||
.tx_pin = GPIO_PIN(PB, 24), /* D1 (UART0_TX) */
|
||||
#ifdef MODULE_PERIPH_UART_HW_FC
|
||||
.rts_pin = GPIO_UNDEF,
|
||||
.cts_pin = GPIO_UNDEF,
|
||||
#endif
|
||||
.mux = GPIO_MUX_C,
|
||||
.rx_pad = UART_PAD_RX_1,
|
||||
.tx_pad = UART_PAD_TX_0,
|
||||
.flags = UART_FLAG_NONE,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
},
|
||||
{
|
||||
.dev = &SERCOM4->USART,
|
||||
.rx_pin = GPIO_PIN(PB, 13), /* D19 (UART2_RX) */
|
||||
.tx_pin = GPIO_PIN(PB, 12), /* D18 (UART2_TX) */
|
||||
#ifdef MODULE_PERIPH_UART_HW_FC
|
||||
.rts_pin = GPIO_UNDEF,
|
||||
.cts_pin = GPIO_UNDEF,
|
||||
#endif
|
||||
.mux = GPIO_MUX_C,
|
||||
.rx_pad = UART_PAD_RX_1,
|
||||
.tx_pad = UART_PAD_TX_0,
|
||||
.flags = UART_FLAG_NONE,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
},
|
||||
{
|
||||
.dev = &SERCOM1->USART,
|
||||
.rx_pin = GPIO_PIN(PC, 23), /* D17 (UART2_RX) */
|
||||
.tx_pin = GPIO_PIN(PC, 22), /* D16 (UART2_TX) */
|
||||
#ifdef MODULE_PERIPH_UART_HW_FC
|
||||
.rts_pin = GPIO_UNDEF,
|
||||
.cts_pin = GPIO_UNDEF,
|
||||
#endif
|
||||
.mux = GPIO_MUX_C,
|
||||
.rx_pad = UART_PAD_RX_1,
|
||||
.tx_pad = UART_PAD_TX_0,
|
||||
.flags = UART_FLAG_NONE,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
},
|
||||
};
|
||||
|
||||
/* interrupt function name mapping */
|
||||
#define UART_0_ISR isr_sercom0_2
|
||||
#define UART_0_ISR_TX isr_sercom0_0
|
||||
#define UART_1_ISR isr_sercom4_2
|
||||
#define UART_1_ISR_TX isr_sercom4_0
|
||||
#define UART_2_ISR isr_sercom1_2
|
||||
#define UART_2_ISR_TX isr_sercom1_0
|
||||
|
||||
#define UART_NUMOF ARRAY_SIZE(uart_config)
|
||||
/** @} */
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* PERIPH_CONF_H */
|
||||
/** @} */
|
||||
@ -7,5 +7,11 @@ ifneq (,$(filter mtd,$(USEMODULE)))
|
||||
USEMODULE += mtd_spi_nor
|
||||
endif
|
||||
|
||||
# default to using littlefs2 on the external flash
|
||||
ifneq (,$(filter vfs_default,$(USEMODULE)))
|
||||
USEPKG += littlefs2
|
||||
USEMODULE += mtd
|
||||
endif
|
||||
|
||||
# setup the samd21 arduino bootloader related dependencies
|
||||
include $(RIOTBOARD)/common/samdx1-arduino-bootloader/Makefile.dep
|
||||
|
||||
@ -13,9 +13,3 @@ FEATURES_PROVIDED += periph_spi
|
||||
FEATURES_PROVIDED += periph_timer
|
||||
FEATURES_PROVIDED += periph_uart
|
||||
FEATURES_PROVIDED += periph_usbdev
|
||||
|
||||
# This configuration enables modules that are only available when using Kconfig
|
||||
# module modelling
|
||||
ifeq (1, $(TEST_KCONFIG))
|
||||
KCONFIG_ADD_CONFIG += $(RIOTBOARD)/common/samdx1-arduino-bootloader/samdx1-arduino-bootloader.config
|
||||
endif
|
||||
|
||||
@ -21,6 +21,9 @@
|
||||
#include "periph/gpio.h"
|
||||
#include "mtd_spi_nor.h"
|
||||
#include "timex.h"
|
||||
#ifdef MODULE_VFS_DEFAULT
|
||||
#include "vfs_default.h"
|
||||
#endif
|
||||
|
||||
#ifdef MODULE_MTD
|
||||
/* GD25x16 */
|
||||
@ -51,5 +54,45 @@ static mtd_spi_nor_t samd51_nor_dev = {
|
||||
.params = &_samd51_nor_params,
|
||||
};
|
||||
|
||||
mtd_dev_t *mtd0 = (mtd_dev_t *)&samd51_nor_dev;
|
||||
MTD_XFA_ADD(samd51_nor_dev, 0);
|
||||
|
||||
#ifdef MODULE_VFS_DEFAULT
|
||||
VFS_AUTO_MOUNT(littlefs2, VFS_MTD(samd51_nor_dev), VFS_DEFAULT_NVM(0), 0);
|
||||
#endif
|
||||
#endif /* MODULE_MTD */
|
||||
|
||||
static inline void _toggle(unsigned n)
|
||||
{
|
||||
n *= 2;
|
||||
while (--n) {
|
||||
/* This might break if the GPIO driver gets more optimized, but
|
||||
* with the current implementation the toggle is slow enough :) */
|
||||
gpio_toggle(APA102_PARAM_CLK_PIN);
|
||||
}
|
||||
}
|
||||
|
||||
void board_init(void)
|
||||
{
|
||||
/* if the real driver is used, it will deal with the LED */
|
||||
if (IS_USED(MODULE_APA102)) {
|
||||
return;
|
||||
}
|
||||
|
||||
/* bootloader leaves on an annoyingly bright LED - turn it off manually */
|
||||
gpio_init(APA102_PARAM_DATA_PIN, GPIO_OUT);
|
||||
gpio_init(APA102_PARAM_CLK_PIN, GPIO_OUT);
|
||||
|
||||
/* start frame - 32 zero bits */
|
||||
gpio_clear(APA102_PARAM_DATA_PIN);
|
||||
_toggle(32);
|
||||
|
||||
/* LED frame: 3 start bits (1), 5 alpha bits (0), 24 color bits (0) */
|
||||
gpio_set(APA102_PARAM_DATA_PIN);
|
||||
_toggle(3);
|
||||
gpio_clear(APA102_PARAM_DATA_PIN);
|
||||
_toggle(29); /* 5 alpha + 8 red + 8 green + 8 blue */
|
||||
|
||||
/* end frame - 32 one bits */
|
||||
gpio_set(APA102_PARAM_DATA_PIN);
|
||||
_toggle(32);
|
||||
}
|
||||
|
||||
@ -7,7 +7,7 @@
|
||||
|
||||

|
||||
|
||||
This is a small formfactor (only 1.4" long by 0.7" wide) SAM D51 board made by Adafruit.
|
||||
This is a small formfactor (only 1.4\" long by 0.7\" wide) SAM D51 board made by Adafruit.
|
||||
|
||||
The board features one red LED (LD1), one DotStar / APA102 RGB LED, a reset button as well as
|
||||
21 configurable external pins(6 of which can be analog in).
|
||||
|
||||
@ -20,7 +20,6 @@
|
||||
#define BOARD_H
|
||||
|
||||
#include "cpu.h"
|
||||
#include "mtd.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
@ -53,8 +52,7 @@ extern "C" {
|
||||
* @name MTD configuration
|
||||
* @{
|
||||
*/
|
||||
extern mtd_dev_t *mtd0;
|
||||
#define MTD_0 mtd0
|
||||
#define MTD_0 mtd_dev_get(0)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
@ -65,11 +63,6 @@ extern mtd_dev_t *mtd0;
|
||||
#define XTIMER_HZ (1000000ul)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @brief Initialize board specific hardware, including clock, LEDs and std-IO
|
||||
*/
|
||||
void board_init(void);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
@ -238,16 +238,15 @@ static const sam0_common_usb_config_t sam_usbdev_config[] = {
|
||||
|
||||
#define ADC_NEG_INPUT ADC_INPUTCTRL_MUXNEG(0x18u)
|
||||
#define ADC_REF_DEFAULT ADC_REFCTRL_REFSEL_INTVCC1
|
||||
#define ADC_DEV ADC0
|
||||
|
||||
static const adc_conf_chan_t adc_channels[] = {
|
||||
/* port, pin, muxpos */
|
||||
{GPIO_PIN(PA, 2), ADC_INPUTCTRL_MUXPOS(ADC_INPUTCTRL_MUXPOS_AIN0)},
|
||||
{GPIO_PIN(PA, 5), ADC_INPUTCTRL_MUXPOS(ADC_INPUTCTRL_MUXPOS_AIN5)},
|
||||
{GPIO_PIN(PB, 8), ADC_INPUTCTRL_MUXPOS(ADC_INPUTCTRL_MUXPOS_AIN2)},
|
||||
{GPIO_PIN(PB, 9), ADC_INPUTCTRL_MUXPOS(ADC_INPUTCTRL_MUXPOS_AIN3)},
|
||||
{GPIO_PIN(PA, 4), ADC_INPUTCTRL_MUXPOS(ADC_INPUTCTRL_MUXPOS_AIN4)},
|
||||
{GPIO_PIN(PA, 6), ADC_INPUTCTRL_MUXPOS(ADC_INPUTCTRL_MUXPOS_AIN6)},
|
||||
/* port, pin, muxpos, dev */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA02, .dev = ADC0 },
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA05, .dev = ADC0 },
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PB08, .dev = ADC0 },
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PB09, .dev = ADC0 },
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA04, .dev = ADC0 },
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA06, .dev = ADC0 },
|
||||
};
|
||||
|
||||
#define ADC_NUMOF ARRAY_SIZE(adc_channels)
|
||||
|
||||
@ -20,4 +20,9 @@ config BOARD_ADAFRUIT_ITSYBITSY_NRF52
|
||||
|
||||
select HAVE_SAUL_GPIO
|
||||
|
||||
select MODULE_USB_BOARD_RESET if KCONFIG_USB && TEST_KCONFIG
|
||||
|
||||
config FORCE_USB_STDIO
|
||||
default y
|
||||
|
||||
source "$(RIOTBOARD)/common/nrf52/Kconfig"
|
||||
|
||||
@ -9,10 +9,4 @@ FEATURES_PROVIDED += periph_usbdev
|
||||
# Various other features (if any)
|
||||
FEATURES_PROVIDED += highlevel_stdio
|
||||
|
||||
# This configuration enables modules that are only available when using Kconfig
|
||||
# module modelling
|
||||
ifeq (1,$(TEST_KCONFIG))
|
||||
KCONFIG_BOARD_CONFIG += $(RIOTBOARD)/common/nrf52/nrf52_bootloader.config
|
||||
endif
|
||||
|
||||
include $(RIOTBOARD)/common/nrf52/Makefile.features
|
||||
|
||||
@ -5,9 +5,9 @@
|
||||
|
||||
### General information
|
||||
|
||||
This is a small formfactor (only 1.4" long by 0.7" wide) nRF52840 board made by Adafruit.
|
||||
This is a small formfactor (only 1.4\" long by 0.7\" wide) nRF52840 board made by Adafruit.
|
||||
|
||||
The board features one LED (LD1: blue), a user (SW1) and a
|
||||
The board features one red LED (LD1), one DotStar / APA102 RGB LED, a user (SW1), a
|
||||
reset button as well as 21 configurable external pins(6 of which can be analog in).
|
||||
|
||||
### Links
|
||||
@ -42,9 +42,4 @@ you may need to run `pip3 install --upgrade pip3` before being able to run `pip3
|
||||
|
||||
The usual way to obtain a console on this board is using an emulated USB serial port.
|
||||
|
||||
|
||||
### Todo
|
||||
|
||||
Add support for the mini DotStar RGB LED
|
||||
|
||||
*/
|
||||
|
||||
@ -50,6 +50,15 @@ extern "C" {
|
||||
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name APA102 / DotStar configuration
|
||||
* @{
|
||||
*/
|
||||
#define APA102_PARAM_LED_NUMOF (1)
|
||||
#define APA102_PARAM_DATA_PIN GPIO_PIN(0, 8)
|
||||
#define APA102_PARAM_CLK_PIN GPIO_PIN(1, 9)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Button pin configuration
|
||||
* @{
|
||||
|
||||
@ -91,3 +91,4 @@ static const i2c_conf_t i2c_config[] = {
|
||||
#endif
|
||||
|
||||
#endif /* PERIPH_CONF_H */
|
||||
/** @} */
|
||||
|
||||
32
boards/adafruit-pybadge/Kconfig
Normal file
32
boards/adafruit-pybadge/Kconfig
Normal file
@ -0,0 +1,32 @@
|
||||
# Copyright (c) 2020 Inria
|
||||
#
|
||||
# This file is subject to the terms and conditions of the GNU Lesser
|
||||
# General Public License v2.1. See the file LICENSE in the top level
|
||||
# directory for more details.
|
||||
|
||||
config BOARD
|
||||
default "adafruit-pybadge" if BOARD_ADAFRUIT_PYBADGE
|
||||
|
||||
config BOARD_ADAFRUIT_PYBADGE
|
||||
bool
|
||||
default y
|
||||
select CPU_MODEL_SAMD51J19A
|
||||
select HAS_HIGHLEVEL_STDIO
|
||||
select HAS_PERIPH_ADC
|
||||
select HAS_PERIPH_DAC
|
||||
select HAS_PERIPH_I2C
|
||||
select HAS_PERIPH_PWM
|
||||
select HAS_PERIPH_RTC
|
||||
select HAS_PERIPH_RTT
|
||||
select HAS_PERIPH_SPI
|
||||
select HAS_PERIPH_TIMER
|
||||
select HAS_PERIPH_UART
|
||||
select HAS_PERIPH_USBDEV
|
||||
|
||||
select HAVE_ST7735
|
||||
select HAVE_SAUL_GPIO
|
||||
select HAVE_MTD_SPI_NOR
|
||||
# This specific board requires SPI_ON_QSPI for the MTD_SPI_NOR
|
||||
select MODULE_PERIPH_SPI_ON_QSPI if MODULE_MTD_SPI_NOR
|
||||
|
||||
source "$(RIOTBOARD)/common/samdx1-arduino-bootloader/Kconfig"
|
||||
5
boards/adafruit-pybadge/Makefile
Normal file
5
boards/adafruit-pybadge/Makefile
Normal file
@ -0,0 +1,5 @@
|
||||
MODULE = board
|
||||
|
||||
DIRS = $(RIOTBOARD)/common/samdx1-arduino-bootloader
|
||||
|
||||
include $(RIOTBASE)/Makefile.base
|
||||
15
boards/adafruit-pybadge/Makefile.dep
Normal file
15
boards/adafruit-pybadge/Makefile.dep
Normal file
@ -0,0 +1,15 @@
|
||||
ifneq (,$(filter saul_default,$(USEMODULE)))
|
||||
USEMODULE += saul_gpio
|
||||
endif
|
||||
|
||||
ifneq (,$(filter disp_dev,$(USEMODULE)))
|
||||
USEMODULE += st7735
|
||||
endif
|
||||
|
||||
ifneq (,$(filter mtd,$(USEMODULE)))
|
||||
FEATURES_REQUIRED += periph_spi_on_qspi
|
||||
USEMODULE += mtd_spi_nor
|
||||
endif
|
||||
|
||||
# setup the samd21 arduino bootloader related dependencies
|
||||
include $(RIOTBOARD)/common/samdx1-arduino-bootloader/Makefile.dep
|
||||
15
boards/adafruit-pybadge/Makefile.features
Normal file
15
boards/adafruit-pybadge/Makefile.features
Normal file
@ -0,0 +1,15 @@
|
||||
CPU = samd5x
|
||||
CPU_MODEL = samd51j19a
|
||||
|
||||
# Put defined MCU peripherals here (in alphabetical order)
|
||||
FEATURES_PROVIDED += highlevel_stdio
|
||||
FEATURES_PROVIDED += periph_adc
|
||||
FEATURES_PROVIDED += periph_dac
|
||||
FEATURES_PROVIDED += periph_i2c
|
||||
FEATURES_PROVIDED += periph_pwm
|
||||
FEATURES_PROVIDED += periph_rtc
|
||||
FEATURES_PROVIDED += periph_rtt
|
||||
FEATURES_PROVIDED += periph_spi
|
||||
FEATURES_PROVIDED += periph_timer
|
||||
FEATURES_PROVIDED += periph_uart
|
||||
FEATURES_PROVIDED += periph_usbdev
|
||||
9
boards/adafruit-pybadge/Makefile.include
Normal file
9
boards/adafruit-pybadge/Makefile.include
Normal file
@ -0,0 +1,9 @@
|
||||
CFLAGS += -DBOOTLOADER_UF2
|
||||
|
||||
# stdio over usb takes several seconds to be up after flashing
|
||||
TERM_DELAY ?= 4
|
||||
|
||||
# Include all definitions for flashing with bossa other USB
|
||||
include $(RIOTBOARD)/common/samdx1-arduino-bootloader/Makefile.include
|
||||
# Include handling of serial and non-bossa programmers (if selected by user)
|
||||
include $(RIOTMAKE)/boards/sam0.inc.mk
|
||||
70
boards/adafruit-pybadge/board.c
Normal file
70
boards/adafruit-pybadge/board.c
Normal file
@ -0,0 +1,70 @@
|
||||
/*
|
||||
* Copyright (C) 2020 Inria
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-pybadge
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board initialization for the Adafruit PyBadge
|
||||
*
|
||||
* @author Alexandre Abadie <alexandre.abadie@inria.fr>
|
||||
*
|
||||
* @}
|
||||
*/
|
||||
|
||||
#include "cpu.h"
|
||||
#include "board.h"
|
||||
#include "mtd_spi_nor.h"
|
||||
#include "timex.h"
|
||||
|
||||
#include "periph/gpio.h"
|
||||
|
||||
#if IS_USED(MODULE_MTD)
|
||||
/* GD25Q16C */
|
||||
static const mtd_spi_nor_params_t _samd51_nor_params = {
|
||||
.opcode = &mtd_spi_nor_opcode_default,
|
||||
.wait_chip_erase = 15 * US_PER_SEC,
|
||||
.wait_32k_erase = 150 * US_PER_MS,
|
||||
.wait_64k_erase = 250 * US_PER_MS,
|
||||
.wait_sector_erase = 50 * US_PER_MS,
|
||||
.wait_chip_wake_up = 1 * US_PER_MS,
|
||||
.clk = MHZ(54),
|
||||
.flag = SPI_NOR_F_SECT_4K
|
||||
| SPI_NOR_F_SECT_32K
|
||||
| SPI_NOR_F_SECT_64K,
|
||||
.spi = SPI_DEV(3),
|
||||
.mode = SPI_MODE_0,
|
||||
.cs = SAM0_QSPI_PIN_CS,
|
||||
.wp = SAM0_QSPI_PIN_DATA_2,
|
||||
.hold = SAM0_QSPI_PIN_DATA_3,
|
||||
};
|
||||
|
||||
static mtd_spi_nor_t samd51_nor_dev = {
|
||||
.base = {
|
||||
.driver = &mtd_spi_nor_driver,
|
||||
.page_size = 256,
|
||||
.pages_per_sector = 16,
|
||||
},
|
||||
.params = &_samd51_nor_params,
|
||||
};
|
||||
|
||||
MTD_XFA_ADD(samd51_nor_dev, 0);
|
||||
#endif /* MODULE_MTD */
|
||||
|
||||
void board_init(void)
|
||||
{
|
||||
if (IS_USED(MODULE_DAC_DDS)) {
|
||||
gpio_init(SPEAKER_ENABLE_PIN, GPIO_OUT);
|
||||
gpio_set(SPEAKER_ENABLE_PIN);
|
||||
}
|
||||
|
||||
if (IS_USED(MODULE_ST77XX)) {
|
||||
gpio_init(BACKLIGHT_PIN, GPIO_OUT);
|
||||
}
|
||||
}
|
||||
40
boards/adafruit-pybadge/doc.txt
Normal file
40
boards/adafruit-pybadge/doc.txt
Normal file
@ -0,0 +1,40 @@
|
||||
/**
|
||||
@defgroup boards_adafruit-pybadge Adafruit PyBadge
|
||||
@ingroup boards
|
||||
@brief Support for the Adafruit PyBadge board.
|
||||
|
||||
### General information
|
||||
|
||||
The [Adafruit PyBadge](https://www.adafruit.com/product/4200) is a
|
||||
learning and development board that provides 5 Neopixel LEDs, an accelerometer,
|
||||
a light sensor, a speaker, several buttons and an LCD screen.
|
||||
It is powered by an Atmel SAMD51 microcontroller.
|
||||
|
||||
The display, RGB LEDs, buttons and accelerometer of this board are currently not supported.
|
||||
|
||||
The [Adafruit PyBadge LC](https://www.adafruit.com/product/3939) and
|
||||
[Adafruit EdgeBadge](https://www.adafruit.com/product/4400)) are
|
||||
variants of the Pybadge with small differences:
|
||||
- EdgeBadge provides an extra microphone (not supported)
|
||||
- PyBadgeLC only have one Neopixel LED (instead of 5)
|
||||
Both are compatible with the PyBadge RIOT port and the current port can easily
|
||||
be adapted/extended with their respective differences.
|
||||
|
||||
### Flash the board
|
||||
|
||||
Connect the board via USB and use `BOARD=adafruit-pybadge` with the `make` command;
|
||||
this uses the Arduino style bootloader preprogrammed on the board.<br/>
|
||||
Example with `hello-world` application:
|
||||
```
|
||||
make BOARD=adafruit-pybadge -C examples/hello-world flash
|
||||
```
|
||||
|
||||
In case of a crash of the firmware, one has to manually reset the board in
|
||||
bootloader mode to be able to re-flash it again: simply double tap the reset
|
||||
button before running the flash command provided above.
|
||||
|
||||
### Accessing STDIO via UART
|
||||
|
||||
STDIO of RIOT is directly available over the USB port.
|
||||
|
||||
*/
|
||||
119
boards/adafruit-pybadge/include/board.h
Normal file
119
boards/adafruit-pybadge/include/board.h
Normal file
@ -0,0 +1,119 @@
|
||||
/*
|
||||
* Copyright (C) 2020 Inria
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-pybadge
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board specific definitions for the Adafruit PyBadge
|
||||
*
|
||||
* @author Alexandre Abadie <alexandre.abadie@inria.fr>
|
||||
*/
|
||||
|
||||
#ifndef BOARD_H
|
||||
#define BOARD_H
|
||||
|
||||
#include "cpu.h"
|
||||
#include "periph/gpio.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @name LED pin definitions and handlers
|
||||
* @{
|
||||
*/
|
||||
#define LED0_PIN GPIO_PIN(PA, 23) /**< LED0 pin */
|
||||
|
||||
#define LED_PORT PORT->Group[PA] /**< LED0 port */
|
||||
#define LED0_MASK (1 << 23) /**< LED0 mask */
|
||||
|
||||
#define LED0_ON (LED_PORT.OUTSET.reg = LED0_MASK) /**< LED0 on macro */
|
||||
#define LED0_OFF (LED_PORT.OUTCLR.reg = LED0_MASK) /**< LED0 off macro */
|
||||
#define LED0_TOGGLE (LED_PORT.OUTTGL.reg = LED0_MASK) /**< LED0 toggle macro */
|
||||
|
||||
#define LED0_NAME "LED(Red)" /**< LED0 name */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Buttons control (TI SN74HC165 shift register)
|
||||
* @{
|
||||
*/
|
||||
#define BUTTON_LATCH GPIO_PIN(PB, 0) /**< Latch pin */
|
||||
#define BUTTON_CLK GPIO_PIN(PB, 31) /**< Clock pin */
|
||||
#define BUTTON_OUT GPIO_PIN(PB, 30) /**< Serial output pin */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Backlight control
|
||||
* @{
|
||||
*/
|
||||
#define BACKLIGHT_PIN GPIO_PIN(PA, 1) /**< Backlight pin */
|
||||
#define BACKLIGHT_PORT PORT->Group[PA] /**< Backlight pin port */
|
||||
#define BACKLIGHT_MASK (1 << 1) /**< Backlight pin mask */
|
||||
#define BACKLIGHT_ON (BACKLIGHT_PORT.OUTSET.reg = BACKLIGHT_MASK) /**< Turn backlight on */
|
||||
#define BACKLIGHT_OFF (BACKLIGHT_PORT.OUTCLR.reg = BACKLIGHT_MASK) /**< Turn backlight off */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Display configuration (not supported yet)
|
||||
* @{
|
||||
*/
|
||||
#define ST77XX_PARAM_CNTRL ST77XX_CNTRL_ST7735 /**< ST77xx controller variant */
|
||||
#define ST77XX_PARAM_SPI SPI_DEV(1) /**< SPI device */
|
||||
#define ST77XX_PARAM_CS GPIO_PIN(PB, 7) /**< Chip select pin */
|
||||
#define ST77XX_PARAM_DCX GPIO_PIN(PB, 5) /**< DCX pin */
|
||||
#define ST77XX_PARAM_RST GPIO_PIN(PA, 0) /**< Reset pin */
|
||||
#define ST77XX_PARAM_NUM_LINES (160U) /**< Number of screen lines */
|
||||
#define ST77XX_PARAM_RGB_CHANNELS (128U) /**< Number of screen rgb channel (height) */
|
||||
#define ST77XX_PARAM_RGB (1) /**< RGB configuration */
|
||||
#define ST77XX_PARAM_INVERTED (0) /**< Inversion configuration */
|
||||
#define ST77XX_PARAM_ROTATION ST77XX_ROTATION_90 /**< Rotation mode */
|
||||
#define LCD_SCREEN_WIDTH (ST77XX_PARAM_NUM_LINES) /**< LCD screen width */
|
||||
#define LCD_SCREEN_HEIGHT (ST77XX_PARAM_RGB_CHANNELS) /**< LCD screen height */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Neopixel LEDs (not supported yet)
|
||||
* @{
|
||||
*/
|
||||
#define WS281X_PARAM_PIN (GPIO_PIN(PA, 15)) /**< GPIO pin connected to the data pin of the first LED */
|
||||
#define WS281X_PARAM_NUMOF (5U) /**< Number of LEDs chained */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Speaker (supported via DAC DDS module)
|
||||
* @{
|
||||
*/
|
||||
#define SPEAKER_ENABLE_PIN GPIO_PIN(PA, 27) /**< Speaker enable pin */
|
||||
#define SPEAKER_PIN GPIO_PIN(PA, 2) /**< Speaker pin (A0) */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name MTD configuration
|
||||
* @{
|
||||
*/
|
||||
#define MTD_0 mtd_dev_get(0) /**< MTD_0 constant */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name Xtimer configuration
|
||||
* @{
|
||||
*/
|
||||
#define XTIMER_WIDTH (32) /**< Default timer is 32bit width */
|
||||
#define XTIMER_HZ (1000000ul) /**< Default timer runs at 1MHz */
|
||||
/** @} */
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* BOARD_H */
|
||||
/** @} */
|
||||
46
boards/adafruit-pybadge/include/gpio_params.h
Normal file
46
boards/adafruit-pybadge/include/gpio_params.h
Normal file
@ -0,0 +1,46 @@
|
||||
/*
|
||||
* Copyright (C) 2020 Inria
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-pybadge
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Board specific configuration of direct mapped GPIOs
|
||||
*
|
||||
* @author Alexandre Abadie <alexandre.abadie@inria.fr>
|
||||
*/
|
||||
|
||||
#ifndef GPIO_PARAMS_H
|
||||
#define GPIO_PARAMS_H
|
||||
|
||||
#include "board.h"
|
||||
#include "saul/periph.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @brief GPIO pin configuration
|
||||
*/
|
||||
static const saul_gpio_params_t saul_gpio_params[] =
|
||||
{
|
||||
{
|
||||
.name = LED0_NAME,
|
||||
.pin = LED0_PIN,
|
||||
.mode = GPIO_OUT
|
||||
},
|
||||
};
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* GPIO_PARAMS_H */
|
||||
/** @} */
|
||||
304
boards/adafruit-pybadge/include/periph_conf.h
Normal file
304
boards/adafruit-pybadge/include/periph_conf.h
Normal file
@ -0,0 +1,304 @@
|
||||
/*
|
||||
* Copyright (C) 2020 Inria
|
||||
*
|
||||
* This file is subject to the terms and conditions of the GNU Lesser
|
||||
* General Public License v2.1. See the file LICENSE in the top level
|
||||
* directory for more details.
|
||||
*/
|
||||
|
||||
/**
|
||||
* @ingroup boards_adafruit-pybadge
|
||||
* @{
|
||||
*
|
||||
* @file
|
||||
* @brief Configuration of CPU peripherals for the Adafruit PyBadge
|
||||
*
|
||||
* @author Alexandre Abadie <alexandre.abadie@inria.fr>
|
||||
*/
|
||||
|
||||
#ifndef PERIPH_CONF_H
|
||||
#define PERIPH_CONF_H
|
||||
|
||||
#include "periph_cpu.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @name desired core clock frequency
|
||||
* @{
|
||||
*/
|
||||
#ifndef CLOCK_CORECLOCK
|
||||
#define CLOCK_CORECLOCK MHZ(120)
|
||||
#endif
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name 32kHz Oscillator configuration
|
||||
* @{
|
||||
*/
|
||||
#define EXTERNAL_OSC32_SOURCE 0
|
||||
#define ULTRA_LOW_POWER_INTERNAL_OSC_SOURCE 1
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @brief Enable the internal DC/DC converter
|
||||
* The board is equipped with the necessary inductor.
|
||||
*/
|
||||
#define USE_VREG_BUCK (1)
|
||||
|
||||
/**
|
||||
* @name Timer peripheral configuration
|
||||
* @{
|
||||
*/
|
||||
static const tc32_conf_t timer_config[] = {
|
||||
{ /* Timer 0 - System Clock */
|
||||
.dev = TC0,
|
||||
.irq = TC0_IRQn,
|
||||
.mclk = &MCLK->APBAMASK.reg,
|
||||
.mclk_mask = MCLK_APBAMASK_TC0 | MCLK_APBAMASK_TC1,
|
||||
.gclk_id = TC0_GCLK_ID,
|
||||
.gclk_src = SAM0_GCLK_TIMER,
|
||||
.flags = TC_CTRLA_MODE_COUNT32,
|
||||
},
|
||||
{ /* Timer 1 */
|
||||
.dev = TC2,
|
||||
.irq = TC2_IRQn,
|
||||
.mclk = &MCLK->APBBMASK.reg,
|
||||
.mclk_mask = MCLK_APBBMASK_TC2 | MCLK_APBBMASK_TC3,
|
||||
.gclk_id = TC2_GCLK_ID,
|
||||
.gclk_src = SAM0_GCLK_TIMER,
|
||||
.flags = TC_CTRLA_MODE_COUNT32,
|
||||
}
|
||||
};
|
||||
|
||||
/* Timer 0 configuration */
|
||||
#define TIMER_0_CHANNELS 2
|
||||
#define TIMER_0_ISR isr_tc0
|
||||
|
||||
/* Timer 1 configuration */
|
||||
#define TIMER_1_CHANNELS 2
|
||||
#define TIMER_1_ISR isr_tc2
|
||||
|
||||
#define TIMER_NUMOF ARRAY_SIZE(timer_config)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name UART configuration
|
||||
* @{
|
||||
*/
|
||||
static const uart_conf_t uart_config[] = {
|
||||
{ /* Virtual COM Port */
|
||||
.dev = &SERCOM5->USART,
|
||||
.rx_pin = GPIO_PIN(PB, 16),
|
||||
.tx_pin = GPIO_PIN(PB, 17),
|
||||
#ifdef MODULE_SAM0_PERIPH_UART_HW_FC
|
||||
.rts_pin = GPIO_UNDEF,
|
||||
.cts_pin = GPIO_UNDEF,
|
||||
#endif
|
||||
.mux = GPIO_MUX_C,
|
||||
.rx_pad = UART_PAD_RX_1,
|
||||
.tx_pad = UART_PAD_TX_0,
|
||||
.flags = UART_FLAG_NONE,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
}
|
||||
};
|
||||
|
||||
/* interrupt function name mapping */
|
||||
#define UART_0_ISR isr_sercom5_2
|
||||
#define UART_0_ISR_TX isr_sercom5_0
|
||||
|
||||
#define UART_NUMOF ARRAY_SIZE(uart_config)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name PWM configuration
|
||||
* @{
|
||||
*/
|
||||
#define PWM_0_EN 1
|
||||
|
||||
#if PWM_0_EN
|
||||
/* PWM0 channels */
|
||||
static const pwm_conf_chan_t pwm_chan0_config[] = {
|
||||
/* GPIO pin, MUX value, TCC channel */
|
||||
{ GPIO_PIN(PA, 22), GPIO_MUX_G, 2 },
|
||||
};
|
||||
#endif
|
||||
|
||||
/* PWM device configuration */
|
||||
static const pwm_conf_t pwm_config[] = {
|
||||
#if PWM_0_EN
|
||||
{ .tim = TCC_CONFIG(TCC0),
|
||||
.chan = pwm_chan0_config,
|
||||
.chan_numof = ARRAY_SIZE(pwm_chan0_config),
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
},
|
||||
#endif
|
||||
};
|
||||
|
||||
/* number of devices that are actually defined */
|
||||
#define PWM_NUMOF ARRAY_SIZE(pwm_config)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name SPI configuration
|
||||
* @{
|
||||
*/
|
||||
static const spi_conf_t spi_config[] = {
|
||||
{
|
||||
.dev = &(SERCOM1->SPI),
|
||||
.miso_pin = GPIO_PIN(PB, 22),
|
||||
.mosi_pin = GPIO_PIN(PB, 23),
|
||||
.clk_pin = GPIO_PIN(PA, 17),
|
||||
.miso_mux = GPIO_MUX_C,
|
||||
.mosi_mux = GPIO_MUX_C,
|
||||
.clk_mux = GPIO_MUX_C,
|
||||
.miso_pad = SPI_PAD_MISO_2,
|
||||
.mosi_pad = SPI_PAD_MOSI_3_SCK_1,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
#ifdef MODULE_PERIPH_DMA
|
||||
.tx_trigger = SERCOM1_DMAC_ID_TX,
|
||||
.rx_trigger = SERCOM1_DMAC_ID_RX,
|
||||
#endif
|
||||
},
|
||||
{ /* Connected to TFT display */
|
||||
.dev = &(SERCOM4->SPI),
|
||||
.miso_pin = GPIO_PIN(PB, 12),
|
||||
.mosi_pin = GPIO_PIN(PB, 15),
|
||||
.clk_pin = GPIO_PIN(PB, 13),
|
||||
.miso_mux = GPIO_MUX_C,
|
||||
.mosi_mux = GPIO_MUX_C,
|
||||
.clk_mux = GPIO_MUX_C,
|
||||
.miso_pad = SPI_PAD_MISO_0,
|
||||
.mosi_pad = SPI_PAD_MOSI_3_SCK_1,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
#ifdef MODULE_PERIPH_DMA
|
||||
.tx_trigger = SERCOM4_DMAC_ID_TX,
|
||||
.rx_trigger = SERCOM4_DMAC_ID_RX,
|
||||
#endif
|
||||
},
|
||||
{ /* Connected to PDM Mic */
|
||||
.dev = &(SERCOM3->SPI),
|
||||
.miso_pin = GPIO_PIN(PA, 18),
|
||||
.mosi_pin = GPIO_PIN(PA, 19),
|
||||
.clk_pin = GPIO_PIN(PA, 16),
|
||||
.miso_mux = GPIO_MUX_D,
|
||||
.mosi_mux = GPIO_MUX_D,
|
||||
.clk_mux = GPIO_MUX_D,
|
||||
.miso_pad = SPI_PAD_MISO_2,
|
||||
.mosi_pad = SPI_PAD_MOSI_3_SCK_1,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
#ifdef MODULE_PERIPH_DMA
|
||||
.tx_trigger = SERCOM4_DMAC_ID_TX,
|
||||
.rx_trigger = SERCOM4_DMAC_ID_RX,
|
||||
#endif
|
||||
},
|
||||
#ifdef MODULE_PERIPH_SPI_ON_QSPI
|
||||
{ /* QSPI in SPI mode */
|
||||
.dev = QSPI,
|
||||
.miso_pin = SAM0_QSPI_PIN_DATA_1,
|
||||
.mosi_pin = SAM0_QSPI_PIN_DATA_0,
|
||||
.clk_pin = SAM0_QSPI_PIN_CLK,
|
||||
.miso_mux = SAM0_QSPI_MUX,
|
||||
.mosi_mux = SAM0_QSPI_MUX,
|
||||
.clk_mux = SAM0_QSPI_MUX,
|
||||
.miso_pad = SPI_PAD_MISO_0, /* unused */
|
||||
.mosi_pad = SPI_PAD_MOSI_0_SCK_1, /* unused */
|
||||
.gclk_src = SAM0_GCLK_MAIN, /* unused */
|
||||
#ifdef MODULE_PERIPH_DMA
|
||||
.tx_trigger = QSPI_DMAC_ID_TX,
|
||||
.rx_trigger = QSPI_DMAC_ID_RX,
|
||||
#endif
|
||||
},
|
||||
#endif
|
||||
};
|
||||
|
||||
#define SPI_NUMOF ARRAY_SIZE(spi_config)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name I2C configuration
|
||||
* @{
|
||||
*/
|
||||
static const i2c_conf_t i2c_config[] = {
|
||||
{
|
||||
.dev = &(SERCOM2->I2CM),
|
||||
.speed = I2C_SPEED_NORMAL,
|
||||
.scl_pin = GPIO_PIN(PA, 13),
|
||||
.sda_pin = GPIO_PIN(PA, 12),
|
||||
.mux = GPIO_MUX_C,
|
||||
.gclk_src = SAM0_GCLK_PERIPH,
|
||||
.flags = I2C_FLAG_NONE
|
||||
},
|
||||
};
|
||||
#define I2C_NUMOF ARRAY_SIZE(i2c_config)
|
||||
/** @} */
|
||||
|
||||
/**,
|
||||
* @name RTT configuration
|
||||
* @{
|
||||
*/
|
||||
#ifndef RTT_FREQUENCY
|
||||
#define RTT_FREQUENCY (32768U)
|
||||
#endif
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name USB peripheral configuration
|
||||
* @{
|
||||
*/
|
||||
static const sam0_common_usb_config_t sam_usbdev_config[] = {
|
||||
{
|
||||
.dm = GPIO_PIN(PA, 24),
|
||||
.dp = GPIO_PIN(PA, 25),
|
||||
.d_mux = GPIO_MUX_H,
|
||||
.device = &USB->DEVICE,
|
||||
.gclk_src = SAM0_GCLK_48MHZ,
|
||||
}
|
||||
};
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name ADC Configuration
|
||||
* @{
|
||||
*/
|
||||
|
||||
/* ADC Default values */
|
||||
#define ADC_PRESCALER ADC_CTRLA_PRESCALER_DIV128
|
||||
|
||||
#define ADC_NEG_INPUT ADC_INPUTCTRL_MUXNEG(0x18u)
|
||||
#define ADC_REF_DEFAULT ADC_REFCTRL_REFSEL_INTVCC1
|
||||
|
||||
static const adc_conf_chan_t adc_channels[] = {
|
||||
/* port, pin, muxpos, dev */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA05, .dev = ADC0 }, /* A1 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PB08, .dev = ADC0 }, /* A2 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PB09, .dev = ADC0 }, /* A3 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA04, .dev = ADC0 }, /* A4 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PA06, .dev = ADC0 }, /* A5 */
|
||||
{ .inputctrl = ADC0_INPUTCTRL_MUXPOS_PB01, .dev = ADC0 }, /* A6 - VMEAS */
|
||||
{ .inputctrl = ADC1_INPUTCTRL_MUXPOS_PB04, .dev = ADC1 }, /* A7 - Light sensor */
|
||||
};
|
||||
|
||||
#define ADC_NUMOF ARRAY_SIZE(adc_channels)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @name DAC configuration
|
||||
* @{
|
||||
*/
|
||||
#define DAC_CLOCK SAM0_GCLK_TIMER /**< Must not exceed 12 MHz */
|
||||
/** Use external reference voltage on PA03
|
||||
*
|
||||
* PA03 has to be manually connected to Vcc.
|
||||
* Internal reference only gives 1V */
|
||||
#define DAC_VREF DAC_CTRLB_REFSEL_VREFPU
|
||||
/** @} */
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif /* PERIPH_CONF_H */
|
||||
/** @} */
|
||||
@ -11,13 +11,11 @@ usual micro-controller peripherals with a 2.4GHz radio that supports both
|
||||
Nordics proprietary ShockBurst as well as Bluetooth Low Energy (BLE).
|
||||
|
||||
The board was available via
|
||||
[Indiegogo]
|
||||
(https://www.indiegogo.com/projects/airfy-beacon-make-your-smart-home-even-smarter).
|
||||
[Indiegogo](https://www.indiegogo.com/projects/airfy-beacon-make-your-smart-home-even-smarter).
|
||||
|
||||
## Hardware
|
||||
|
||||
![airfy-beacon]
|
||||
(https://raw.githubusercontent.com/wiki/RIOT-OS/RIOT/images/airfy-beacon.jpg)
|
||||
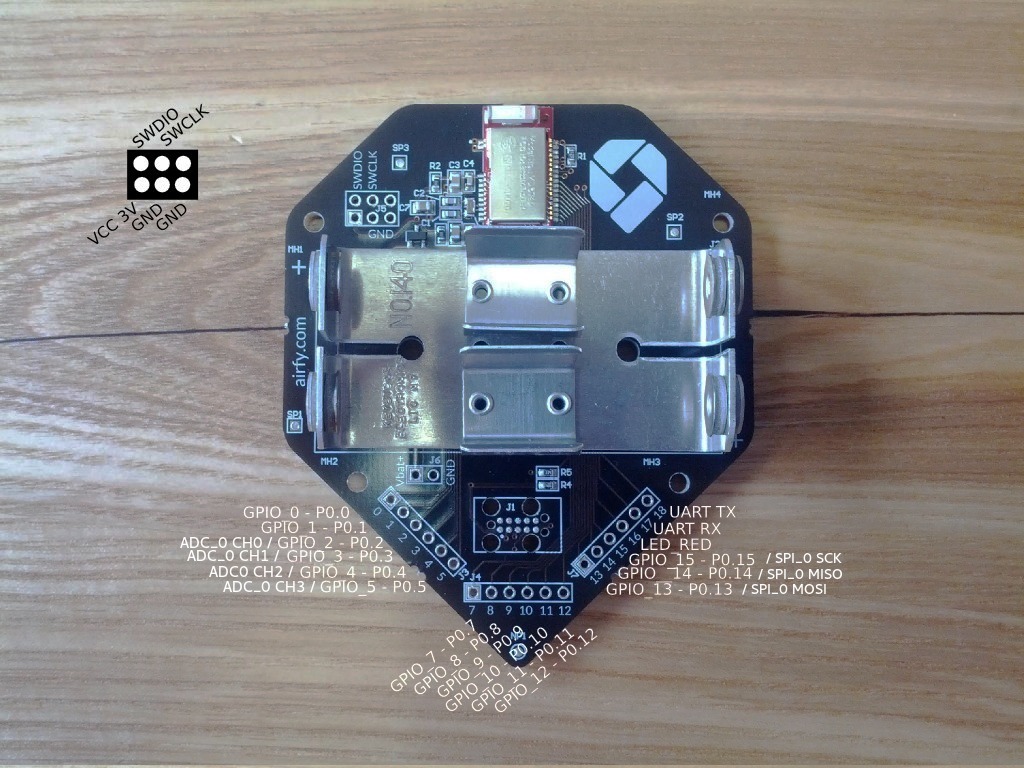
|
||||
|
||||
| MCU | NRF51822QFAA |
|
||||
|:--------------------- |:--------------------------------- |
|
||||
@ -84,7 +82,7 @@ SUBSYSTEMS=="usb", ATTRS{idVendor}=="0483", ATTRS{idProduct}=="3748", \
|
||||
# If you share your linux system with other users, or just don't like the
|
||||
# idea of write permission for everybody, you can replace MODE:="0666" with
|
||||
# OWNER:="yourusername" to create the device owned by you, or with
|
||||
# GROUP:="somegroupname" and mange access using standard unix groups.
|
||||
# GROUP:="somegroupname" and manage access using standard unix groups.
|
||||
|
||||
> sudo cp 49-stlinkv2.rules /etc/udev/rules.d/
|
||||
> sudo udevadm control --reload-rules
|
||||
@ -114,8 +112,7 @@ SWD data I/O: SWDIO <-----------> SWDIO (CN3, pin4)
|
||||
|
||||
The following image shows the wiring for an SWD flasher board:
|
||||
|
||||
![airfy-beacon-flash-connect]
|
||||
(https://raw.githubusercontent.com/wiki/RIOT-OS/RIOT/images/airfy-beacon-flash-connect.jpg)
|
||||
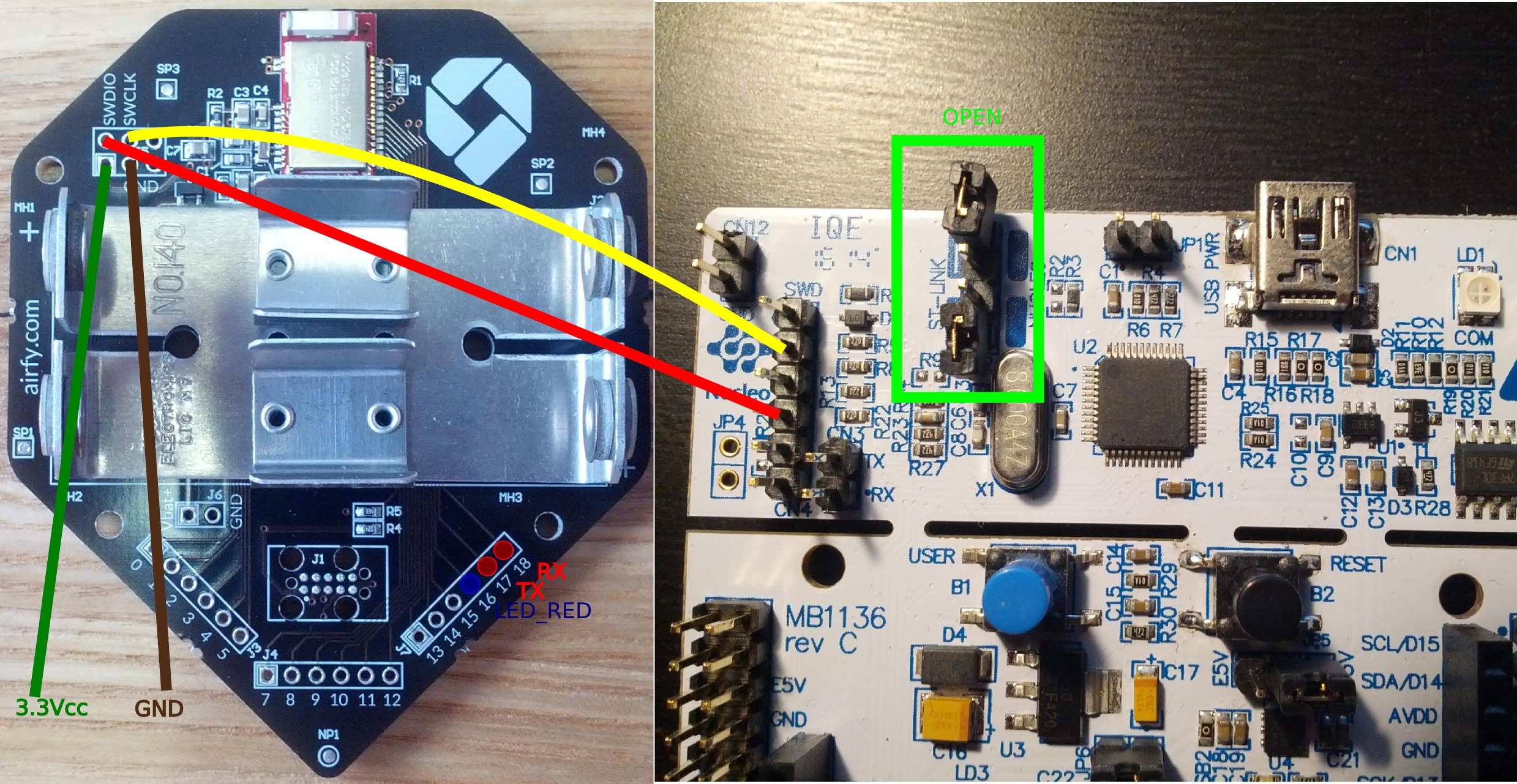
|
||||
|
||||
### Software
|
||||
Debugging and programming this module works well with
|
||||
|
||||
@ -31,13 +31,23 @@
|
||||
|
||||
/**
|
||||
* @name UART configuration
|
||||
*
|
||||
* The CPU only supports one UART device, so we keep it simple
|
||||
* @{
|
||||
*/
|
||||
#define UART_NUMOF (1U)
|
||||
#define UART_PIN_RX 17
|
||||
#define UART_PIN_TX 18
|
||||
static const uart_conf_t uart_config[] = {
|
||||
{ /* Mapped to USB virtual COM port */
|
||||
.dev = NRF_UART0,
|
||||
.rx_pin = GPIO_PIN(0, 17),
|
||||
.tx_pin = GPIO_PIN(0, 18),
|
||||
#ifdef MODULE_PERIPH_UART_HW_FC
|
||||
.rts_pin = GPIO_UNDEF,
|
||||
.cts_pin = GPIO_UNDEF,
|
||||
#endif
|
||||
.irqn = UART0_IRQn,
|
||||
},
|
||||
};
|
||||
|
||||
#define UART_NUMOF ARRAY_SIZE(uart_config)
|
||||
#define UART_0_ISR isr_uart0
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
@ -96,3 +106,4 @@ static const adc_conf_t adc_config[] = {3, 4, 5, 6};
|
||||
#endif
|
||||
|
||||
#endif /* PERIPH_CONF_H */
|
||||
/** @} */
|
||||
|
||||
@ -31,26 +31,14 @@ extern "C" {
|
||||
* @name LED pin definitions and handlers
|
||||
* @{
|
||||
*/
|
||||
#define LED0_PIN GPIO_PIN(PORT_E, 7) /**< LED0 gpio pin */
|
||||
#define LED0_MASK (1 << 7) /**< LED0 gpio mask */
|
||||
#define LED0_PIN_NUM 7
|
||||
#define LED0_PORT_NUM PORT_E
|
||||
|
||||
#define LED0_ON (GPIOB->BSRR = LED0_MASK) /**< Turn on LED0 */
|
||||
#define LED0_OFF (GPIOB->BSRR = (LED0_MASK << 16)) /**< Turn off LED0 */
|
||||
#define LED0_TOGGLE (GPIOB->ODR ^= LED0_MASK) /**< Toggle LED0 */
|
||||
#define LED1_PIN_NUM 8
|
||||
#define LED1_PORT_NUM PORT_E
|
||||
|
||||
#define LED1_PIN GPIO_PIN(PORT_E, 8) /**< LED1 gpio pin */
|
||||
#define LED1_MASK (1 << 8) /**< LED1 gpio mask */
|
||||
|
||||
#define LED1_ON (GPIOE->BSRR = LED1_MASK) /**< Turn on LED1 */
|
||||
#define LED1_OFF (GPIOE->BSRR = (LED1_MASK << 16)) /**< Turn off LED1 */
|
||||
#define LED1_TOGGLE (GPIOE->ODR ^= LED1_MASK) /**< Toggle LED1 */
|
||||
|
||||
#define LED2_PIN GPIO_PIN(PORT_E, 9) /**< LED2 gpio pin */
|
||||
#define LED2_MASK (1 << 9) /**< LED2 gpio mask */
|
||||
|
||||
#define LED2_ON (GPIOE->BSRR = LED2_MASK) /**< Turn on LED2 */
|
||||
#define LED2_OFF (GPIOE->BSRR = (LED2_MASK << 16)) /**< Turn off LED2 */
|
||||
#define LED2_TOGGLE (GPIOE->ODR ^= LED2_MASK) /**< Toggle LED2 */
|
||||
#define LED2_PIN_NUM 9
|
||||
#define LED2_PORT_NUM PORT_E
|
||||
|
||||
/** @} */
|
||||
|
||||
@ -71,14 +59,11 @@ extern "C" {
|
||||
#define BTN2_MODE GPIO_IN_PD /**< Button 2 mode */
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @brief Initialize board specific hardware, including clock, LEDs and std-IO
|
||||
*/
|
||||
void board_init(void);
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
#include "stm32_leds.h"
|
||||
|
||||
#endif /* BOARD_H */
|
||||
/** @} */
|
||||
|
||||
@ -10,6 +10,7 @@ config BOARD_ARDUINO_DUEMILANOVE
|
||||
select BOARD_COMMON_ARDUINO_ATMEGA
|
||||
select CPU_MODEL_ATMEGA328P
|
||||
select MODULE_BOARDS_COMMON_ARDUINO-ATMEGA if TEST_KCONFIG
|
||||
select HAS_ARDUINO_SHIELD_UNO
|
||||
|
||||
config BOARD
|
||||
default "arduino-duemilanove" if BOARD_ARDUINO_DUEMILANOVE
|
||||
|
||||
@ -1,3 +1,4 @@
|
||||
CPU = atmega328p
|
||||
|
||||
FEATURES_PROVIDED += arduino_shield_uno
|
||||
include $(RIOTBOARD)/common/arduino-atmega/Makefile.features
|
||||
|
||||
@ -13,5 +13,6 @@ config BOARD_ARDUINO_LEONARDO
|
||||
select BOARD_COMMON_ARDUINO_ATMEGA
|
||||
select CPU_MODEL_ATMEGA32U4
|
||||
select MODULE_BOARDS_COMMON_ARDUINO-ATMEGA if TEST_KCONFIG
|
||||
select HAS_ARDUINO_SHIELD_UNO
|
||||
|
||||
source "$(RIOTBOARD)/common/arduino-atmega/Kconfig"
|
||||
|
||||
@ -1,3 +1,4 @@
|
||||
CPU = atmega32u4
|
||||
|
||||
FEATURES_PROVIDED += arduino_shield_uno
|
||||
include $(RIOTBOARD)/common/arduino-atmega/Makefile.features
|
||||
|
||||
@ -13,5 +13,7 @@ config BOARD_ARDUINO_MEGA2560
|
||||
select CPU_MODEL_ATMEGA2560
|
||||
select BOARD_COMMON_ARDUINO_ATMEGA
|
||||
select MODULE_BOARDS_COMMON_ARDUINO-ATMEGA if TEST_KCONFIG
|
||||
select HAS_ARDUINO_SHIELD_MEGA
|
||||
select HAS_ARDUINO_SHIELD_UNO
|
||||
|
||||
source "$(RIOTBOARD)/common/arduino-atmega/Kconfig"
|
||||
|
||||
@ -1,3 +1,6 @@
|
||||
CPU = atmega2560
|
||||
|
||||
FEATURES_PROVIDED += arduino_shield_mega
|
||||
FEATURES_PROVIDED += arduino_shield_uno
|
||||
|
||||
include $(RIOTBOARD)/common/arduino-atmega/Makefile.features
|
||||
|
||||
@ -3,4 +3,34 @@ BAUD ?= 9600
|
||||
|
||||
ARDUINO_MEGA2560_BOOTLOADER ?= stk500v2
|
||||
|
||||
# If port selection via ttys.py is enabled by `MOST_RECENT_PORT=1`, filter
|
||||
# USB serials to only select boards that identify as Arduino Mega 2560 or
|
||||
# ad Arduino Mega ADK (a special official Mega flavor that is compatible)
|
||||
TTY_BOARD_FILTER := --vendor 'Arduino' --model-db 'Mega 2560|Mega ADK'
|
||||
|
||||
# Same, but for clones using a cheap USB <--> UART chip rather than the
|
||||
# ATmega16U2
|
||||
TTY_BOARD_FILTER_CLONE := --driver 'cp210x|ch341'
|
||||
|
||||
# If set to 1, auto-detection of TTYs will also allow clones. This has a slight
|
||||
# disadvantage for users of genuine Arduino Mega 2560: If the board is not
|
||||
# plugged in, it will fall back to a detection that may yield false positives.
|
||||
# However, most people will plug in their boards correctly prior to typing
|
||||
# `make term`, so this is only a small loss for users of genuine
|
||||
# Arduino Mega 2560 but a big win for users of cheap clones. Still, users that
|
||||
# only will ever use genuine Arduino Mega 2560 boards can disable this via their
|
||||
# .profile or .bashrc if they want.
|
||||
ARDUINO_MEGA2560_COMPAT_WITH_CLONES ?= 1
|
||||
|
||||
ifeq (1,$(ARDUINO_MEGA2560_COMPAT_WITH_CLONES))
|
||||
TTY_SELECT_CMD := $(RIOTTOOLS)/usb-serial/ttys.py \
|
||||
--most-recent \
|
||||
--format path serial \
|
||||
$(TTY_BOARD_FILTER) || \
|
||||
$(RIOTTOOLS)/usb-serial/ttys.py \
|
||||
--most-recent \
|
||||
--format path serial \
|
||||
$(TTY_BOARD_FILTER_CLONE)
|
||||
endif
|
||||
|
||||
include $(RIOTBOARD)/common/arduino-atmega/Makefile.include
|
||||
|
||||
@ -72,8 +72,7 @@ to overwrite the bootloader on the MCU. Because of that it is a necessity to use
|
||||
an ISP (in system programmer) to do the debugging. This isn't an issue because
|
||||
all of the afore mentioned devices have ISP capabilities, but it requires some
|
||||
additional steps to get back normal operation after debugging:
|
||||
* flash a new arduino bootloader on the device, e.g. [this one]
|
||||
(https://raw.githubusercontent.com/arduino/Arduino-stk500v2-bootloader/master/goodHexFiles/stk500boot_v2_mega2560.hex)
|
||||
* flash a new arduino bootloader on the device, e.g. [this one](https://raw.githubusercontent.com/arduino/Arduino-stk500v2-bootloader/master/goodHexFiles/stk500boot_v2_mega2560.hex)
|
||||
* restore the fuses to the default state.
|
||||
|
||||
|
||||
|
||||
@ -19,12 +19,21 @@
|
||||
#ifndef BOARD_H
|
||||
#define BOARD_H
|
||||
|
||||
#include "board_common.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @name ztimer configuration values
|
||||
* @{
|
||||
*/
|
||||
#define CONFIG_ZTIMER_USEC_ADJUST_SET (132)
|
||||
#define CONFIG_ZTIMER_USEC_ADJUST_SLEEP (120)
|
||||
/** @} */
|
||||
|
||||
#include "board_common.h"
|
||||
|
||||
#ifdef __cplusplus
|
||||
}
|
||||
#endif
|
||||
|
||||
@ -29,11 +29,6 @@
|
||||
extern "C" {
|
||||
#endif
|
||||
|
||||
/**
|
||||
* @brief The on-board LED is connected to pin 6 on this board
|
||||
*/
|
||||
#define ARDUINO_LED (6U)
|
||||
|
||||
/**
|
||||
* @name LED pin definitions and handlers
|
||||
* @{
|
||||
|
||||
@ -40,11 +40,6 @@ extern "C" {
|
||||
#define ATA8520E_PARAM_RESET_PIN GPIO_PIN(PA, 27)
|
||||
/** @} */
|
||||
|
||||
/**
|
||||
* @brief The on-board LED is connected to pin 6 on this board
|
||||
*/
|
||||
#define ARDUINO_LED (6U)
|
||||
|
||||
/**
|
||||
* @name LED pin definitions and handlers
|
||||
* @{
|
||||
|
||||
@ -16,10 +16,10 @@ powered by an Atmel SAMD21 microcontroller.
|
||||
|
||||
### Flash the board
|
||||
|
||||
Use `BOARD=arduino-mkrgsm1400` with the `make` command.<br/>
|
||||
Use `BOARD=arduino-mkrwan1300` with the `make` command.<br/>
|
||||
Example with `hello-world` application:
|
||||
```
|
||||
make BOARD=arduino-mkrgsm1400 -C examples/hello-world flash
|
||||
make BOARD=arduino-mkrwan1300 -C examples/hello-world flash
|
||||
```
|
||||
|
||||
@note If the application crashes, automatic reflashing via USB, as explained
|
||||
@ -34,4 +34,4 @@ STDIO of RIOT is directly available over the USB port.
|
||||
The `TERM_DELAY` environment variable can be used to add a delay (in second)
|
||||
before opening the serial terminal. The default value is 2s which should be
|
||||
enough in most of the situation.
|
||||
*/
|
||||
*/
|
||||
|
||||
Some files were not shown because too many files have changed in this diff Show More
Loading…
Reference in New Issue
Block a user